Изобретение относится к гироскопической технике и может найти применение в составе одноосных или двухосных гировертикалей, построенных на базе индикаторных гироскопических стабилизаторов и совершающих движение близкое к горизонтальному.
Известны индикаторные гиростабилизаторы (одноосные, двухосные и трёхосные), построенные на трёхстепенных гироскопах (гироскоп может быть в кардановом подвесе, с шаровой опорой, динамически настраиваемым или поплавковым), контуры стабилизации которых состоят из последовательно соединённых датчика угла гироскопа, усилителя стабилизации и стабилизирующего мотора. Усилитель стабилизации включает последовательно соединённые предварительный усилитель, фазочувствительный выпрямитель, корректирующий фильтр (корректирующее звено), усилитель напряжения, усилитель мощности. (Индикаторные гироскопические платформы. п/р. Александрова А.Д. М., Машиностроение, 1978). При этом стабилизирующий мотор с целью устранения люфта может быть выполнен по двухдвигательной схеме на базе редукторного привода. Однако, имея положительные качества, такие схемы имеют значительные габариты, причём редукторные приводы являются также источниками дополнительных возмущающих моментов, обусловленных обкаткой редукторов.
Известны также индикаторные гиростабилизаторы, выпускаемые отечественной промышленностью, которые построены на трёхстепенных гироскопах, стабилизирующие моторы которых выполнены по безредукторной схеме и являются моментными двигателями постоянного тока с возбуждением от постоянных магнитов (Стабилизатор гироскопический Б-51. Техническое описание 6Ш2.564.005 ТО 1975).
При построении индикаторных гиростабилизаторов (ИГС) данного класса приходится решать задачу обеспечения устойчивости при заданной точности стабилизации (при большой крутизне контура стабилизации), когда собственное демпфирование относительно оси стабилизации, обусловленное стабилизирующим мотором, мало (так как отсутствует редуктор).
