Изобретение относится к судостроению, а именно к движителям надводных и подводных судов. Оно может быть также использовано в качестве вибрационного конвейера, а также в качестве наглядного пособия волнового движения.
Известно приводное устройство движителя лодок, содержащее двигатель с выходным валом и коробкой передач, кинематически связанной посредством силового механизма с вертикальной гибкой пластиной, и парные рычаги с лопастями, связанные с неподвижными обоймами (патент Японии 22887, 84 E 5, опубл. 1970).
Недостатком указанного устройства является низкая тяга движителя и устойчивость лодки при движении.
Известен движитель судна, содержащий две лопасти с приводом, включающим рычажный механизм, содержащий рычаги со сферическими шарнирами, а также эксцентрик, связанный с маятниковым рычагом и кривошипом, взаимодействующими посредством зубчатых передач с вертикальной гибкой лопастью (авторское свидетельство СССР 941239, В 63 Н 1/04, 1979).
Недостатком известного движителя судна является низкая тяга, связанная с тем, что вследствие постоянства положения осей закрепления вертикальной гибкой лопасти она может совершать движение либо по типу стоячей волны, либо по типу бегущей волны на ограниченных участках с переменной формой волны.
Прототипом заявляемого изобретения является движитель судна, содержащий лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кривошипно-ползунный синусный механизм с кривошипом, взаимодействующим посредством шатуна с ползуном, шарниры и поступательную пару (патент РФ 2143375, В 63 Н 1/37, 1998).
Недостатком прототипа является сложность конструкции привода лопасти волнового движителя, связанная с большим количеством звеньев его механизма.
Задачей создания изобретения является упрощение конструкции привода лопасти волнового движителя за счет уменьшения числа звеньев его механизма.
Этот технический результат достигается за счет того, что в движителе судна, содержащем лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кривошипно-ползунный синусный механизм с кривошипом, взаимодействующим посредством шатуна с ползуном, шарниры и поступательную пару, согласно изобретению лопасть соединена с ползуном синусного механизма посредством шарнира, а также снабжена жестко присоединенным к ней рычагом, свободный конец которого шарнирно связан со звеном поступательной пары, второе звено которой жестко соединено с шатуном синусного механизма и ориентировано вдоль направляющих его ползуна.
Соединение лопасти движителя с ползуном синусного механизма посредством шарнира, а также снабжение жестко присоединенным к ней рычагом, который шарнирно соединен со звеном поступательной пары, второе звено которой жестко соединено с шатуном синусного механизма и ориентировано вдоль направляющих ползуна, позволяет получить изменение поступательного и углового перемещений со смещением по фазе на 90o, т.е., например, изменение поступательного перемещения по закону синуса, а углового перемещения - по закону косинуса, и добиться тем самым волнообразного движения лопасти.
Сущность изобретения поясняется чертежом, где изображена принципиальная схема движителя судна.
Движитель судна содержит лопасть 1, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кривошипно-ползунный синусный механизм с кривошипом 2, взаимодействующим посредством шатуна 3 с ползуном 4. Лопасть 1 соединена с ползуном 4 синусного механизма посредством шарнира 5, а также снабжена жестко присоединенным к ней рычагом 6. Свободный конец рычага 6 шарнирно соединен со звеном 7 поступательной пары, второе звено 8 которой жестко соединено с шатуном 3 синусного механизма и ориентировано вдоль направляющих 9 его ползуна 4.
Движитель судна работает следующим образом. При вращении кривошипа 2 шатун 3 сообщает ползуну 4 возвратно-поступательное движение в вертикальном направлении по закону
y = rsinϕ, (1)
где r - радиус кривошипа,
ϕ - угол поворота кривошипа 2.
Одновременно конец рычага 6 вместе с шатуном 3, с которым он соединен посредством поступательной пары, получает возвратно-поступательное горизонтальное перемещение по закону
x = rcosϕ.
Тангенс угла поворота лопасти 2 при этом будет изменяться по закону
tgζ = r/1cosϕ, (2)
где l - длина рычага, или пропорционально производной от у, т.е. вертикальное перемещение лопасти 1 и угол ее поворота будут копировать синусоиду, в результате лопасть 1 будет совершать волнообразное движение.
Использование предлагаемого движителя судна позволяет повысить тягу движителя за счет придания исполнительному органу движителя судна волнообразного движения по типу бегущей волны при значительном упрощении конструкции привода лопасти волнового движителя за счет уменьшения числа звеньев его механизма более чем в два раза.
