Изобретение относится к области транспортного машиностроения, в частности к рулевым механизмам наземных транспортных средств, а также к взлетно-посадочным устройствам летательных аппаратов.
Известные рулевые механизмы в подавляющем ряде случаев разрабатывались на основе зубчатой передачи, а, учитывая закон изменения центробежной силы от скорости движения,
Pц = mV2/r
где V - скорость транспортного средства;
r - радиус поворота;
m - масса, приходящаяся на управляемую опору транспортного средства,
при изменении траектории движения (радиуса поворота) транспортного средства, для его управления необходима зависимость угла поворота управляемых колес от угла поворота рулевого вала столь значительной нелинейности (характеристика близка к параболической), что конструкции рулевых механизмов с переменным передаточным отношением на основе зубчатой передачи, в которых это отношение варьируется в небольших пределах, для решения такой задачи неприемлемы, так как изначально, по принципу своего действия не предназначены для получения плавного изменения передаточного отношения, а попытки осуществить это, приводят к значительному усложнению конструкций, при этом, однако, реализовать требуемую зависимость не представляется возможным. К тому же усложнение конструкций ведет к снижению надежности и в совокупности с увеличением стоимости, препятствует их практическому применению (см. патент N 900798, кл. B 62 D 3/02, 1982 г., бюл. N 3; авт. свид. СССР N 11423484, кл. B 62 D 3/12, 1985 г., бюл. N 8).
Известен рулевой механизм транспортного средства, содержащий механическую передачу с соединенным с рулевым валом при помощи винтовой передачи ведущим элементом, выполненным в виде гайки с возможностью продольного перемещения вдоль винта и снабженным двумя пальцами, а также расположенным на валу сошки приводным элементом, находящимся в зацеплении с пальцами гайки и выполненным в виде двухвильчатого кривошипа с возможностью поворота в обе стороны от среднего положения вокруг оси вала сошки, кинематически связанной с управляемыми колесами. В результате взаимодействия пальцев гайки с двухвильчатым кривошипом, в этом рулевом механизме достигается нелинейная зависимость угла поворота управляемых колес от угла поворота рулевого вала, являющаяся характеристикой рулевого механизма (см. Лысов М.И. Рулевые управления автомобилей. М.: Машиностроение, 1972 г., с. 143, 152).
Недостатком этого рулевого механизма является малая нелинейность характеристики и, при данном принципе взаимодействия элементов конструкции, невозможность получения оптимального начального участка характеристики механизма, а именно этот участок имеет первостепенное значение в формировании значительной нелинейности характеристики рулевого механизма.
Технический результат - улучшение управляемости транспортного средства.
Указанный технический результат достигается тем, что рулевой механизм, содержащий механическую передачу с соединенным с рулевым валом ведущим элементом, выполненным в виде расположенного на валу маятника с возможностью поворота вокруг оси вала в обе стороны от среднего положения и включающим в себя два плеча, снабженные двумя пальцами с возможностью перемещения пальцев по дуге окружности, и кинематически связанным с управляемыми колесами приводным элементом, имеющим возможность продольного перемещения и включающим в себя основание, снабженное двумя выступами, и расположенную на основании между выступами головную часть, торцевая поверхность которой, находящейся в зацеплении с пальцами ведущего элемента, выполнена профилированной, а также тем, что внешние торцевые поверхности выступов выполнены профилированными, а приводной элемент снабжен двумя расположенными рядом с выступами со стороны их внешних торцевых поверхностей дополнительными выступами, что позволяет обеспечить оптимальную нелинейную зависимость угла поворота управляемых колес от угла поворота рулевого вала.
