Изобретение относится к измерительной технике, а именно к средствам измерения вибрационных реактивных моментов гиромоторов.
Известна установка (аналог), описанная в SU №325690, где в качестве измерителя угловых колебаний, возбуждаемых гиромотором, установленным в поплавковом гироузле, используется эталонный поплавковый электромеханический датчик угловой скорости (ДУС). Контролируемый гироузел соединяют с эталонным датчиком механически и размещают на прокладке, которая играет роль упругого подвеса, позволяющего эталонному ДУС воспринимать и измерять угловые колебания. В эталонном ДУС замыкают обратную связь от датчика угла прецессии через усилитель на датчик момента, соединяют нагрузочный резистор через АЦП с ПЭВМ. Включают гиромотор контролируемого гироузла, гиромотор эталонного датчика оставляют не включенным, а измерение напряжения на нагрузочном резисторе в функции времени осуществляют для эталонного ДУС измерительным прибором и по результатам разложения функции напряжения в ряд Фурье делают заключение об амплитудах переменной составляющей на отдельных частотах, которые будут содержаться в выходном сигнале ДУС, собираемого с использованием контролируемого гироузла. Указанная установка имеет неопределенные динамические характеристики и значительный момент упругого сопротивления, что снижает чувствительность системы.
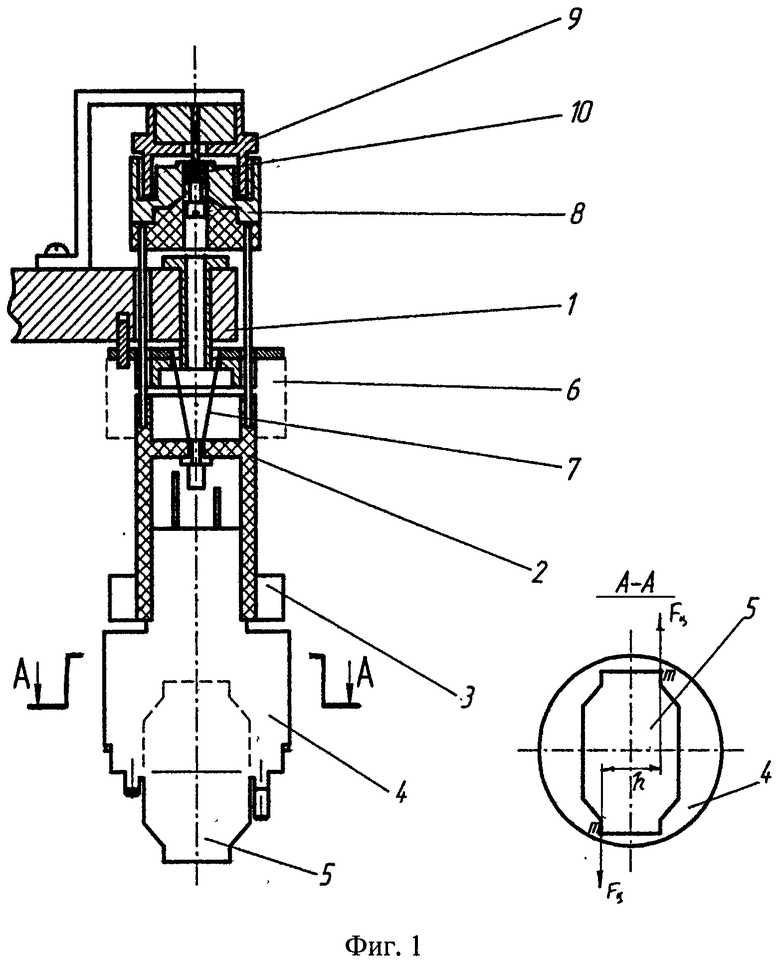
За прототип принята установка, описанная в RU 2427801 от 11.11.2009, изображенная на фиг.1. Установка содержит подвес, средство механического соединения в виде технологической камеры, допускающей закрепление гиромотора экваториальной либо полярной осями вдоль оси подвеса, средство измерения и обработки выходного сигнала с измерителя характеристик угловых вибраций, выполненного в виде первого магнитоэлектрического датчика, обмотки которого состыкованы через измерительный усилитель со средствами измерения сигнала и закреплены на корпусе устройства в поле магнитов, установленных на оси подвеса. Представлена конструкция установки со сборкой гиромотора в технологическом корпусе, закрепленном в положении, соответствующем контролю частот угловых вибраций в экваториальной плоскости.
Испытуемый гиромотор 5 установлен в корпусе 4, который закреплен в цанге 2 с помощью хомута 3. Цанга 2 является подвижной частью установки, имеет упругий подвес на 3-х струнах 7 через арретирующее устройство 6 к корпусу 1 установки и жестко связана с магнитной системой 8 магнитоэлектрического датчика, обмотки которого 9 закреплены на корпусе. Центрирующая камневая опора 10 введена для обеспечения равномерности рабочего зазора магнитоэлектрического датчика сигнала. Подвод питания к гиромотору осуществляется через три металлические струны 7 - подвес установки.
