Изобретение относится к машиностроению, в частности к транспортно-перегрузоч- ным агрегатам, и может быть использовано в автоматических поточных линиях для грузов, являющихся объектом обработки или сборки в цехах с безлюдной технологией.
Цель изобретения - повышение точности перегрузки.
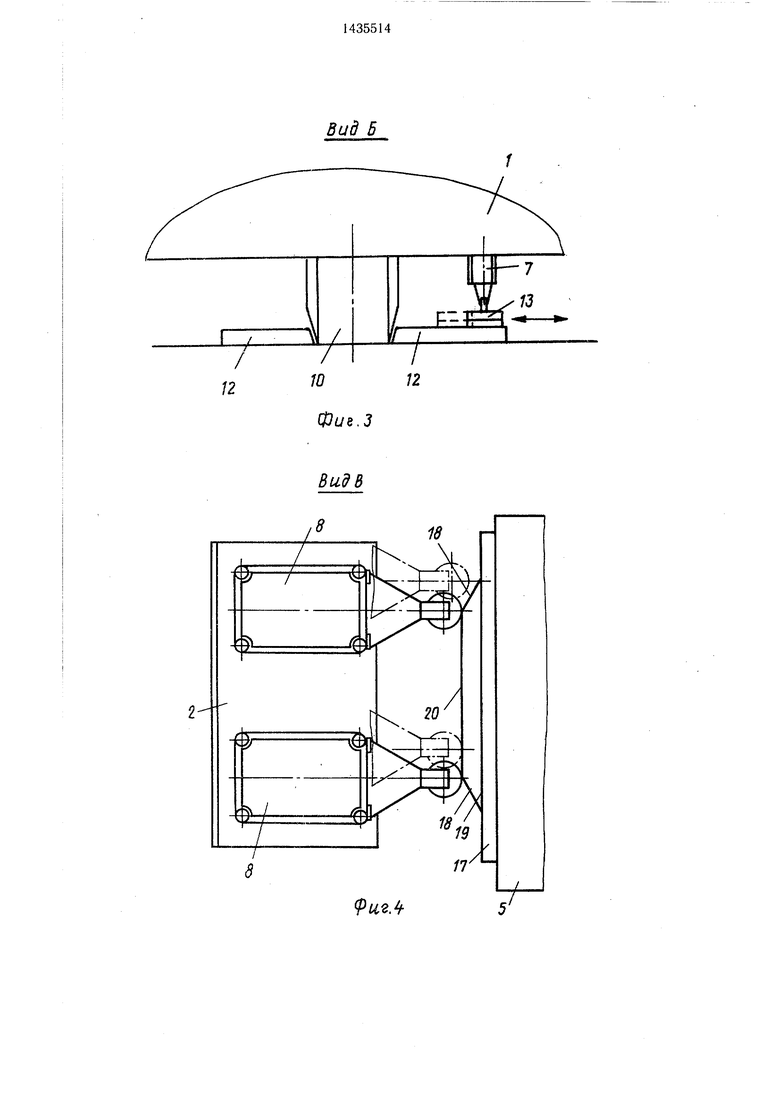
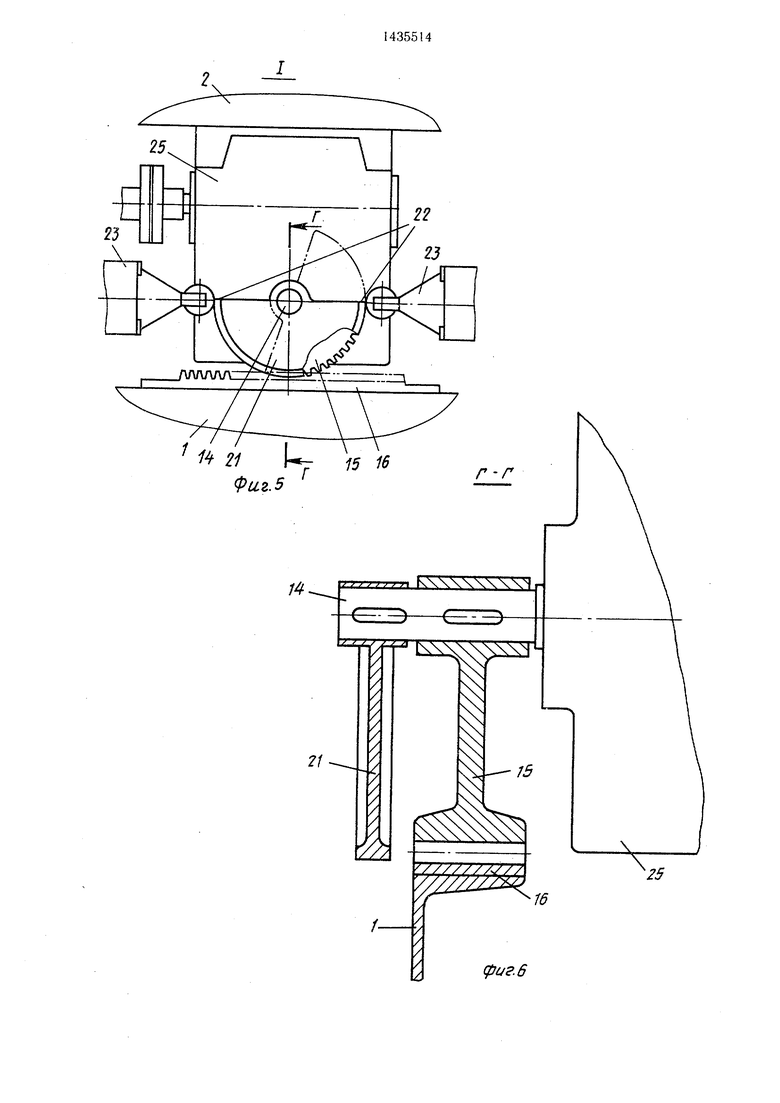
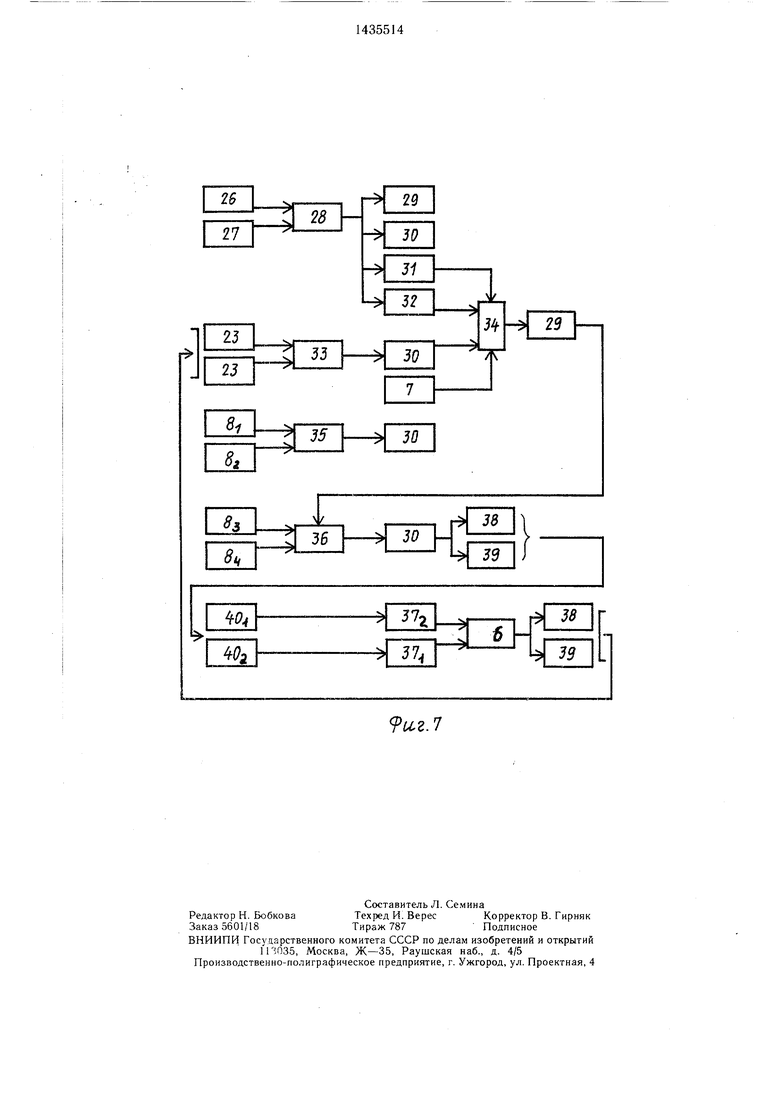
На фиг. 1 изображена транспортная система, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - узел I на фиг. 2; на фиг. 6 - разрез на фиг. 5; на фиг. 7 - функциональная схема системы управления.
Транспортная система для перегрузки штучных грузов содержит приводную колесную раму 1, установленную на ней с возможностью продольного перемещения приводную платформу 2- с приводным роль- I Гангом 3 и узлом останова, трассу 4 I движения транспортного средства, располо- женные вдоль нее столы 5 загрузкивыгрузки и систему управления, связывающую