Обеспечение заданной точности стабилизации и устойчивости работы ИГС достигается подбором соответствующих корректирующих звеньев, включаемых в контур стабилизации. Однако с повышением точности стабилизации (уменьшением ошибки стабилизации) обеспечение устойчивости работы стабилизатора становится всё более сложной задачей.
Известен индикаторный гиростабилизатор (патент РФ № 2117915, МПК G01C 19/44. Пантелеев В.И., Кожин В.В. и др. Опубл. 20.08.1998. Бюл. № 23), который принят за прототип и который состоит из платформы в одноосном подвесе, с осью которой кинематически связан стабилизирующий мотор, установленного на платформе трёхстепенного гироскопа с датчиками угла и датчиками момента по каждой оси его подвеса, причём один из датчиков угла через усилитель арретирования подключён к соответствующему датчику момента, датчик угла, установленный на оси, параллельной оси подвеса платформы, подключён по типу отрицательной обратной связи к одному из входов усилителя стабилизации, выход которого соединён с обмоткой управления стабилизирующего мотора, последовательно с которой включён резистор, выход которого по типу положительной обратной связи подключён ко второму входу усилителя стабилизации.
Введение положительной обратной связи по току стабилизирующего мотора позволяет повысить демпфирование относительно оси стабилизации, что упрощает синтез корректирующего звена.
Однако ИГС, принятый за прототип, выполняет только одну функцию - стабилизацию платформы относительно оси ее подвеса.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в расширение функциональных возможностей с одновременным повышением точностью работы одноосного индикаторного горизонтального гиростабилизатора при движении объекта на вираже (в кривых).
Технический результат достигается тем, что в одноосном индикаторном горизонтальном гиростабилизаторе, содержащим платформу в одноосном подвесе, с осью которой кинематически связан стабилизирующий мотор, с установленным на ней трехстепенным гироскопом, с осью подвеса наружной рамки которого, расположенной параллельно оси подвеса платформы, кинематически связаны первый датчик угла и первый