Изобретение относится к области инерционных движителей (называемых в ряде случаев инерцоидами), которые могут использованы преимущественно для перемещения транспортных средств на опорах качения или скольжения с трением.
Известны способ и устройство управления транспортным средством с инерционным движителем (1), по которым преобразуют периодическое силовое ударное воздействие инерционных элементов на корпус транспортного средства путем перемещения подпружиненных инерционных элементов.
Недостатком указанного способа и устройства является сложность реализации и управления направлением движения транспортного средства.
Известны способ управления транспортным средством с инерционным движителем и устройство для его осуществления (2). Данный способ и устройство для его осуществления являются наиболее близкими данному изобретению по технической сущности и достигаемому результату.
Известный способ управления транспортным средством с инерционным движителем состоит в том, что преобразуют периодическое кратковременное ударное воздействие вращающихся инерционных элементов на корпус транспортного средства в однонаправленную силу путем периодического перемещения инерционных элементов в радиальном направлении.
Известное устройство управления транспортным средством с инерционным движителем содержит маховик с кольцевым ободом, установленный на оси вращения привода. Внутри кольца размещены инерционные элементы, выполненные в виде шаров. Оно снабжено средством управления радиальным положением инерционных элементов, укрепленном на корпусе транспортного средства.
Для устранения возникающей реакции в виде момента вращения при разгоне вращающегося маховика на транспортном средстве может быть установлен подобный маховик, вращающийся в противоположном направлении с одинаковой частотой вращения.
Недостатком указанного способа и устройства является отсутствие возможности управления направлением однонаправленной силы и ее величиной, а следовательно, направлением и скоростью движения транспортного средства.
Техническая задача, поставленная в данном изобретении, состоит в обеспечении активного управления преобразованием вращательного движения инерционных элементов для получения управляемой однонаправленной силы движения (тяги).
Техническим результатом данного изобретения является повышение управляемости транспортного средства с инерционным движителем как в смысле регулирования величины однонаправленной силы движения (тяги), так и в смысле регулирования направления действия указанной силы.
Указанный технический результат достигается тем, что в известном способе управления транспортным средством с инерционным движителем, состоящем в преобразовании периодического ударного кратковременного воздействия вращающихся инерционных элементов на корпус транспортного средства в однонаправленную силу, путем периодического перемещения инерционных элементов в радиальном направлении, дополнительно осуществляют управление инерционными элементами по углу поворота и величине смещения.