элементы транспортной системы и включающую датчики 7 останова колесной ; рамы и датчики 8 точной установки приводной платформы 2 относительно стола 5. Приводная колесная рама 1 содержит колеса 9-11, при этом колесо 10 установ: лено посередине рамы 1 и является ру- : левым.
; Узел останова (фиг. 3) содержит установленные у столов 5 загрузки-выгрузки ; симметрично продольной оси трассы 4 дви- жения направляющие 12, взаимоде йствую- I щие с рулевым колесом 10 приводной колесной рамы 1, и нажимные элементы 13, размещенные у столов 5 загрузки-выгрузки с I возможностью перемещения перпендикуляр- I но продольной оси трассы 4 движения и периодического взаимодействия с чувст- I вительным элементом датчика 7 останова транспортного средства, который входит в систему управления и установлен на приводной колесной раме 1 со стороны рулевого колеса 10. Транспортная система снабжена узлом позиционирования (фиг. 4), содержащим закрепленную на валу 14 привода продольного перемещения платформы 2 шестерню 15, зубчатую рейку 16, размещенную на приводной колесной раме 1 вдоль нее, взаимодействующую с щестер- ней 15, установленные с возможностью вертикального перемещения на каждом столе 5 загрузки-выгрузки профилированные поверхности, содержащие горизонтальную планку 17 и выступ 18, выполненный в виде равнобедренной трапеции, прикрепленной к горизонтальной планке 17 большим основанием 19 и взаимодействующий меньшим основанием 20 с чувствительными элементами датчиков 8 точной установки приводной платформы 2, котор;.е входят в систему управления и установлены по одной
горизонтальной прямой с внешней стороны платформы 2 на расстоянии друг от друга не более длины меньшего основания 20 трапеции.
Узел позиционирования может быть выполнен иначе, например, с помощью светочувствительных элементов, установленных на приводной платформе, взаимодействующих с ответными частями, расположенными на столах загрузки-выгрузки.
