Изобретение относится к устройствам для перегрузки и кантования штучных грузов, транспортируемых конвейерами, и может быть использовано для перегрузки грузов в одной плоскости со сменой направления движения на обратное в разных уровнях.
Известны перегрузочные устройства для штучных грузов, включающие станину и снабженный роликами и приводом поворота стол, закрепленный на стержне, с возможностью накатывания на стол груза, транспортируемого роликовым конвейером, с последующим поворотом стержня со столом в горизонтальной плоскости и разворотом стола относительно стержня в зоне разгрузки груза (Спиваковский А. О. , Дьячков В.К. Транспортирующие машины, М., Машиностроение, 1968, с. 398-400, рис. 285).
Недостатком известных устройств является невозможность перегрузки грузов в вертикальной плоскости.
Известно перегрузочное устройство-кантователь для однотипных штучных грузов (прототип), состоящее из станины, Г-образного поворотного в вертикальной плоскости на опорных катках стола, снабженного роликами, привода поворота, ограничителей поворота, подающего и приемного конвейеров (там же, с. 400-401, рис. 286).
Однако недостатками известного устройства являются невозможность его использования для перегрузки грузов со сменой направления их движения на обратное, а также наличие специального привода, усложняющего и удорожающего конструкцию.
Задачами изобретения являются обеспечение возможности смены направления груза при его перегрузке на обратное и упрощение конструкции.
Поставленные задачи решаются за счет того, что в устройстве для перегрузки штучных грузов, содержащем станину, поворотный в вертикальной плоскости Г-образный стол, включающий полку с роликами и перпендикулярную к ней стенку, ограничители поворота, подающий и приемный конвейеры, стол на станине установлен с помощью горизонтальной оси, размещенной над плоскостью полки стола на стенке, на которой шарнирно закреплен грузовой рычаг с противовесом на конце со стороны, противоположной полке стола, и с возможностью поворота рычага в вертикальной плоскости посредством винтовой тяги, связывающей дополнительно рычаг со стенкой стола, с образованием острого угла между грузовым рычагом и плоскостью полки стола, при этом величина этого угла выбрана из условия уравновешивания устройства противовесом в моменты накатывания груза на полку с подающего конвейера и схода груза, а полки на приемный конвейер, а плоскость полки стола в исходном положении и конечном положении образует с горизонтальной плоскостью углы наклона, большие угла трения груза при его движении по роликам в противоположных направлениях, и размещена в исходном положении ниже несущей плоскости подающего конвейера. Кроме того, на оси поворота стола может быть установлено подторможивающее приспособление.
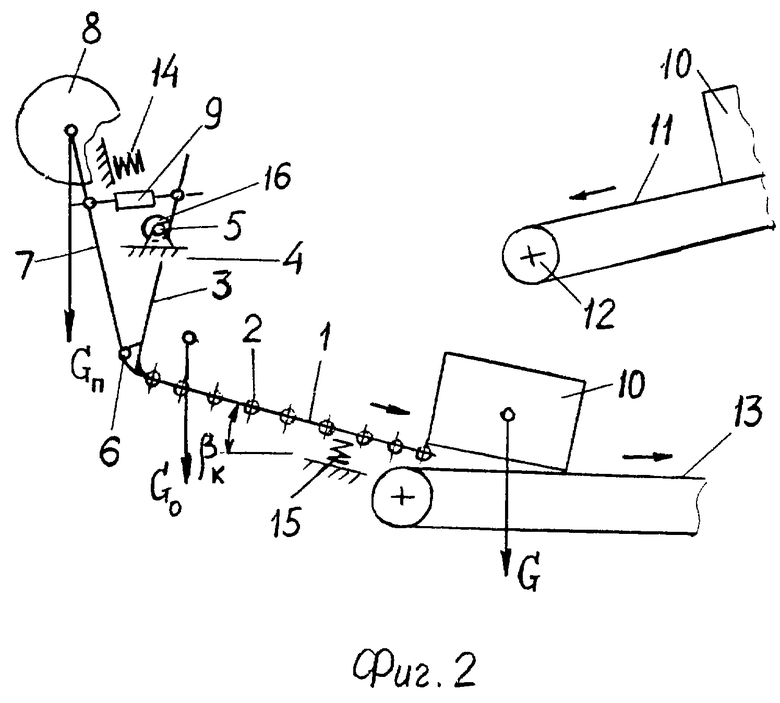
Устройство для перегрузки штучных грузов представлено на фиг. 1 - положение при накатывании груза, на фиг. 2 - положение при разгрузке груза.