Указанный технический результат достигается также тем, что известное устройство управления транспортным средством с инерционным движителем, содержащее маховик с кольцевым наружным ободом, установленный на оси вращения привода, инерционные элементы в виде шаров, размещенные внутри обода в ограничителях, снабжено средствами управления радиальным положением инерционных элементов.
Указанные средства управления соединены с усилителями мощности, которые включены в контур управления, содержащий датчик угла поворота, вычислитель и задающее устройство, посредством которого задают желаемое направление и скорость движения транспортного средства.
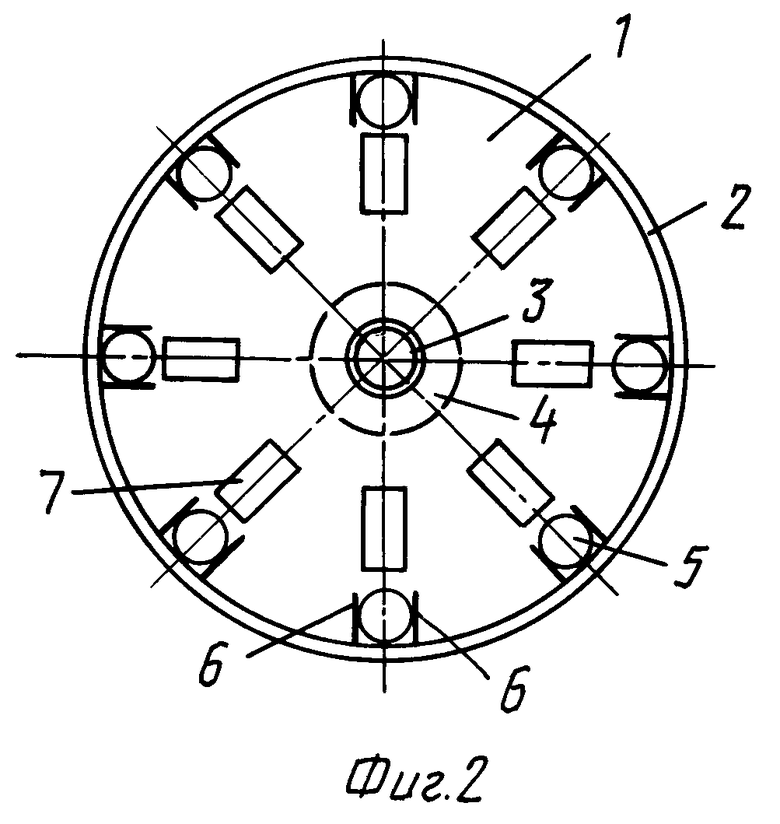
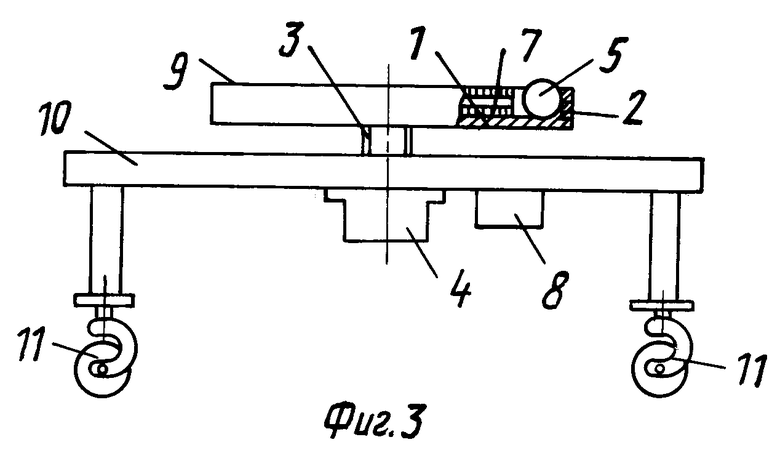
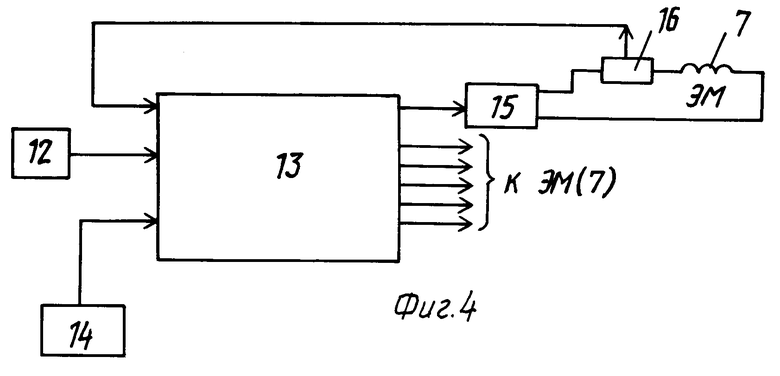
На фиг. 1 представлена функциональная схема реализации способа; на фиг. 2 - конструктивная схема инерционного движителя; на фиг. 3 - транспортное средство с инерционным движителем; на фиг. 4 - блок схема контура управления.
Функциональная схема реализации способа управления транспортным средством по фиг. 1 содержит маховик 1 с ободом 2, внутри которого размещены инерционные элементы 5 в виде шаров, которые вращаются вместе с маховиком 1.
При вращении инерционных элементов 5 на них действует центробежная сила Fц. В определенном положении инерционного элемента 5 на него воздействуют кратковременной импульсной силой управления Fу, направленной радиально к центру вращения. При этом инерционный элемент отрывается от обода 2. После прекращения действия силы Fу инерционный элемент под действием силы инерции ударяется об обод 2, передавая ему импульс количества движения.
Под действием этого импульса маховик 1 двигается в направлении этого импульса количества движения. Выбирая величину и момент приложения силы Fу в зависимости от угла поворота, можно изменять величину и направление скорости движения транспортного средства.
Устройство для реализации способа управления транспортным средством с инерционным движителем по фиг. 2 содержит маховик 1 с кольцевым наружным ободом 2, который установлен на ось вращения 3 привода 4. Внутри обода 2 размещены инерционные элементы 5, выполненные в виде шаров из ферромагнитного материала. В ободе 2 выполнены ограничители 6 (или лунки) для фиксации инерционных элементов 5, препятствующих смещениям по окружности. Напротив каждого инерционного элемента 5 на маховике 1 расположены средства 7 управления положением элементов 5, например, в виде электромагнитов. Эти средства управления подключены к блоку управления 8 транспортным средством. Описанное устройство представляет собой инерционный движитель 9.
Инерционный движитель 9 установлен на раме 10 транспортного средства (фиг. 3), которое в свою очередь размещено на опорах 11 с трением.
Блок управления 8 содержит датчик угла 12, вычислитель 13, задающее устройство 14 и усилители мощности 15. Датчик угла 12 поворота маховика 1 соединен с вычислителем 13, который подключен к задающему устройству 14, а усилитель 15 подключен к вычислителю 13 и средству управления 7 через датчик тока 16, который также подключен к вычислителю 13.
Данное устройство работает следующим образом.