датчик момента, а с осью подвеса гироузла кинематически связаны второй датчик момента и второй датчик угла, который через усилитель арретирования подключён к входу первого датчика моментов, а первый датчик угла по типу отрицательной обратной связи подключён к первому входу усилителя стабилизации, второй вход которого по типу положительной обратной связи подключён к выходу дополнительного резистора, включённого в цепь управления стабилизирующим мотором, вход которого соединён с выходом усилителя стабилизации, новым является то, что в гиростабилизатор введена цепь компенсации, состоящая из датчика угловой скорости с осью чувствительности, перпендикулярной плоскости платформы, выход которого соединён с первым входом блока умножения, на второй вход которого подключён датчик линейной скорости объекта, а выход блока умножения подключён на первый вход сумматора, второй вход которого соединён с выходом маятникового чувствительного элемента, установленного на платформе с возможностью измерения угла её отклонения от плоскости горизонта, и выход сумматора, являющийся выходом цепи компенсации, соединён с входом усилителя коррекции, выход которого подключён к входу второго датчика моментов, при этом параметры цепи компенсации связаны соотношением
где 
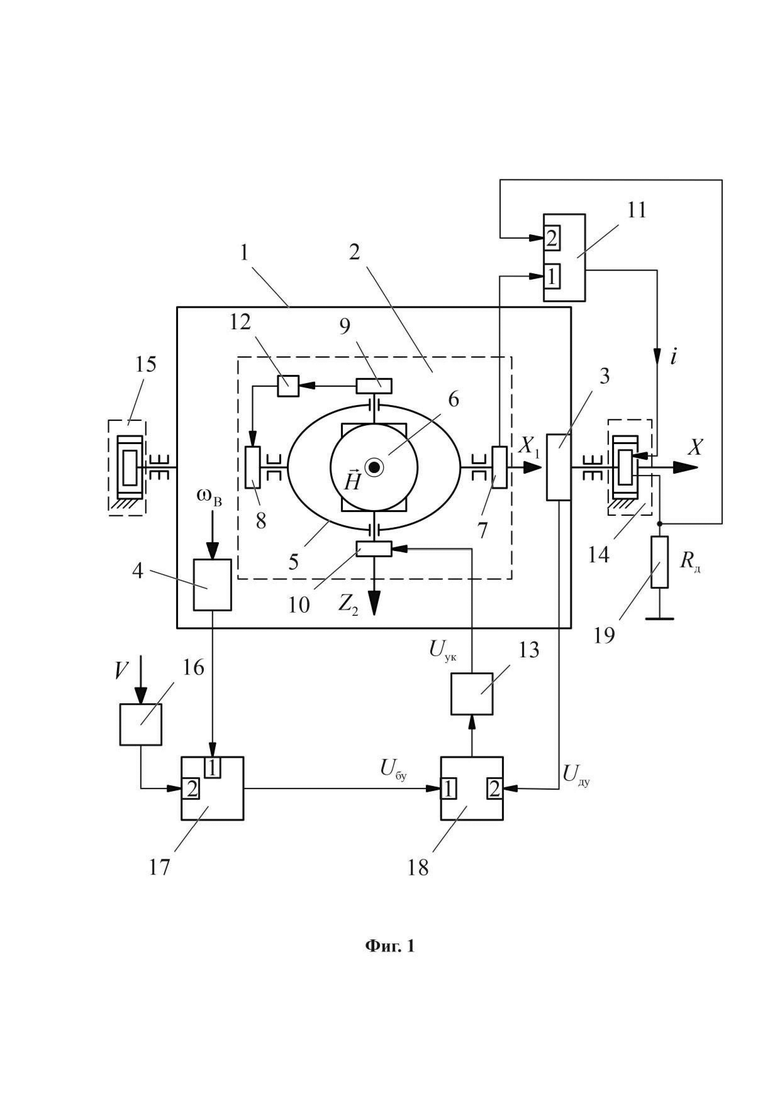
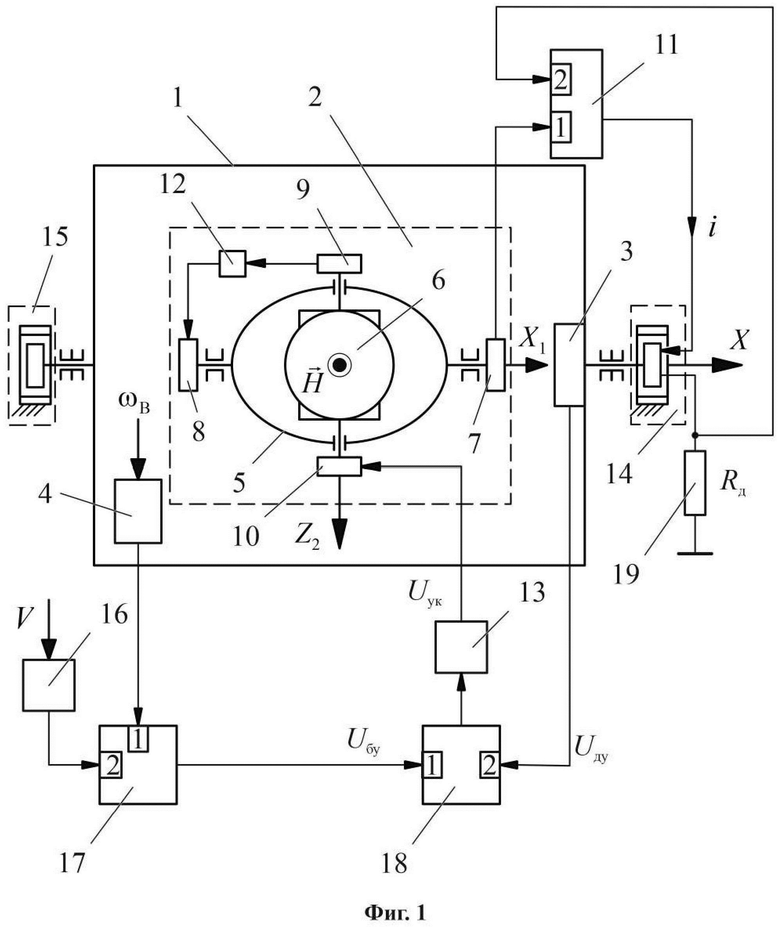
Сущность изобретения поясняется фиг.1, на которой приведена схема одноосного индикаторного горизонтального гиростабилизатора (ОИГГС). На фиг. 1 приняты следующие обозначения:
1 - платформа ОИГГС;
2 - трёхстепенной гироскоп;
3 - маятниковый чувствительный элемент;
4 - датчик угловой скорости;
5 - наружная рамка;
6 - гироузел трёхстепенного гироскопа;
7 - первый датчик угла;
8 - первый датчик момента;
9 - второй датчик угла;
10 - второй датчик момента;
11 - усилитель стабилизации;
12 - усилитель арретирования;
13 - усилитель коррекции;
14 - стабилизирующий мотор;
15 - системный датчик угла;
16 - датчик линейной скорости объекта;
17 - блок умножения;
18 - сумматор;
19 - резистор 










