Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания грузов на кранах, судах и других подвижных объектах,
Характерной особенностью измерений массы в таких условиях является наложение низкочастотной динамической помехи на измеряемую величину, в связи с чем мгновенное значение ее определяется выражением
Q(t) QQ + Qm sin Qt,(1)
где Qo - действительное значение массы груза, кг;
Qm - амплитудное значение динамической помехи, кг;
Q- круговая частота изменения помехи, с ;
t - момент измерения, с.
Известен способ измерения массы груза в условиях помех, основанный на умень- шении влияния помех на результат измерения путем фильтрации помех.
Извэ лный способ пб обеспечивав г необходимей точности измерения при ограниченном времени измерения.
Наиболее близким по технической сущности к изобретению является способ измерения массы, реализованный в весоизмерительном устройстве. В этом способе после нзгруженмя весов производят последовательные измерения сигнала датчика веса через заданные интервалы времени, результаты измерений -запоминают, а затем производят вычисление массы груза.
Недостатком этого способа является большая длительность процесса измерения, равна целому числу периодов помехи, и связанные с этим большие потери измерительной информации.
Этот недостаток имеет особое значение, например, для крановых весов, пред- назначеннь ,4 для измерения массы грузов в процессе их погрузки или перемещения с места на место, а также для дозирующик
Ј
ГО
ы
CxmcjA
J
весов, служащих для отслеживания непрерывно изменяющейся массы материалов.
Цель изобретения - уменьшение времени измерения.
Поставленная цель достигается тем, что в предлагаемом способе производят три измерения, причем первое измерение производят в момент достижения измеряемой величиной экстремального значения, а интервалы двух последующих измерений задают относительно первого измерения.
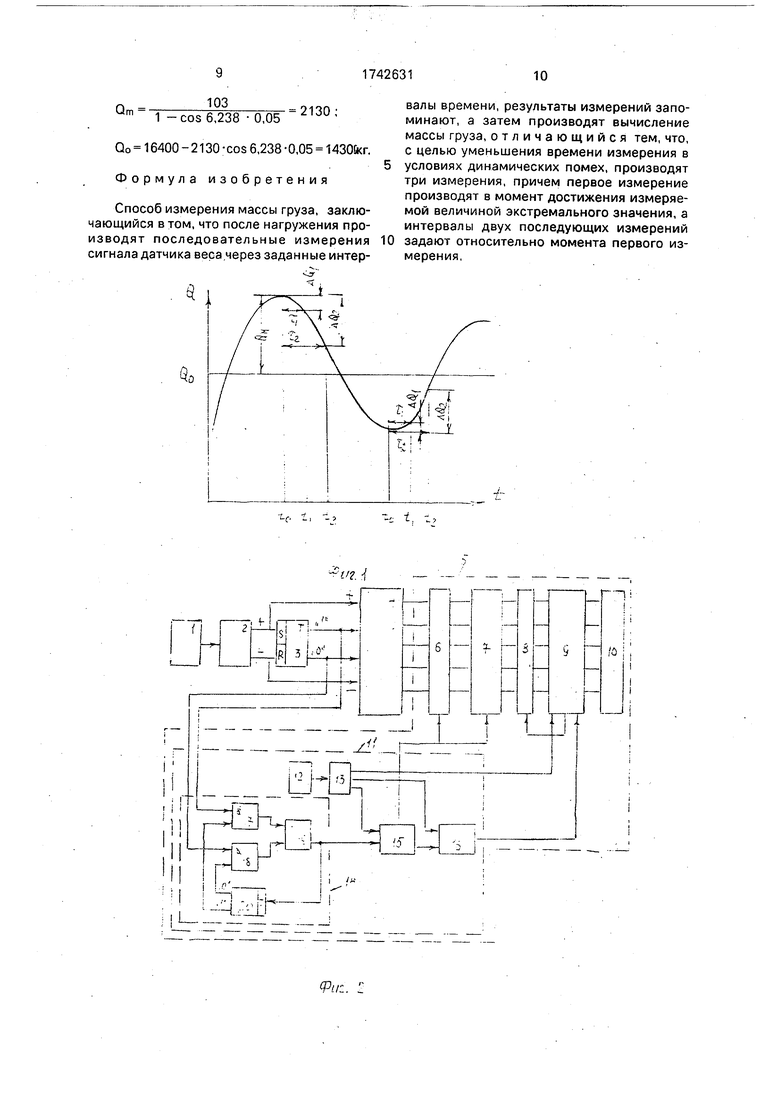
На фиг. 1 приведен график изменения измеряемой величины Q во времени; на фиг. 2 - структурная схема весоизмерительного устройства.