Под действием привода маховик 1 раскручивается до высокой частоты вращения. Возникающая при этом центробежная сила прижимает инерционные элементы 5 к ободу 2 в положениях, определяемых фиксаторами 6. С помощью задающего устройства 14 в вычислитель 13 вводят желаемое направление и скорость движения транспортного средства. Вычислитель 13 определяет оценку угловой скорости из сигнала, формируемого датчиком углового положения 12. Вычислитель в зависимости от заданных направления и скорости и полученной оценки угловой скорости выбирает соответствующее этому заданию средство управления 7 (электромагнит) инерционным элементом 5 и вычисляет угол упреждения (время включения). При достижении определенным инерционным элементом 5 вычисленного угла поворота на средство управления 7 подается максимальное напряжение от усилителя мощности 15. Под действием возрастающей электромагнитной силы инерционный элемент 5 отрывается от обода 2 и перемещается по радиусу к центру вращения. При достижении другого углового положения, которое формируется вычислителем 13 в зависимости от частоты вращения и заданных направления и величины скорости движения транспортного средства, на средство управления 7 подается максимальное напряжение противоположного знака. Момент отключения напряжения определяется моментом достижения тока заранее заданного, малого близкого к нулю значения с помощью датчика тока 16. При снятии силы инерционный элемент 5 возвращается в исходное положение, определяемое фиксаторами 6, и передает импульс количества движения ободу 2. Обод 2, будучи связанный с рамой 10 транспортного средства, передает ему указанный импульс. В момент воздействия инерционного элемента 5 на обод 2 углового положения опор (колес) должно быть согласовано с выбранным направлением движения транспортного средства.
Источники информации
1. Патент RU 2062354, кл. F 03 G 3/08 от 20.06.1996, Бюл. 17.
2. Патент RU 2047001, кл. F 03 G 3/08 от 27.10.1995, Бюл. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2000 |
|
RU2196309C2 |
| СИСТЕМА ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2046990C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| СПОСОБ ОХЛАЖДЕНИЯ ЗОНЫ РЕЗАНИЯ | 1998 |
|
RU2125929C1 |
| СТАНЦИЯ ВЗРЫВНОГО ПУНКТА | 2005 |
|
RU2290670C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
| Транспортная система, содержащая трубопровод и транспортное средство для перемещения внутри трубопровода | 2019 |
|
RU2714277C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2200857C2 |
| МОБИЛЬНЫЙ ПРОЖЕКТОРНЫЙ КОМПЛЕКС "ГЕЛИОС" | 2008 |
|
RU2381116C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 1996 |
|
RU2110768C1 |
Способ и устройство для его осуществления предназначены для управления транспортным средством с инерционным движителем. При реализации способа преобразуют периодическое кратковременное воздействие вращающихся инерционных элементов на корпус в однонаправленную силу, при этом управление элементами осуществляют по величине смещения и углу поворота. Корпус выполнен в виде маховика с кольцевым наружным ободом, установленного на оси вращения привода. Инерционные элементы размещены внутри обода в ограничителях. Средства управления инерционными элементами соединены усилителями мощности, включенными в контур управления, содержащий датчик угла поворота, вычислитель и задающее устройство. Изобретение позволяет осуществить управление направлением и величиной воздействия инерционных элементов. 2 с.п.ф-лы, 4 ил.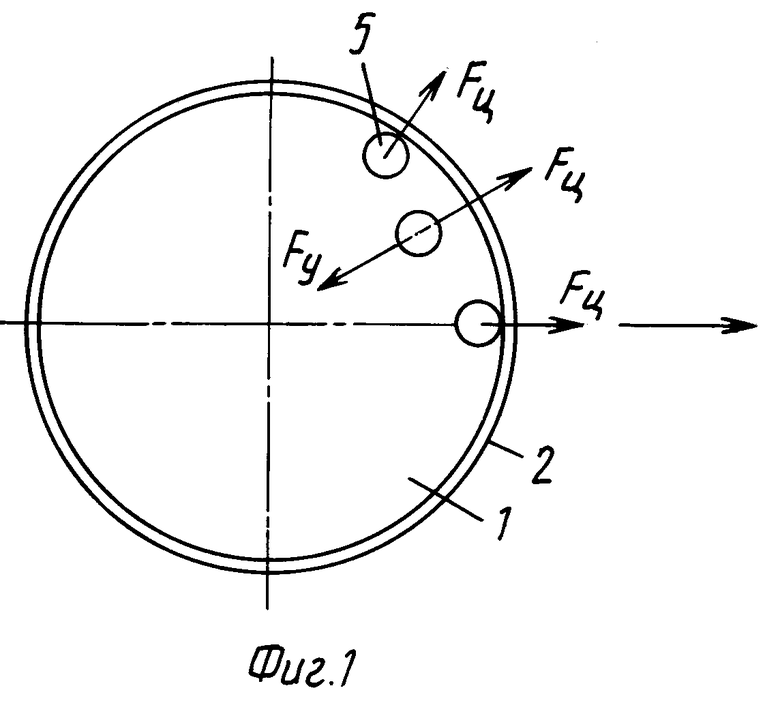
| СПОСОБ ПЕРЕДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047001C1 |
| RU 2062354 C1, 20.06.96 | |||
| СИЛОВАЯ ИНЕРЦИОННАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044158C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПОРАЗРЯДНОГО УРАВНОВЕШИВАНИЯ | 0 |
|
SU204699A1 |
| ПУЛЬСАТОР | 1996 |
|
RU2111654C1 |
| УСТРОЙСТВО ДЛЯ СУШКИ РАСТВОРОВ И СУСПЕНЗИЙ | 1991 |
|
RU2032876C1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