Устройство может быть изготовлено по существующей технологии и на существующем оборудовании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143375C1 |
| ДВИЖИТЕЛЬ СУДНА | 2005 |
|
RU2285634C1 |
| ДВИЖИТЕЛЬ С ГИДРОПРИВОДОМ | 2023 |
|
RU2817445C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ДВУКРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2229977C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| ПРИВОД ГЛАВНОГО ДВИЖЕНИЯ ПОПЕРЕЧНО-СТРОГАЛЬНОГО СТАНКА | 1994 |
|
RU2074055C1 |
Изобретение относится к судостроению, а именно к движителям надводных и подводных судов. Движитель судна содержит лопасть, соединенную с приводом ее поступательного и углового колебаний. Привод включает в себя кривошипно-ползунный синусный механизм с кривошипом, взаимодействующим посредством шатуна с ползуном, шарниры и поступательную пару. Лопасть соединена с ползуном синусного механизма посредством шарнира, а также снабжена жестко присоединенным к ней рычагом, свободный конец которого шарнирно связан со звеном поступательной пары, второе звено которой жестко соединено с шатуном синусного механизма и ориентировано вдоль направляющих его ползуна. Достигается упрощение конструкции привода лопасти волнового движителя. 1 ил.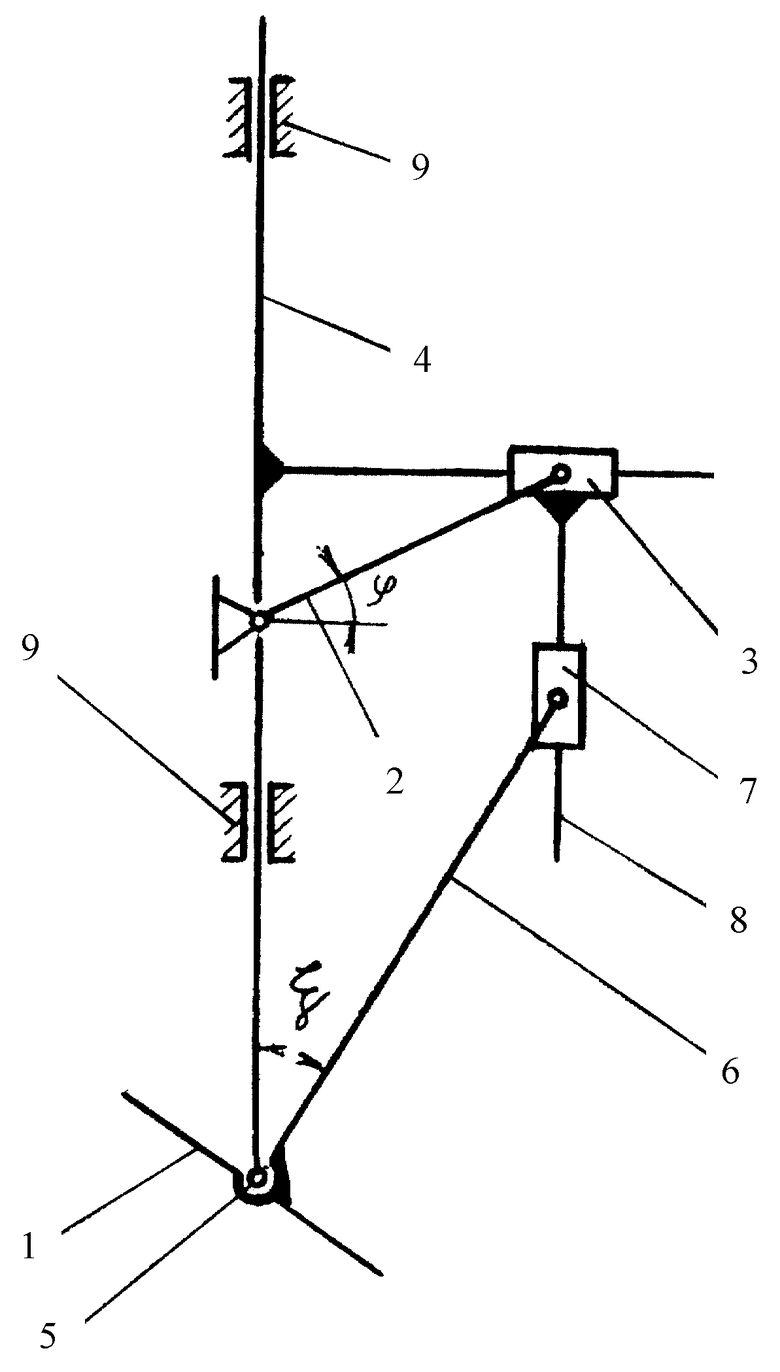
Движитель судна, содержащий лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кривошипно-ползунный синусный механизм с кривошипом, взаимодействующим посредством шатуна с ползуном, шарниры и поступательную пару, отличающийся тем, что лопасть соединена с ползуном синусного механизма посредством шарнира, а также снабжена жестко присоединенным к ней рычагом, который шарнирно связан со звеном поступательный пары, второе звено которой жестко соединено с шатуном синусного механизма и ориентировано вдоль направляющих его ползуна.
| ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143375C1 |
| Приводное устройство движителя для лодок | 1979 |
|
SU941239A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ТОКА С ВЕРТИКАЛЬНЫМ ЗАЖАТИЕМ НА КЛЕММЕ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2017 |
|
RU2708903C1 |
| КОСМИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2144889C1 |