На фиг. 1 обозначено: - момент времени, соответствующий экстремальному значению измеряемой величины; Ti,t2- интервалы двух последующих измерений, отсчитываемых от .0; ДО.1,2 - приращения измеряемой величины по отношению к экстремальному ее значению через интервалы времени т и Г2 соответственно.
Устройство (фиг. 2) состоит из силоизме- рительных датчиков 1, автокомпенсатора 2 следящего уравновешивания, триггера 3 знака, реверсивного счетчика 4 и специализированного вычислительного устройства (С В У 5).
Силоизмерительные датчики 1 преобразуют силу тяжести взвешиваемого груза в электрический сигнал. Их выход подключен к входу автокомпенсатора 2, который в процессе уравновешивания выходного сигнала датчиков одновременно производит его преобразование в пропорциональное количество импульсов. Автокомпенсатор 2 имеет два выхода, обозначенные знаками + и -. С этих выходов импульсы поступают на триггер 3 знака и реверсивный счетчик 4 в зависимости от направления изменения измеряемой величины: при ее увеличении с выхода, обозначенного знаком +, а при уменьшении - с выхода, обозначенного знаком -. Такими же знаками обозначены соответственно суммирующий и вычитающий входы счетчика 4, Индексом 1 обозначен единичный выход триггера 3, а индексом О - его нулевой выход.
Выходы реверсивного счетчика 4 подключены к входам специализированного вычислительного устройства 5.
В состав СВУ 5 входят: первый многоразрядный ключ 6, оперативное запоминающее устройство (ОЗУ) 7, второй многоразрядный ключ 8, микропроцессор (МП) 9, блок 10 индикации и блок 11 управления.
Многоразрядные ключи 6 и 8 служат для передачи цифровой информации соответственно из реверсивного счетчика 4 в ОЗУ 7 и из ОЗУ 7 в микропроцессор 9 при подаче на
их управляющие входы импульсов управления. На ключ б такие импульсы поступают из блока 11 управления, а на ключ 8 - из микропроцессора 9. Микропроцессор 9 предназначен для выполнения арифметических
и логических операций под воздействием команд управления (программы), поступающих из блока 11 управления.
Блок 11 управления содержит генератор 12 импульсов времени, делитель 13 частоты, логическую схему 14, формирователь 15 сигналов управления и программируемую логическую матрицу (ПЛМ) 16. Выход генератора 12 импульсов времени подключен к делителю 13 частоты. Делитель 13 частоты служит для формирования импульсов с заданной длительностью периодов их по- вторет я. Выходы делителя 13 частоты подключены к МП 9, формирователю 15 сигналов управления и ПЛМ 16.
Логическая схема 14 служит для определения момента достижения измеряемой величиной Q(t) Экстремального значения. В ее состав входят две схемы И 17 и 18, схема ИЛИ 19 и Т-триггер 20. Первые входы схем
И 17 и 18 подключены к выходам триггера 3 знака, а вторые их входы - к выходам Т-триггера 20. Индексами 1 и О обозначены соответственно единичный и нулевой выходы этого триггера.
Выходы схем И 17 и 18 подключены к входам схемы ИЛИ 19, а выход схемы ИЛИ 19 - к входу формирователя 15 импульсов управления и входу Т-триггера 20.
Способ измерения массы груза осуществляется следующим образом.
Весы нагружают грузом, массу которого необходимо измерить. Под воздействием динамической помехи измеряемая величина, т.е. масса груза с наложенной на нее
динамической помехой, изменяется так, как показано на фиг. 1.Эта зависимость описывается формулой (1)
Q (t) Qo +dm sin Qt. С помощью логической схемы 14 определяют момент достижения измеряемой величиной своего экстремального значения, измеряют это значение, т.е. снимают показания весов в момент to, преобразуют его в цифровую форму и записывают в оперативную память специализированного вычислительного устройства 5.
В момент to величина Qt0 ра-на лг/2 или 90°, поэтому в этот момент
Q(to) Qo+Qm .(2)
Затем через интервалы времени, отстоящие от to соответственно на тг-i и t2.последовательно производят еще два измерения массы груза с наложенной на нее динамической помехой, в результате чего определяют значения
Q(ti) Q(t0+ Ti) Qo+Qmcos Qr-i; (3)
Q(t2) Q(t0+ T2) Qo+QmCOS QZ2 . (4)
Эти значения также преобразуют в цифровую форму и записывают в оперативную память специализированного вычислительного устройства 5. После этого с помощью специализированного вычислительного устройства 5 настроенного на автоматическое выполнение заданной программы вычисле- ний, определяют действительное значение измеряемой массы путем реализации программы вычислений, описываемых формулами
AQi Q(t0)-Q(to + Ti);(5)
Q(to)-Q(t0 + r2);
Г1.