На чертежах представлено:
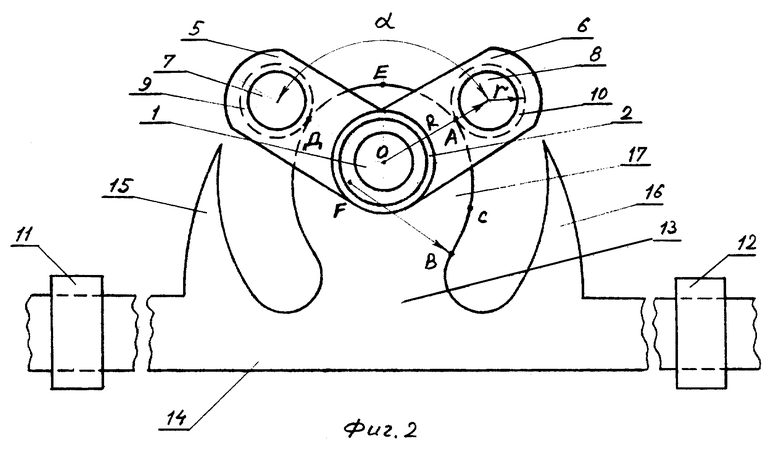
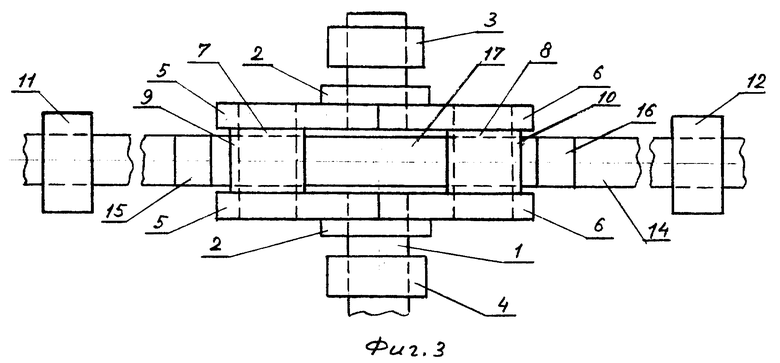
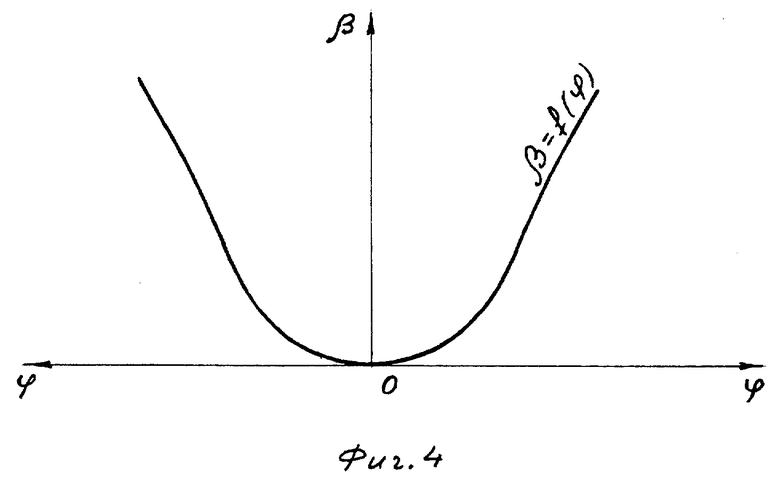
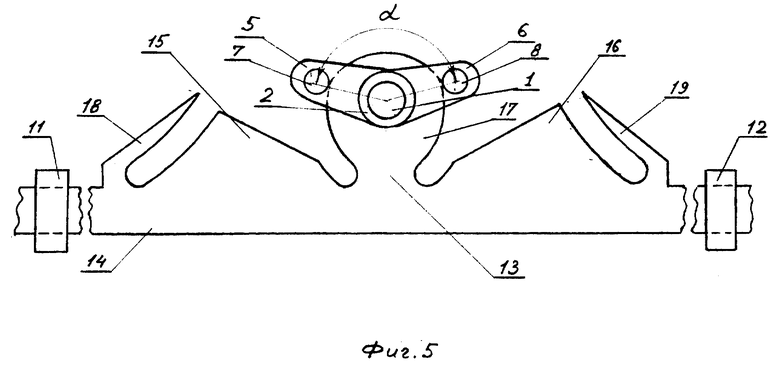
на фиг. 1 схематически показан принцип действия рулевого механизма; на фиг. 2 - конструкция рулевого механизма, вид спереди; на фиг.3 - то же, вид сверху; на фиг. 4 - оптимальная нелинейная зависимость угла β поворота управляемых колес от угла ϕ поворота рулевого вала рулевого механизма; на фиг. 5 - конструкция рулевого механизма с увеличенным диапазоном угла ϕ поворота рулевого вала, вид спереди.