0 Транспортная система снабжена также узлом возврата приводной платформы 2 (фиг. 5) в среднее положение, содержа-, щим жестко закрепленный на валу 14 привода продольного перемещения платформы 2
5 полудиск 21, выполненный с двумя диаметрально расположенными пазами 22;,дат- чики 23, входящие в систему управления, установленные на приводной платформе 2 симметрично относительно вертикальной оси вала 14 привода продольного перемеще0 ния платформы 2, взаимодействующие своими чувствительными эл.ментами с пазами 22 полудиска 21, при -этом выходы датчиков 23 среднего положения платформы, датчиков 7 останова транспортного средст- ва, датчиков 8 точной установки платформы электрически связаны с приводом 24 колесной рамы 1 и приводом 25 продольного перемещения платформы 2. Конструкция устройства возврата платформы в среднее положение может быть
Q иной. В качестве примера приведена транспортная система для внутрицехового перемещения различных грузов в контейнерах- или на поддонах с индуктивным управлением.
Система управления транспортной сис5 темой (фиг. 7) содержит пульт 26 управления; датчик 27 вызова транспортного средства, установленный на каждом столе 5 загрузки-выгрузки,взаимодействующей;,
своим чувствительным элементом с грузом, устанавливаемым на столе 5; логический
0 элемент 28, связывающий элекрические сигналы от пульта 26 управления и датчика 27 вызова транспортного средства; электродвигатель 29 транспортного средства, установленный на колесной раме 1; электрое двигатель 30 перемещения платформы 2, установленный на платформе 2; электромагнит 31, при срабатывании которого происходит выдвижение нажимных элементов 13; электромагнит 32, при срабатывании которого происходит движение профи0 лированных поверхностей 17 и 18; датчики 23 среднего положения платформы 2 установленные на этой платформе; логический элемент 33, связывающий электрические сигналы от. датчиков среднего положения платформы 2; датчик 7 останова
5 транспортного средства, установленный на приводной колесной раме 1 со сторо- tib рулерзого колеса 10; логический эле- .мент 34, связывающий электрические сигналы от электромагнитов 31 и 32, электродвигателя 30 перемещения платформы 2 и датчика 7 останова транспортного средства; датчики 8| и 82 точной установки платформы 2, установленные на этой платформе; логический элемент 35, связываю- щий электрические сигналы датчиков 8i и 82 точной установки платформы 2; логический элемент 36, связывающий электрические сигналы датчиков 8i и 82 точной установки платформы 2 и электродвигателя 29 транспортного средства; элекромагниты 37 фнкса- торов груза на рольганге 3 платформы 2; электродвигатель 38 рольганга 3 платформы 2; электродвигатель 39 рольганга стола 5 загрузки-выгрузки; датчик 40 наличия груза на рольганге 3 платформы 2; 5 мы 2. логический элемент 6, связывающий электрические сигналы от электромагнитов 37 фиксаторов груза на рольганге 3 платформы, сигнал с которого поступает на отключение элекродвигателя 38 рольганга платформы и электродвигателя 39 рольганга 20 грузки-выгрузки. Транспортное средство стола загрузки-выгрузки.подъезжает к указанному столу. Рулевое
Транспортная система для перегрузки штучных грузов работает следующим образом.
В исходном положении колесная рама 25 Нажимлой элемент 13 взаимодействует с находится в любом месте трассы 4 дви- чувствительным элементом датчика 7 оста- жения. Приводной рольганг 3 приводной платформы 2 и стол 5 загрузки-выгрузки свободны от грузов. Приводная платформа 2 может быть сдвинута относительно
среднего положения в любую сторону в ЗО стола загрузки-выгрузки, осевом направлении.Одновременно с этим сигнал с логиВключение системы производится с пульта 26 управления. После того, как на один из столов 5 загрузки-выгрузки установлен контейнер или поддон, предназначенный к
транспортировке, срабатывает датчик 27 БЫ- 35 горизонтальную планку 17 и выступ 18, зова транспортного средства. Суммарный выполненный в виде равнобедренной тра- сигнал с логического элемента 28 одновременно поступает на электродвигатель 29 транспортного средства, электродвигатель 30 перемещения платформы 2, электромагнитдвумя диаметрально расположенными пазами 22. Датчики 23 среднего яоложения платформы установлены диаметрально противоположно с двух сторон полудиска 21. Шестерня 15 и полудиск 21 поворачиваются в одну или другую сторону до тех пор, пока чувствительные элементы датчиков 23 среднего положения платформы 2 одновременно не вступят но взаимодействие с паза.ми 22 по. удиска 21. Это значит, что платфэрма 2 на.чодится R среднем положении. Суммарный сигнал от этих датчиков через логический элемент 33 поступает на отключение электродвигателя 30 продольного перемещения платфорПо сигналу с логического элемента 28 срабатывает элекромагнит 31, который вызывает выдвижение нажимного элемента 13, установленного у каждого из столов 5 заколесо 10 входит в направляющие 12, установленные у каждого стола 5 симметрично продольной оси трассы 4 движения.