Ъ
тг.
ri
(6) (7)
(8) (9)
Q -. V6(1 -ac) 4- Ув(Ь-ас) ; Т1о, Т2т
1-acJdj-a35
AQ2
(10)
1 - cosTIrT 1 - cos QTZ : (11) Qo Q(T)-QmCosQr.(12)
Формула (10) дл, круговой частоты Q
sin
sin
2 ЙГ2
a2
(14)
получена из уравнения
24 Qn -Озт a(24Qr2-Q3T2), (13) которое получается из соотношения
,2 Qn
после разложения функции sin QT- в ряд Тейлора.
5
Ю15 20
25
30
35
40
45
ел
55
Принцип действия устройства, в котором реализован предлагаемый способ, состоит в следующем.
После нагружения весов на выходе си- лоизмерительных датчиков 1 появляется электрический сигнал, пропорциональный массе груза с наложенной на нее динамической помехой. Этот сигнал отслеживается автокомпенсатором 2 и одновременно преобразуется в пропорциональное количество импульсов. На этапе возрастания выходного сигнала датчиков 1 импульсы с выхода автокомпенсатора 2, обозначенного знаком +, поступают на первый вход триггера 3 знака, устанавливая его в единичное состояние, и на суммирующий вход реверсивного счетчика 4. В момент достижения измеряемой величиной экстремального значения поступление импульсов на суммирующий вход счетчика 4 прекращается, а затем импульсы появляются на втором выходе автокомпенсатора 2, обозначенном знаком -. Первый же импульс, появившийся на этом выходе, переводит триггер 3 знака из единичного состояния в нулевое. Момент изменения состояния триггера 3 знака и является моментом времени t0. Он распознается логической схемой 14 следующим образом.
В исходном состоянии Т-триггер 20 па- ходится в нулевом состоянии, С его нулевого выхода единичный потенциал поступает на первый вход схемы И 18, а с единичного выхода нулевой потенциал поступает на первый вход схемы И 17. На второй вход схемы И 17 поступает единичный потенциал с единичного выхода триггера 3 знака, а нз второй вход схемы И 18 поступает нулевой потенциал с нулевого выхода того же триггера, Таким образом на входах схем И 17 и 18 имеется комбинация нуля и единицы, поэтому на выходах этих схем нулевые потенциалы и, соответственно, на выходе схемы ИЛИ 19 также нулевой потенциал.
В момент изменения состояния триггера 3 знака изменяются и потенциалы на вторых входах схем И 17 и 18: у схемы И 17 он оказывается нулевым, а у схемы И 18 - единичным. Таким образом, на обоих входах схемы И 18 обравуются потенциалы единичного уровня, поэтому и на выходе схемы И 18 появляется единичный потенциал. Этот потенциал проходит через схему ИЛИ 19 и поступает на вход Т-триггера 20 и вход формирователя 15. Под действием этого сигнала Т-триггер 20 переходит из нулевого состояния в единичное, тем самым изменяя потенциалы на первых входах схем И 17 и 18 на противоположные. В результате этого на выходах обеих схем И 17 и 18, а также на выходе схемы ИЛИ 19 снова устанавливаются нулевые потенциалы.
Сформировавшийся в результате рассмотренных переключений схем И 17, 18, ИЛИ 19 и Т-триггера 20 импульс единичного уровня поступает в триггер первого разряда регистра сдвига, входящего в состав формирователя 15 сигналов управления. В результате этого формируется первый сигнал управления многоразрядным ключом 6. Под действием этого сигнала ключ 6 открывается и запись из счетчика 4 передается в отведенную для нее ячейку ОЗУ 7,
Под действием тактовых импульсов, поступающих из делителя 13 частоты на второй вход формирователя 15 сигналов управления, единица, записанная в триггер первого разряда, последовательно передается из разряда в разряд, перемещаясь по формирователю 15 от входа к выходу. По истечении интервала времени длительностью с эта единица поступает в триггер некоторого к-го разряда, в результате чего формируется второй сигнал управления многоразрядным ключом 6 и запись из счетчика 4 передается в отведенную для нее ячейку ОЗУ 7. Таким же образом по истечении интервала длительностью та формируется третий сигнал управления и в третий раз содержимое счетчика 4 передается в ОЗУ 7.