Устройство состоит из поворотного в вертикальной плоскости Г-образного стола, включающего полку 1 с роликами 2 и перпендикулярную к ней стенку 3. Стол на станине 4 установлен с помощью горизонтальной оси 5, размещенной над плоскостью полки 1 стола на стенке 3. На стенке 3 также шарнирно (6) закреплен грузовой рычаг 7 с противовесом 8 на конце со стороны, противоположной полке 1 стола, и с возможностью поворота рычага 7 в вертикальной плоскости вокруг шарнира 6.
Грузовой рычаг 7 и стенка 3 дополнительно связаны между собой винтовой тягой 9. Грузовой рычаг 7 с плоскостью полки 1 стола образует острый угол α. Плоскость полки 1 стола в исходном и конечном положениях образует с горизонтальной плоскостью углы наклона β0 и βк, большие угла трения груза 10 по роликам 2 при движении груза в противоположных направлениях, и размещена в исходном положении ниже несущей плоскости 11 подающего конвейера 12. Величина угла α между грузовым рычагом 7 и плоскостью стола (полки 1) выбрана из условия уравновешивания устройства противовесом 8 в моменты накатывания груза 10 на полку 1 с подающего конвейера 12 и схода груза 10 с полки 1 на приемный конвейер 13.
Условие уравновешивания устройства рассчитывают при совместном действии сил тяжести груза G, самого устройства Go и противовеса Gп.
Крайние положения полки 1 фиксируются ограничителями поворота 14 (в исходном положении) и 15 (в момент разгрузки груза 10 на приемный конвейер 13). Ограничители могут быть выполнены в виде пружин или из эластичного материала. На оси 5 может быть установлено подтормаживающее приспособление 16. В качестве подающего и приемного конвейеров могут быть использованы ленточные (показаны на чертеже) или роликовые конвейеры.
Устройство действует следующим образом. Штучный груз 10 с подающего конвейера 12 накатывается на ролики 2 наклоненной под углом β0 полки 1. До момента полного размещения груза 10 на полке 1 стол остается неподвижным под действием крутящего момента, создаваемого противовесом 8. Как только груз 10 полностью перейдет на полку 1, стол под действием неуравновешенной составляющей веса G груза начнет поворачиваться по часовой стрелке вокруг оси 5. Одновременно груз 10 будет продолжать накатываться на полку 1 до момента, когда угол наклона полки 1 к горизонту не сравняется с углом трения при движении груза 10 по роликам 2 полки 1. Груз 10 останавливается и при дальнейшем повороте стола по часовой стрелке начнет двигаться в обратном направлении, скатывается под действием своего веса G по роликам 2. Дойдя до ограничителя 15, стол останавливается под углом к горизонту βк (большим угла трения), а груз 10 сходит с роликов 2 полки 1 на приемный конвейер 13. Причем до самого последнего момента (показанного на фиг. 2), пока груз 10 не сойдет с полки 1, крутящего момента, создаваемого противовесом 8, будет не достаточно для поворота стола в обратном направлении.
Только после схода грузов 10 стол под действием неуравновешенного крутящего момента, создаваемого противовесом 8, начинает поворачиваться вокруг оси 5 против часовой стрелки (в обратном направлении), пока не займет положение, показанное на фиг. 1.
Затормаживающее приспособление 16 уменьшает угловую скорость поворота стола при скатывании груза 10 и при возвращении стола в исходное положение, а пружинные ограничители 14 и 15 дополнительно уменьшают ударные нагрузки на элементы конструкции при остановках стола в нижнем и верхнем положениях.