В соответствии с фиг. 1 ОИГГС состоит из платформы 1 в одноосном подвесе, на которой установлен трёхстепенной гироскоп 2 с осью подвеса 


Пояснение роли положительной обратной связи
Запишем уравнение моментов относительно оси стабилизации Х и уравнение контура стабилизации с учётом ПОС

где (1) - уравнение моментов; (2) - уравнение момента стабилизирующего мотора 14; (3) - приведённое уравнение контура стабилизации; 







где 


Для обеспечения горизонтального положения платформы служит контур коррекции, состоящий из последовательно включённых маятникового чувствительного элемента 3, сумматора 18 (второй вход), усилителя коррекции 13 и второго датчика момента 10. При отклонении платформы от плоскости горизонта маятниковый чувствительный элемент 3 зафиксирует это отклонение и сигнал с маятникового чувствительного элемента, усиленный в усилителе коррекции 13, поступит на второй датчик момента 10, который создаст момент такого направления, чтобы кинетический момент 
Пояснение работы цепи компенсации.
При движении объекта на вираже маятниковый чувствительный элемент 3 выдаёт сигнал в виде

где 

Цепь коррекции формирует сигнал, компенсирующий влияние центростремительного ускорения, и выходной сигнал усилителя коррекции 13 будет равен

где 
то выходной сигнал усилителя коррекции будет равен
в котором отсутствует влияние центростремительного ускорения, и, соответственно, будет отсутствовать виражная погрешность.
Выходным сигналом ОИГГС, который пропорционален углу отклонения платформы от плоскости местного горизонта, является сигнал системного датчика угла 15, ротор которого жёстко соединён с осью подвеса платформы 1, а статор с - корпусом прибора.
Пример реализации.
1. В качестве трёхстепенного гироскопа можно использовать МГТУ различных серий, двухканальный гироскоп Д7, различные типы динамически настраиваемых гироскопов, например, серии ГВК.
2. В качестве маятникового чувствительного элемента, например, акселерометр АТ-1104 с диапазоном (1÷2)g.
3. В качестве датчика угловой скорости микромеханический гироскоп, например, марки ADXRS646 Analog Devices или волоконно-оптический гироскоп ВГ1703А производства «Физоптики».
4. В качестве усилителя - операционные усилители, которые имеют инвертирующий и не инвертирующий входы.
5. В качестве стабилизирующего мотора - моментный двигатель постоянного тока с возбуждением от постоянных магнитов. Параметры:

6. Датчик линейной скорости объекта. Для путеизмерителя либо тахогенератор, либо цифровой датчик оборотов, связанный с осью колёсной пары.
Реализация условия (5)
Возьмём резистор 




Условие статической точности
Из уравнения (4) для статического режима установившееся значение угла отклонения платформы от плоскости местного горизонта при выше заданных параметрах и 

Для путеизмерителя погрешность определения превышения рельсовых ниток в поперечной плоскости составляет в угловой мере 4 угл. мин.
Реализация условия (6) – условия компенсации
Крутизна 


Таким образом, на базе одноосного индикаторного гиростабилизатора разработана схема одноосного индикаторного горизонтального гиростабилизатора, в котором с помощью цепи компенсации повышена точность работы устройства при движении объекта на вираже.
Применение данной схемы построения одноосного индикаторного горизонтального гиростабилизатора позволяет расширить функциональные возможности индикаторных гиростабилизаторов и повысить точность работы при движении объекта по криволинейным участкам пути. Предлагаемый гиростабилизатор может найти применение в малогабаритных путеизмерителях, определяющих качество железнодорожного полотна по одному из важных параметров - превышению рельсовых ниток по уровню в поперечной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Индикаторный гиростабилизатор | 2023 |
|
RU2796398C1 |
| Индикаторный гиростабилизатор | 2024 |
|
RU2829814C1 |
Изобретение относится к гироскопической технике и может найти применение в составе одноосных или двухосных гировертикалей, построенных на базе индикаторных гироскопических стабилизаторов и совершающих движение, близкое к горизонтальному. Одноосный индикаторный горизонтальный гиростабилизатор содержит трёхстпенной гироскоп 2, установленный на платформу 1 в одноосном подвесе таким образом, чтобы ось 


Одноосный индикаторный горизонтальный гиростабилизатор, содержащий платформу в одноосном подвесе, с осью которой кинематически связан стабилизирующий мотор, с установленным на ней трёхстепенным гироскопом, с осью подвеса наружной рамки которого, расположенной параллельно оси подвеса платформы, кинематически связаны первый датчик угла и первый датчик момента, а с осью подвеса гироузла кинематически связаны второй датчик момента и второй датчик угла, который через усилитель арретирования подключён к входу первого датчика моментов, а первый датчик угла по типу отрицательной обратной связи подключён к первому входу усилителя стабилизации, второй вход которого по типу положительной обратной связи подключён к выходу дополнительного резистора, включённого в цепь управления стабилизирующим мотором, вход которого соединён с выходом усилителя стабилизации, отличающийся тем, что в гиростабилизатор введена цепь компенсации, состоящая из датчика угловой скорости с осью чувствительности, перпендикулярной плоскости платформы, выход которого соединён с первым входом блока умножения, на второй вход которого подключён датчик линейной скорости объекта, а выход блока умножения подключён на первый вход сумматора, второй вход которого соединён с выходом маятникового чувствительного элемента, установленного на платформе с возможностью измерения угла отклонения платформы от плоскости горизонта, а выход сумматора, являющийся выходом цепи компенсации, соединён с входом усилителя коррекции, выход которого подключён к входу второго датчика моментов, при этом параметры цепи компенсации связаны соотношением
где 
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 1979 |
|
SU790923A1 |
| Одноосный гиростабилизатор | 1990 |
|
SU1779930A1 |
| US 7469479 B2, 30.12.2008. | |||