Каждая из записей счетчика 4, передаваемых в ОЗУ 7, является цифровой формой измеряемой величины в соответствующий момент времени. После поступления в ОЗУ 7 установленного числа измерений импульс управления поступает на вход ПЛМ 16 и происходит запуск заданной программы вычислений, описываемых формулами (5}-(12).
Если цель измерений состоит в определении неизменной массы груза, то после вычисления действительного значения массы груза для момента времени r Tiv T2 работа устройства прекращается.
Если же цель измерений состоит в отслеживании изменяющейся массы материала в процессе дозирования, то после определения массы для моментов времени т ПАТ2 работа устройства продолжается в следующем порядке.
Вычисленное по формуле значение амплитуды помехи Qm запоминается в отведенной для нее ячейке памяти ОЗУ 7.
Формирователь 15 продолжает формировать импульсы управления многоразрядным ключом 6 и ПЛМ 16 до поступления на его вход очередного управляющего импульса, сформированного в момент перехода измеряемой величиной очередного экстремального значения.
Под действием импульсов управления, поступающих на вход ключа 6, производится измерение текущих значений измеряемой величины с установленным периодом дискретности, т.е. определяется значение Q(r) для произвольного значения т, отсчитываемого от to и расположенного в интервале от t0(l) до to(l+1), где i 0, 1,2.
Под действием импульсов управления, поступающих в ПЛМ 16, производится определение действительного значения массы для этих моментов времени по формуле (12).
В момент поступления на вход формирователя 15 управляющего импульса происходит повторение рассмотренного цикла работы устройства.
Таким образом, предлагаемый способ позволяет осуществлять как однократное измерение массы груза в условиях помех, так и отслеживание непрерывно изменяющейся массы с некоторым интервалом дискретности. При этом время, необходимое для однократного измерения, не превышает одной четверти периода изменения динамической помехи.
Пример. Производят измерение массы скрапа на крановых весах в процессе его транспортировки. Под действием динамической помехи показания весов колеблятся, что затрудняет определение действительного значения измеряемой массы.
Для определения действительного значения измеряемой массы производят три измерения: одно - в момент достижения измеряемой величиной своего экстремального значения, которое составляет 16400 кг, два других через интервалы времени п 0,05 с и Т2 0,1 с, которые равны соответственно 16297 и 15998кг. Полученные результаты измерений передают в специализированное вычислительное устройство, которое автоматически последовательно вычисляет
AQi 16400- 16297 103 ; Л 0,2 16400-15998 402;
а V 103/402 0,50618;
с 0,1/0,05 2 ; 2
00,5
б,238 ; 1 -0,50618 -23
103
2130;
m 1 -cos 6,238 0,05 Q0 16400 -2130 -cos 6,238 -0,05 1430kr. Формула изобретения
Способ измерения массы груза, заключающийся втом, что после нагружения производят последовательные измерения сигнала датчика веса через заданные интеро
а ь
t-c г, --
валы времени, результаты измерений запоминают, а затем производят вычисление массы груза, отличающийся тем, что, с целью уменьшения времени измерения в
условиях динамических помех, производят три измерения, причем первое измерение производят в момент достижения измеряемой величиной экстремального значения, а интервалы двух последующих измерений
задают относительно момента первого измерения

| название | год | авторы | номер документа |
|---|---|---|---|
| Автокомпенсатор для тензометрических весов | 1982 |
|
SU1044998A1 |
| Устройство для измерения массы и управления потоком сыпучего материала | 1987 |
|
SU1525475A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1968 |
|
SU212356A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Система экстремального регулирования квадрупольного масс-спектрометра | 1989 |
|
SU1795419A1 |
| Цифровое тензометрическое устройство для динамических измерений | 1982 |
|
SU1015258A1 |
| Устройство для поосного взвешивания подвижных объектов | 1989 |
|
SU1702185A1 |
| Устройство для измерения характеристик синусоидального сигнала | 1990 |
|
SU1758575A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Аналого-цифровой преобразователь | 1977 |
|
SU683017A1 |
Сущность изобретения: после нагруже- ния весов производят последовательные из- мерения сигнала датчика веса через заданные интервалы времени, результаты запоминают, причем первое измерение производят в момент достижения измеряемой величиной экстремального значения, а интервалы двух последующих измерений задают относительно момента первого измерения, массу груза определяют путем вычисления, иопользуя результаты трех измерений, 2 ил.
| Цифровой измеритель тензометрических весов | 1983 |
|
SU1164558A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весоизмерительное устройство | 1981 |
|
SU972245A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