Рулевой механизм транспортного средства содержит механическую передачу с расположенным на валу 1 и соединенным с рулевым валом (на черт. не показан) маятником 2, установленным на подшипниках 3 и 4 в картере (на черт. не показан) рулевого механизма и включающим выполненные спаренными плечи 5 и 6, снабженные пальцами 7 и 8 с втулками 9 и 10, а также установленным там же на подшипниках 11 и 12 приводным элементом 13, включающим основание 14, снабженное выступами 15 и 16, фиксирующими своими внутренними торцевыми поверхностями приводной элемент 13 в плоскости перемещения, и головной частью 17, торцевая поверхность которой выполнена профилированной и находящаяся в зацеплении с пальцами 7 и 8, а внешние торцевые поверхности выступов 15 и 16, показанные на фиг. 5, выполнены профилированными, при этом приводной элемент 13 снабжен дополнительными выступами 18 и 19, расположенными со стороны внешних торцевых поверхностей выступов 15 и 16.
Рулевой механизм работает следующим образом.
При повороте маятника 2, показанного на фиг. 1, вокруг оси вала 1 от среднего положения, палец 7 или 8, совершая движение по дуге окружности, взаимодействует с торцевой поверхностью головной части 17, вызывая перемещение приводного элемента 13 в продольном направлении на расстояние, определяемое выражением
S = R(1-cosϕ),
где S - расстояние перемещения приводного элемента;
R - длина плеча маятника;
ϕ - угол поворота маятника от среднего положения.
Конструкция рулевого механизма, представленного на фиг.2 и 3, позволяет реализовать представленную на графике фиг.4 оптимальную нелинейную зависимость угла β поворота управляемых колес от угла ϕ поворота рулевого вала.
При повороте маятника 2 вокруг оси вала 1 от среднего положения, например по часовой стрелке, палец 8, описывая дугу окружности, взаимодействует с профилированной торцевой поверхностью участка AB головной части 17, которая, в простейшем случае, образована дугой окружности, с центром F, смещенным от оси O вала 1 к основанию 14 и к торцевой поверхности головной части 17, взаимодействующей с пальцем 7, вызывая перемещение приводного элемента 13 влево, при этом линия контакта пальца 8 с головной частью 17 перемещается от точки A до точки B. После достижения пальцем 8 линии контакта с торцевой поверхностью участка AB головной части 17 в точке B, линия контакта перемещается в обратном направлении от точки B до точки C, продолжая перемещать приводной элемент 13 влево. При этом расстояние от оси O вала 1 до линии контакта пальца 8 с торцевой поверхностью участка AB головной части 17 с увеличением угла поворота маятника 2 от среднего положения - увеличивается, что, в совокупности с выбранным профилем участка AB головной части 17, сопровождается все возрастающим приращением расстояния перемещения приводного элемента 13 и может легко варьироваться заданием отношения R/r, где r - внешний радиус втулки пальца; R - расстояние от оси O вала 1 до оси пальца 8, угла α, образованного прямыми, проходящими через ось О вала 1 и оси пальцев 7 и 8, а также профилированием участка AB головной части 17. Выступ 16 позволяет осуществить фиксацию положения приводного элемента 13 в плоскости перемещения в случае, когда палец 7 выходит из зацепления с головной частью 17. Торцевая поверхность DE головной части 17 образована кривой, которую описывает расположенная на минимальном расстоянии от оси O вала 1 внутренняя часть поверхности пальца 7 при его движении по часовой стрелке от среднего положения маятника 2. Для увеличения жесткости конструкции рулевого механизма плечи 5 и 6 выполнены спаренными.
Конструкция рулевого механизма, представленного на фиг.5, позволяет увеличить диапазон угла ϕ поворота рулевого вала.
При выходе пальца 8 из зацепления с головной частью 17, при повороте маятника 2 по часовой стрелке, палец 7 входит в зацепление и взаимодействует с различными точками внешней профилированной торцевой поверхности выступа 16, при этом дополнительный выступ 19 фиксирует положение приводного элемента 13 в плоскости перемещения.
Использование данного рулевого механизма предполагает применение усилителя рулевого привода, так как усилие на рулевой вал возрастает с увеличением угла отклонения управляемых колес от среднего положения. При малых же углах отклонения колес, усилие небольшое, роль усилителя минимальна, передача в среднем положении становится необратимой, что является положительным фактором в вопросе безопасности движения.