нова транспортного средства, который установлен на приводной колесной раме 1 снизу со стороны рулевого колеса 10.
Транспортное средство останавливается у
ческого элемента 28 поступает на элекромагнит 32, который вызывает выдвижение профилированной поверхности, входящей н узел позиционирования, включающей в себя
пеции, прикрепленной к горизонтальной планке 17 большим основанием 19. Профилированная поверхность (17, 18) установлена на столе 5 загрузки-выгрузки. Датчики 8 и 8
ты 31 и 32. По этому сигналу начи- точной установки платформы 2 установлены нается движение транспортного средства ис внешней стороны платформы 2 по олпой установка платформы 2 в среднее поло-горизонтальной прямой. Расстояние между жение, поскольку она может быть разме-чувствительными элементами датчиков долж- щена на колесной раме Г со смещениемно быть не более длины меньшего основа- в любую сторону от среднего положения.. ния 20 трапецеидального выступа 1C). Крутящий момент от электродвигателя 30Если сигналы с этих датчиков не совпа- продольного перемещения платформы 2 передается на шестерню 15, закрепленную на валу 14 привода продольного перемещения. Шестерня 15 находится в зацеплении с зуб гатой рейкой 16, жестко формы 2 и включают его. Если платфор- тановленной на приводной колесной раме 1,ма 2 установлена без смещения относи- и при вращении обкатывается по рейке 16,тельно стола загрузки-выгрузки, то суммар- осуществляя таким образом перемещениеный сигнал с логического элемента 36 платформы 2 относительно колесной ра-отключает электродвигатель 30 перемо ценмя мы 1.платформы и полает команду па пуск Устройство возврата платформ 2 в55 электродвигателей 38 и 39 рольгангов среднее положение содержит жестко закреп-платформы 2 п стола 5 загрузкя-выгпузки. ленный на валу 14 привода продольногоПри наезде контекнерч или поддона с гру- перемещения полудиск 21, выполненный сзом па первый татмик 40 наличия груза.
дают, т. е. платформа смещена относительно стола загрузки-выгрузки, то объединенные через логический элемент 35 они поступают на электродвигатель 30 перемещения платмы 2. грузки-выгрузки. Транспортное средство подъезжает к указанному столу. Рулевое
двумя диаметрально расположенными пазами 22. Датчики 23 среднего яоложения платформы установлены диаметрально противоположно с двух сторон полудиска 21. Шестерня 15 и полудиск 21 поворачиваются в одну или другую сторону до тех пор, пока чувствительные элементы датчиков 23 среднего положения платформы 2 одновременно не вступят но взаимодействие с паза.ми 22 по. удиска 21. Это значит, что платфэрма 2 на.чодится R среднем положении. Суммарный сигнал от этих датчиков через логический элемент 33 поступает на отключение электродвигателя 30 продольного перемещения платформы 2. грузки-выгрузки. Транспортное средство подъезжает к указанному столу. Рулевое
По сигналу с логического элемента 28 срабатывает элекромагнит 31, который вызывает выдвижение нажимного элемента 13, установленного у каждого из столов 5 замы 2. грузки-выгрузки. Транспортное средство подъезжает к указанному столу. Рулевое
Нажимлой элемент 13 взаимодействует с чувствительным элементом датчика 7 оста-
колесо 10 входит в направляющие 12, установленные у каждого стола 5 симметрично продольной оси трассы 4 движения.
