Техническое решение относится к обработке металлов давлением и, в частности, может быть использовано при производстве проволоки, кабеля или проводов в кабельной промышленности.
Основными узлами устройства для стабилизации натяжения проволоки при намотке или размотке являются датчик состояния натяжения проволоки и исполнительный механизм [1].
Известно устройство для стабилизации натяжения, содержащее гидромуфту [2] . Недостаток этого устройства в применении гидравлики, что определено сложностью в эксплуатации и ненадежностью.
Известно устройство для разматывания, содержащее в качестве исполнительного механизма вариатор [3]. Недостаток этого устройства в сложности и ненадежности этой механической конструкции.
Известен регулятор намотки проволоки на катушку, содержащий виткоукладчик, исполнительный механизм, состоящий из асинхронного двигателя, индукторной муфты скольжения, коробки скоростей, клиноременной передачи и тормоза [4] . Недостаток этого устройства в сложности конструкции, в трудности обеспечения качественной намотки, так как регулирование намотки на изменяющийся диаметр катушки производят за счет муфты скольжения, которая не обеспечивает стабильности вращения.
Известен намоточный аппарат с исполнительным механизмом, где в качестве электропривода используют асинхронный двигатель с фазным ротором [5]. Недостатком этого устройства является сложность в конструкции, наладке и эксплуатации электрооборудования системы управления асинхронного двигателя с фазным ротором.
Известен также механизм слежения, состоящий из роликов и груза-противовеса [6] . Недостаток этого механизма в ненадежности работы и, в случае наматывания проволоки другого диаметра, в необходимости менять массу всего механизма слежения.
Наиболее близким по технической сущности и достигаемым результатам к предлагаемому техническому решению является устройство для стабилизации натяжения проволоки при намотке [7]. Указанное устройство для стабилизации натяжения проволоки на катушке при рассогласовании скоростей волочения и намотки воздействует сигналом датчика длины петли петлеобразователя на электропривод, изменяя тем самым скорость катушки для восстановления статического равновесия скоростей волочения и намотки и поддержания заданного значения натяжения проволоки.
Функциональная схема устройства для стабилизации натяжения проволоки при намотке [7] включает в себя датчик длины петлеобразователя, исполнительный механизм, дифференциатор второго порядка, подключенный на вход датчика длины петли, при этом его выход соединен со ходом множительного устройства, подключенного на вход исполнительного механизма и умножающего поступающий сигнал на постоянную величину, пропорциональную массе груза петлеобразователя, приходящейся на одну ветвь.
Недостатком указанного устройства для стабилизации является его сложность в конструкции, обусловленная наличием разнообразных функциональных устройств, и его работа только в режиме намотки проволоки на катушку.
Задачей предлагаемого технического решения является упрощение конструкции, обеспечение стабильности натяжения проволоки как при ее намотке на катушку, так и при ее размотке с катушки, снижение энергоемкости исполнительного механизма.
Поставленная задача достигается тем, что:
1. В функциональной схеме устройства для стабилизации натяжения проволоки при намотке или размотке, содержащей датчик длины петли петлеобразователя, исполнительный механизм, состоящий из катушки и электропривода, в качестве электропривода содержат реверсивный преобразователь тока с электродвигателем и дополнительно используют функциональный преобразователь сигнала с датчика петли в двухполярный аналоговый сигнал, подсоединенный входом к выходу датчика длины петли, а выходом - к входу реверсивного преобразователя.
2. В функциональной схеме по п. 1 в качестве реверсивного преобразователя тока используют реверсивный тиристорный преобразователь постоянного тока.
3. В функциональной схеме по п. 1 в качестве реверсивного преобразователя тока используют реверсивный частотный преобразователь переменного тока.
4. В функциональной схеме по п. 1 в качестве электродвигателя используют электродвигатель постоянного тока.
5. В функциональной схеме по п. 1 в качестве электродвигателя используют электродвигатель переменного тока.
На чертеже приведена функциональная схема построения устройства для стабилизации натяжения проволоки при намотке или размотке, где:
1 - катушка;
2 - реверсивный преобразователь тока с электродвигателем;
3 - функциональный преобразователь сигнала с датчика петли в двухполярный аналоговый сигнал;
4 - датчик длины петли;
5 - петлеобразователь;
6 - груз;
Uвх - двухполярный аналоговый сигнал управления;
Vл.в. - линейная скорость волочения;
Vл.н. - линейная скорость намотки;
Vл.т. - линейная скорость тяги;
Vл.р. - линейная скорость размотки.