По сравнению с известными рулевыми механизмами предлагаемая конструкция позволяет получить требуемую по условию управляемости зависимость угла поворота управляемых колес от угла поворота рулевого вала, что приводит к повышению безопасности движения наземных транспортных средств, так как позволяет увеличить скорость маневра в критической ситуации, объединить два режима работы управляемых опор шасси самолетов "Взлет-посадка" - "Руление" в один, облегчить эксплуатацию транспортных средств и повысить, ввиду простоты конструкции, надежность рулевого механизма, а использование штурвала не только на воздушных, но и в наземных транспортных средствах, так как отпадает необходимость в многооборотном повороте рулевого вала, улучшает обзорность приборной панели и позволяет перенести органы управления с рулевой колонки на штурвал.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система для перегрузки штучных грузов | 1986 |
|
SU1435514A1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Одноколейный двухколесный автоматизированный скутер и способ его использования | 2018 |
|
RU2702365C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2245259C2 |
| СПОСОБ ПОВОРОТА МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309868C1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| Автомобильный реечный рулевой механизм с переменным передаточным отношением (варианты) | 2019 |
|
RU2710066C2 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА ПОВОРОТА КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ОТ ОДНОГО УПОРА ДО ДРУГОГО | 1991 |
|
RU2043940C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2372240C2 |
Изобретение относится к области транспортного машиностроения, в частности к рулевым механизмам транспортных средств как наземных, так и воздушных. Рулевой механизм содержит ведущий элемент, выполненный в виде маятника, расположенного на рулевом валу с возможностью поворота вокруг оси вала в обе стороны от среднего положения и включающего два плеча, снабженных двумя пальцами, и приводной элемент, имеющий возможность продольного перемещения, кинематически связанный с управляемыми колесами и находящийся в зацеплении своей профилированной торцевой поверхностью головной части с пальцами маятника. Рулевой механизм транспортного средства позволяет обеспечить механическим способом оптимальную нелинейную зависимость угла поворота управляемых колес от угла поворота рулевого вала. При этом, учитывая закон изменения центробежных сил, действующих на транспортное средство при изменении траектории движения, с увеличением угла поворота рулевого вала от среднего положения возрастает приращение расстояния перемещения приводного элемента, в связи с чем техническим результатом является высокая управляемость транспортного средства. 1 з.п. ф-лы, 5 ил.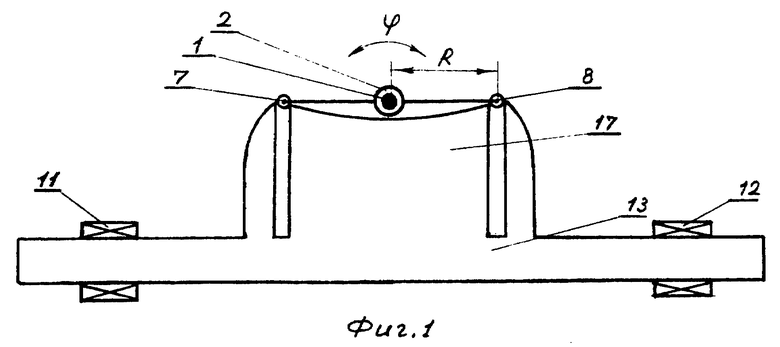
| ЛЫСОВ М.И | |||
| Рулевые управления автомобилей | |||
| - М.: Машиностроение, 1972, с.143, 152 | |||
| Способ интраоперационной ультразвуковой визуализации злокачественных новообразований печени | 2024 |
|
RU2837230C1 |
| Дезинтегратор | 1984 |
|
SU1238788A1 |
| СТАБИЛИЗИРОВАННАЯ КОМПОЗИЦИЯ НА бСИОВЕ-— | 0 |
|
SU390114A1 |
| Способ переработки сернокислого раствора, содержащего примесные элементы | 2016 |
|
RU2630988C1 |
| US 4195858 A, 01.04.1980 | |||
| Состав для маркировки и поверхностного окрашивания изделий радио- и электротехники из силоксановой резины | 1987 |
|
SU1513004A1 |
| Клеевая композиция | 1969 |
|
SU516272A1 |
| GB 2002873 A, 28.02.1979. | |||