Нажимлой элемент 13 взаимодействует с чувствительным элементом датчика 7 оста-
стола загрузки-выгрузки, Одновременно с этим сигнал с логинова транспортного средства, который установлен на приводной колесной раме 1 снизу со стороны рулевого колеса 10.
Транспортное средство останавливается у
стола загрузки-выгрузки, Одновременно с этим сигнал с логи горизонтальную планку 17 и выступ 18, выполненный в виде равнобедренной тра-
ческого элемента 28 поступает на элекромагнит 32, который вызывает выдвижение профилированной поверхности, входящей н узел позиционирования, включающей в себя
горизонтальную планку 17 и выступ 18, выполненный в виде равнобедренной тра-
пеции, прикрепленной к горизонтальной планке 17 большим основанием 19. Профилированная поверхность (17, 18) установлена на столе 5 загрузки-выгрузки. Датчики 8 и 8
точной установки платформы 2 установлены с внешней стороны платформы 2 по олпой горизонтальной прямой. Расстояние между чувствительными элементами датчиков долж- но быть не более длины меньшего основа- ния 20 трапецеидального выступа 1C). Если сигналы с этих датчиков не совпа- формы 2 и включают его. Если платфор- ма 2 установлена без смещения относи- тельно стола загрузки-выгрузки, то суммар- ный сигнал с логического элемента 36 тключает электродвигатель 30 перемо ценмя латформы и полает команду па пуск лектродвигателей 38 и 39 рольгангов платформы 2 п стола 5 загрузкя-выгпузки. При наезде контекнерч или поддона с гру- ом па первый татмик 40 наличия груза.
точной установки платформы 2 установлены с внешней стороны платформы 2 по олпой горизонтальной прямой. Расстояние между чувствительными элементами датчиков долж- но быть не более длины меньшего основа- ния 20 трапецеидального выступа 1C). Если сигналы с этих датчиков не совпа- формы 2 и включают его. Если платфор- ма 2 установлена без смещения относи- тельно стола загрузки-выгрузки, то суммар- ный сигнал с логического элемента 36 отключает электродвигатель 30 перемо ценмя платформы и полает команду па пуск электродвигателей 38 и 39 рольгангов платформы 2 п стола 5 загрузкя-выгпузки. При наезде контекнерч или поддона с гру- зом па первый татмик 40 наличия груза.
дают, т. е. платформа смещена относительно стола загрузки-выгрузки, то объединенные через логический элемент 35 они поступают на электродвигатель 30 перемещения платустановленного на рольганге 3 платформы 2, подается команда на электромагнит 3/2 фиксатора груза на рольганге платформы и происходит выдвижение фиксатора груза, расположенного с противоположной столу стороне рольганга платформы. При наезде груза на второй датчик 402 наличия груза, также установленного на рольганге платформы, подается команда на электромагнит 37i фиксатора груза на рольганге платформы и происходит выдвижение фиксатора груза, расположенного на прилежащей столу стороне рольганга платформы. Груз зафиксирован на платформе с обеих сторон. Суммарный сигнал от электромагнитов 37 фиксаторов через логический эле.мент 6 подает команду на отключение электродвигателей 38 и 39 платформы и стола загрузки-выгрузки. Транспортное средство готово к передвижению. Команда на движение транспортного средства подается с пульта 26 управления.
Таким образом, движение транспортного средства производится по логической схеме вперед-назад, справа-налево.