Устройство для стабилизации натяжения проволоки при намотке или размотке работает следующим образом:
Направление вращения и линейная скорость катушки 1 зависит от того, какое направление включено для работы у реверсивного преобразователя тока с электродвигателем, которое, в свою очередь, зависит от полярности и величины аналогового сигнала управления Uвх, формирующегося в результате преобразования функциональным преобразователем 3 сигнала с датчика длины петли 4 петлеобразователя 5.
Uвх формируется следующим образом:
при нахождении датчика 4 на середине всей длины петлеобразователя 5 Uвх = 0;
при нахождении датчика 4 ниже или выше середины всей длины петлеобразователя 5 Uвх > 0 (либо Uвх < 0) или Uвх < 0 (либо Uвх > 0) соответственно, т.е. Uвх разнополярно в зависимости от положения датчика 4 относительно середины длины петлеобразователя 5.
Рассмотрим работу устройства для стабилизации натяжения проволоки при намотке на катушку 1. Результатом соответствия линейной скорости волочения Vв.л. и намотки Vл.н. является серединное положение датчика 4 петлеобразователя 5, при котором Uвх ~ 0. Начальные движения проволоки и груза 6 на фиг. 1 обозначены сплошной стрелкой. Допустим, при Vл.в. > Vл.н. груз 6 и датчик 4 будут перемещаться вниз относительного серединного положения, формируя при этом на выходе функционального преобразователя 3 Uвх > 0, в результате чего электродвигатель будет увеличивать Vл.н. до соответствия с Vл.в.. Допустим, при Vл.н. > Vл.в., например, когда увеличивается диаметр намотанной проволоки на катушке 1, груз 6 и датчик 4 будут перемещаться вверх относительно серединного положения, формируя при этом на выходе функционального преобразователя 3 Uвх < 0, в результате чего электродвигатель будет уменьшать Vл.н. до соответствия с Vл.в., включаясь в тормозной режим и рекуперируя электроэнергию в питающую сеть.
Рассмотрим теперь работу устройства для стабилизации натяжения проволоки при размотки с катушки 1. Результатом соответствия линейной скорости тяги Vл.т. и размотки Vл.р. также является серединное положение датчика 4 петлеобразователя 5, при котором Uвх ~ 0. Начальные движения проволоки и груза 6 на фиг. 1 обозначены пунктирной стрелкой. Допустим, при Vл.т. > Vл.р. груз 6 и датчик 4 будут перемещаться вверх относительного серединного положения, формируя при этом на выходе функционального преобразователя 3 Uвх < 0, в результате чего электродвигатель будет увеличивать Vл.р. до соответствия с Vл.т.. Допустим, при Vл.р. > Vл.т., например, когда проволока была неравномерно намотана на катушку 1 до размотки, груз 6 и датчик 4 будут перемещаться вниз относительно серединного положения, формируя при этом на выходе функционального преобразователя 3 Uвх > 0, в результате чего электродвигатель будет уменьшать Vл.р. до соответствия с Vл.т., включаясь в тормозной режим и рекуперируя электроэнергию в питающую сеть.
Масса груза 6, как и катушка с проволокой 1, является нагрузкой для электродвигателя. При изменении величины массы груза будет изменяться величина натяжения проволоки при ее намотке или размотке. Разнополярные величины Uвх при нахождении датчика 4 в крайнем верхнем и в крайнем нижнем положении длины петлеобразователя 5, равно и когда Uвх ~ 0, зависят от требуемой линейной скорости и степени натяжения проволоки при намотке или размотке, а также от требуемой динамики и эксплуатационных режимов работы исполнительного механизма.
В данном устройстве упрощена конструкция, осуществляется повышение стабильности натяжения проволоки не только при ее намотке, но и при ее размотке, а использование при этом тормозных режимов реверсивного автоматизированного электропривода постоянного или переменного тока обеспечивает снижение энергоемкости исполнительного механизма.
Т. о., применение предлагаемого технического решения позволяет упростить конструкцию устройства и повысить при этом стабильность натяжения проволоки как при ее намотке на катушку, так и при ее размотке с катушки, а также снизить энергоемкость исполнительного механизма.
Источники информации
1. Перельмутер В. М. , Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. М.: Энергоатомиздат, 1988, стр.225-241.
2. Описание изобретения к авт.св. СССР N 218794, М.кл. B 21 C 47/04, 1968.
3. Описание изобретения к авт.св. СССР N 517347, М.кл. B 21 C 47/04, 1976.
4. Описание изобретения к авт.св. СССР N 837447, М.кл. B 21 C 47/04, 1981.