Цикл повторяется, когда к устройству подходит следующий груз, транспортируемый подающим конвейером 12. Устройство работает в автоматическом режиме и управляется весом самого груза, перегружаемого с подающего на приемный конвейер.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ В СЛУЧАЕ ЕЕ ОБРЫВА | 1992 |
|
RU2043284C1 |
| АГРЕГАТ ДЛЯ СУШКИ БРИКЕТОВ | 1994 |
|
RU2092755C1 |
| АГРЕГАТ ДЛЯ ИЗГОТОВЛЕНИЯ ТОПЛИВНЫХ БРИКЕТОВ | 1992 |
|
RU2042523C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ СТРОИТЕЛЬНОЙ АРМАТУРЫ | 1998 |
|
RU2145264C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ТРАМВАЙНЫХ ПУТЕЙ | 1998 |
|
RU2137878C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КАМЕННЫХ ПЛИТ | 1998 |
|
RU2146588C1 |
| ШАГАЮЩАЯ УСТАНОВКА ДЛЯ ВЗЯТИЯ ПРОБ СО ДНА МОРЕЙ И ОКЕАНОВ | 1994 |
|
RU2087718C1 |
| КОМБАЙН ДЛЯ ОБРАЗОВАНИЯ ГОРНЫХ ВЫРАБОТОК | 1991 |
|
RU2017970C1 |
| ПРОМЕЖУТОЧНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 1992 |
|
RU2043282C1 |
Изобретение относится к устройствам для перегрузки и кантования штучных грузов и может быть использовано для перегрузки грузов в одной плоскости со сменой направления движения на обратное в разных уровнях. Изобретение характеризуется тем, что стол на станине установлен с помощью горизонтальной оси, размещенной над плоскостью полки стола на стенке, на которой шарнирно закреплен грузовой рычаг с противовесом на конце со стороны, противоположной полке стола, с возможностью поворота рычага в вертикальной плоскости посредством винтовой тяги, дополнительно связывающей рычаг со стенкой стола, с образованием острого угла между грузовым рычагом и плоскостью полки стола, при этом величина угла выбрана из условия уравновешивания устройства противовесом в моменты накатывания груза на полку с подающего конвейера и схода груза с полки на приемный конвейер, а плоскость полки стола в исходном положении и конечном положении образует с горизонтальной плоскостью углы наклона, больше угла трения груза при его движении по роликам в противоположных направлениях, и размещена в исходном положении ниже несущей поверхности подающего конвейера, а на оси поворота установлено подтормаживающее приспособление. Отличительные признаки изобретения позволяют осуществлять смену направления движения груза при его перегрузке на обратное без остановки груза и упрощение конструкции устройства. 1 з.п.ф-лы, 2 ил.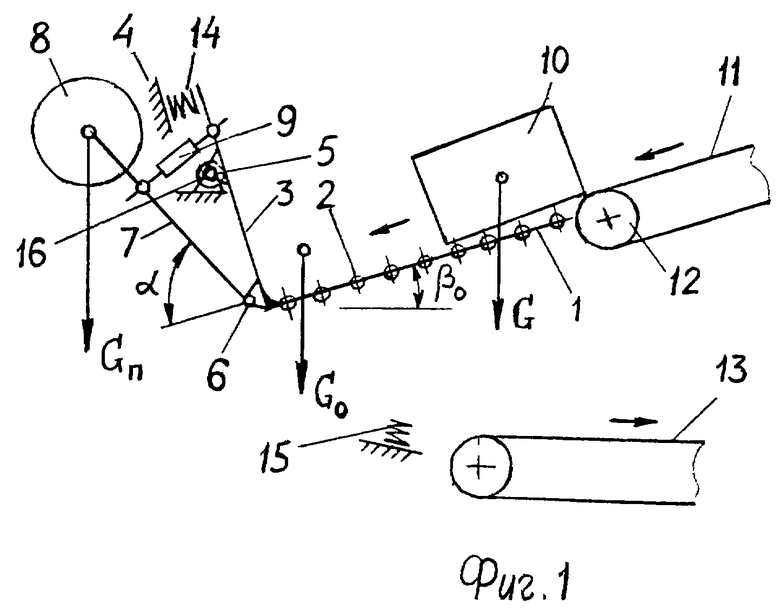
| Спиваковский А.О., Дьячков В.К | |||
| Транспортирующие машины | |||
| - М.: Машиностроение, 1968, с.398-400, рис.285 | |||
| Полуавтоматическая линия для подачи целлюлозы к гидроразбивателю | 1978 |
|
SU878701A1 |
| БАЙОНЕНТНОЕ СОЕДИНЕНИЕ | 1992 |
|
RU2074991C1 |
| СПОСОБ ГРАВИТАЦИОННОГО ИЗВЛЕЧЕНИЯ МЕЛКОГО И ТОНКОГО ЗОЛОТА И КОМПЛЕКС ДЛЯ ИЗВЛЕЧЕНИЯ ЗОЛОТА | 2015 |
|
RU2601345C1 |
| DE 4122214 А1, 14.01.1993 | |||
| Способ анафорезного покрытия подогревателей катодов радиоламп | 1958 |
|
SU122817A1 |