По сравнению с известными в технике транспортными системами в предлагаемой обеспечена полная ее автономность, независимость от внешних факторов, гибкость, так как подача и прием грузов производится со столов, расположенных как справа, так и слева. Высокая точность останова достигается за счет движения малой массы, а следовательно, малыми усилиями. Кроме того, система обеспечивает установку приводной платформы в среднее положение во время подъезда ее к столу загрузки-выгрузки, что исключает вероятность накопления погрешности, а следовательно, способствует повышению точности установки транспортного средства.
Формула изобретения
1. Транспортная систе.ма для перегрузки штучных грузов, содержа цая приводную
платформу с рольгангом, расположенную на приводной колесной раме на рельсовом пути с возможностью перемеп,ения относительно нее в продольном направлении, узел останова приводной рамой и столы загрузки-выгрузки, расположенные вдоль рельсового пути, отличающаяся тем, что, с целью повышения точности перегрузки, она снабжена узлом позиционирования, вы
полненным из датчиков точной установки.
расположенных на приводной платформе с возможностью взаимодействия с профилированными элементами, расположенными на столах загрузки-выгрузки с возможностью возвратно-поступательного перемещения перпендикулярно рельсовому пути, и узлом установки платформы в среднее положение, расположенным на платформе, а узел останова приводной рамы выполнен из рулевого колеса, установленного в центре рамы, нз направляющих, установленных между
рельсами напротив столов загрузки-выгрузки, и из нажимных элементов, установленных на направляющих с возможностью их возвратно-поступательного перемещения поперек рельсового пути и взаимодействия
с рулевым колесом.
2. Система по п. 1, отличающаяся тем, что датчики точной установки узла позиционирования выполнены из закрепленной на приводном валу продольного перемещения платформы шестерни и зубчатой
рейки.
3.Система по п. 1, отличающаяся тем, что профилированные элементы узла позиционирования выполнены в виде горизонтальной планки и трапецеидального выступа, обращенного меньшим основание.м к платформе.
4.Система по п. 1, отличающаяся те.м, что узел установки платформы в среднее положение выполнен в виде полудиска с двумя диаметрально расположенными пазами, установленного на приводном валу продольного перемещения платформы.
CM
cv
:з
Вид В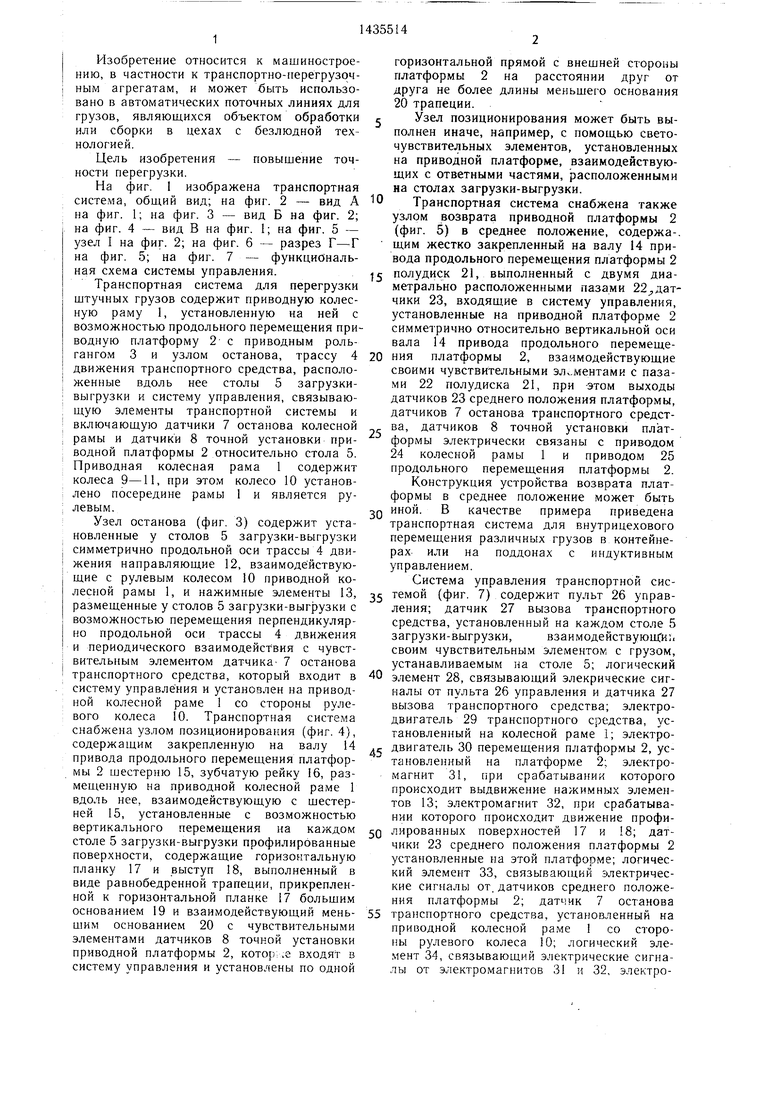