5. Описание изобретения к авт.св. СССР N 900920, М.кл. B 21 C 47/00, 1982.
6. Описание изобретения к авт.св. СССР N 1011294, М.кл. B 21 C 47/04, 1983.
7. Описание изобретения к авт.св. СССР N 490524, М.кл. B 21 C 47/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации напряжения проволоки при намотке | 1974 |
|
SU490524A1 |
| Устройство для регулирования натяжения проволоки при намотке | 1982 |
|
SU1021488A1 |
| Электропривод намоточного станка | 2018 |
|
RU2704493C1 |
| Устройство для управления размоткой и намоткой линии непрерывного действия с накопителями петлевого типа | 1977 |
|
SU736324A1 |
| ПРИВОДНОЙ КАБЕЛЬНЫЙ БАРАБАН | 2020 |
|
RU2743414C1 |
| Устройство для стабилизации натяжения рулонного материала | 1987 |
|
SU1586983A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ СДВОЕННОГО НАМОТОЧНОГО АППАРАТА | 1973 |
|
SU383670A1 |
| Устройство для намотки и размотки длинномерных изделий | 1981 |
|
SU1011294A1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
Технический результат - упрощение конструкции, обеспечение стабильности натяжения проволоки как при ее намотке на катушку, так и при ее размотке с катушки, снижение энергоемкости исполнительного механизма. Функциональная схема устройства для стабилизации натяжения проволоки при намотке или размотке, включающая датчик длины петли петлеобразователя, исполнительный механизм, состоящий из катушки и электропривода, в качестве электропривода содержит реверсивный тиристорный преобразователь постоянного тока с электродвигателем постоянного тока или реверсивный частотный преобразователь переменного тока с электродвигателем переменного тока. Дополнительно используют функциональный преобразователь сигнала с датчика петли в двухполярный аналоговый сигнал, подключенный входом к выходу датчика длины петли, а выходом - к входу реверсивного тиристорного преобразователя постоянного тока или входу реверсивного частотного преобразователя переменного тока. Применение изобретения позволяет упростить конструкцию устройства и повысить при этом стабильность натяжения проволоки как при ее намотке на катушку, так и при ее размотке с катушки, а также снизить энергоемкость исполнительного механизма. 4 з.п. ф-лы, 1 ил.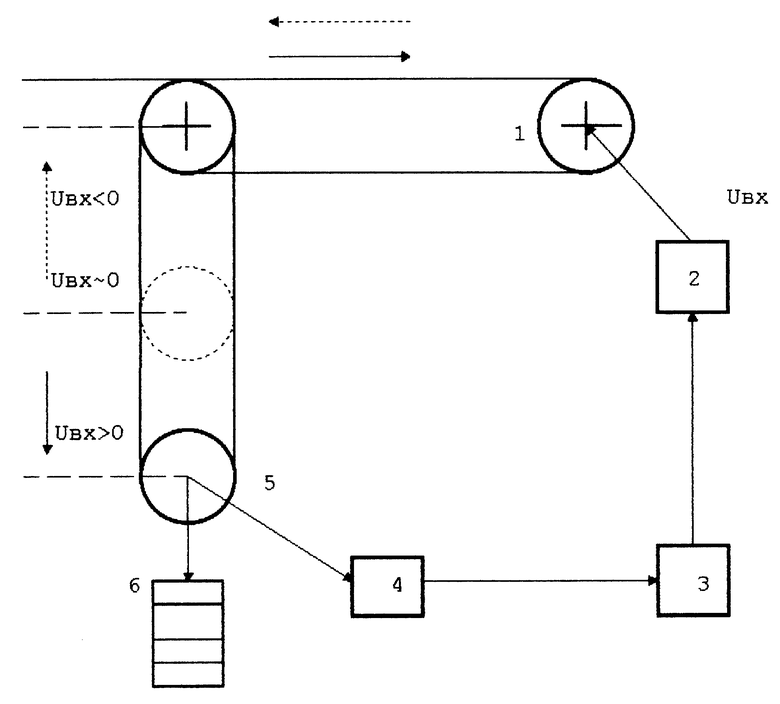
| Устройство для стабилизации напряжения проволоки при намотке | 1974 |
|
SU490524A1 |
| Кабельный ввод | 1985 |
|
SU1343450A1 |
| US 3831412, 27.08.1974 | |||
| Датчик-компенсатор для натяжения проволоки | 1973 |
|
SU572185A3 |
| ЛИОФИЛИЗИРОВАННАЯ АНТИГЕРПЕТИЧЕСКАЯ ВАКЦИНА | 2002 |
|
RU2225223C1 |