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГРУЗОЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ МАТЕРИАЛА, ИСПОЛЬЗУЕМОЕ ПРИ УКЛАДКЕ АСФАЛЬТОВОГО ПОКРЫТИЯ | 2006 |
|
RU2411320C2 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1402511A1 |
| Транспортная тележка | 1987 |
|
SU1535804A1 |
| Мобильное устройство для монтажа и демонтажа вагонных дверей | 2022 |
|
RU2791355C1 |
| Самоходное транспортное средство | 1984 |
|
SU1154137A1 |
| МАШИНА ДЛЯ НАНЕСЕНИЯ ОБЛИЦОВКИ НА КОКИЛИВ ГМ SФ01Щ внш^^рт^е | 1973 |
|
SU420388A1 |
| Тележка транспортировочная | 2018 |
|
RU2683430C9 |
| ПЕРЕГРУЗЧИК | 1991 |
|
RU2020088C1 |
| Установка для шлифовки и полировки плит из естественного камня | 1973 |
|
SU441133A1 |
Изобретение предназначено для автоматизации поточных линий для грузов, являющихся объектом обработки или сборки в цехах с безлюдной технологией. Цель - повышение точности перегрузки. Для этого на приводной платформе (П) 2 расположены узел ее установки в среднее положение и датчики 8 точной установки, а на расположенных вдоль рельсового пути (РП) столах 5 загрузки-выгрузки расположены с возможностью взаимодействия с датчиками 8 и возвратно-поступательного перемещения перпендикулярно РП профилированные элементы, состоящие из планки 17 и выступа 18. При этом П 2 с рольгангом 3 расположена на приводной колесной раме 1 на РП и может перемещаться относительно нее в продольном направлении с помощью привода 25. Узел останова рамы 1 выполнен из установленного в ее центре рулевого колеса 10, направляющих 12 и установленных на них нажимных элементов. Направляющие 12 установлены между рельсами РП напротив столов 5 загрузки-выгрузки. Нажимные элементы имеют возможность возвратно- поступательного перемещения поперек РП и взаимодействуют с рулевь1м колесом 10. Узел установки П 2 в среднее положение выполнен в виде полудиска с двумя диаметрально расположенными пазами. Г1о- лудиск установлен на валу привода 25. Подача и прием грузов производятся системой со столов 5 по логической схеме как справа, так и слева. Во время подъезда П 2 к столу 5 обеспечивается ее установка в среднее положение. Это исключает вероятность накопления погрешности. 3 з.п.ф-лы, 7 ил. S (Л 4 СО СП сл
В ид В
9u2.
/ 21
Фиг. 5
21
15 16
r-r
tN5:s 4Xx::a
N
15
/
X
/ / /
J
W
фиг 6
25
9(гЛ
| Транспортная тележка | 1981 |
|
SU994377A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Промышленные грузовые погрузчики | |||
| Проспект фирмы «Юнгхайнрих, ФРГ, 1978, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