Таким образом, контроль вибрационных реактивных моментов гиромоторов осуществляется путем закрепления испытуемого гиромотора в подвесе установки при ориентации ротора либо осью вращения вдоль вертикальной оси установки и контроля угловых вибраций вокруг полярной оси ротора, либо при ориентации ротора экваториальной осью вдоль вертикальной оси установки для контроля угловых вибраций, возникающих вокруг экваториальной оси ротора, ориентированной вдоль оси чувствительности установки. Поскольку в последнем случае проверяемый гиромотор может возбуждать одновременно целый ряд частот, то сигнал датчика установки будет представлять собой сложную периодическую функцию.
Указанная установка на фиг.1 имеет следующие недостатки.
1. Прямое измерение напряжения с выхода измерительного усилителя в отсутствие компенсирующей обратной связи не обеспечивает высокую точность контроля интенсивности (ряда амплитуд) вибрационного момента вокруг оси подвеса при нестабильных масштабных коэффициентах установки на фиксированных частотах.
2. Упругий подвес на металлических струнах не обеспечивает постоянство ориентации оси подвеса и, следовательно, зазора в магнитоэлектрическом датчике, влияющего на стабильность масштабного коэффициента установки на фиксированных частотах.
3. Масштабирование установки с использованием эталонного гиромотора и ряда частот однофазного напряжения питания - достаточно трудоемкий технологический процесс.
Задачей изобретения является повышение точности и технологичности контроля вибрационных реактивных моментов гиромоторов на этапе его изготовления посредством внедрения заявляемого стенда.
Технический результат достигается тем, что в устройство, содержащее подвес, средство механического соединения в виде технологической камеры, допускающей закрепление гиромотора экваториальной либо полярной осями вдоль оси подвеса, средство измерения и обработки выходного сигнала с измерителя характеристик угловых вибраций, выполненного в виде первого магнитоэлектрического датчика, обмотки которого состыкованы через измерительный усилитель со средством измерения сигнала и закреплены на корпусе устройства в поле магнитов, установленных на оси подвеса, вводится второй магнитоэлектрический датчик, установленный соосно и аналогично закрепленный с первым магнитоэлектрическим датчиком, усилитель мощности, нагрузкой которого являются обмотки второго магнитоэлектрического датчика, и токоподводы с возможностью изменения коэффициента жесткости, при этом вход усилителя мощности соединен с выходом измерительного усилителя, а подвес выполнен в виде вала, соединенного с камерой и вертикально установленного в подшипниках корпуса, токоподводы к гиромотору выполнены в виде трех пружин, концы которых через контактные платы стыкуются с технологической камерой и корпусом устройства.
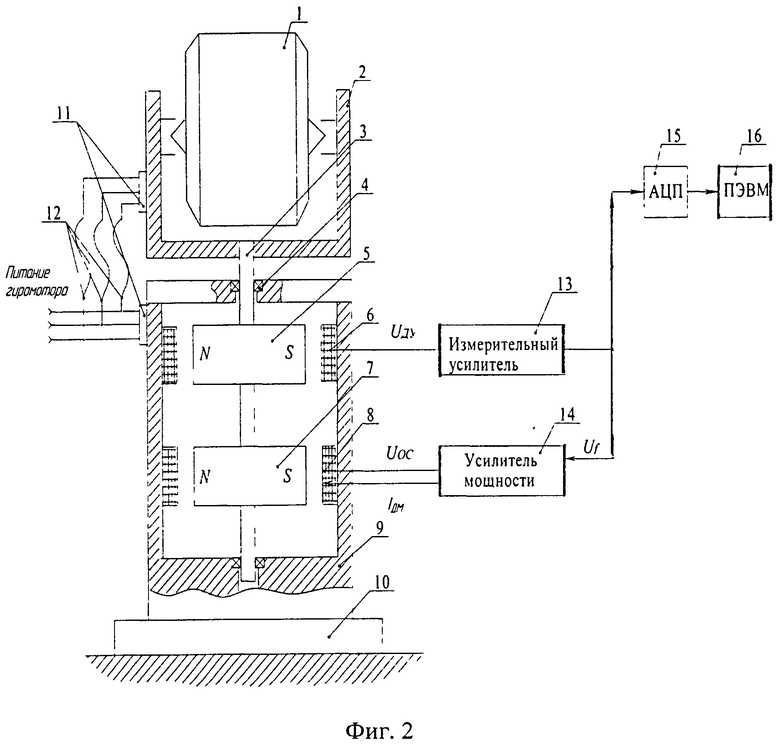
На фиг.2 представлена функциональная схема предлагаемого стенда, при ориентации ротора гиромотора экваториальной осью вдоль оси подвеса, содержащая следующие функциональные узлы: гиромотор 1 в виде синхронного гистерезисного двигателя, технологическую камеру 2, вал подвеса 3, подшипники 4, магниты 5, 7 и обмотки 6, 8 соответственно первого и второго магнитоэлектрических датчиков (второй датчик установлен соосно и аналогично первому датчику - обмотка закреплена на корпусе стенда, а магнит закреплен на валу подвеса), корпус 9, подставку 10, контактные платы 11, пружины 12 (токоподводы с регулируемой угловой жесткостью), измерительный усилитель 13, усилитель мощности 14, средство измерения сигнала (ПЭВМ 16 и аналого-цифровой преобразователь 15, через который подается в ПЭВМ выходной сигнал с первого датчика), при этом питание гиромотора осуществляется от источника питания в виде процессорного модуля (на базе ADUC 7026) (на фиг.2 не показан).
Конструкции первого и второго магнитоэлектрических датчиков идентичны конструкции датчика момента эталонного ДУС, описанного в SU №325690.
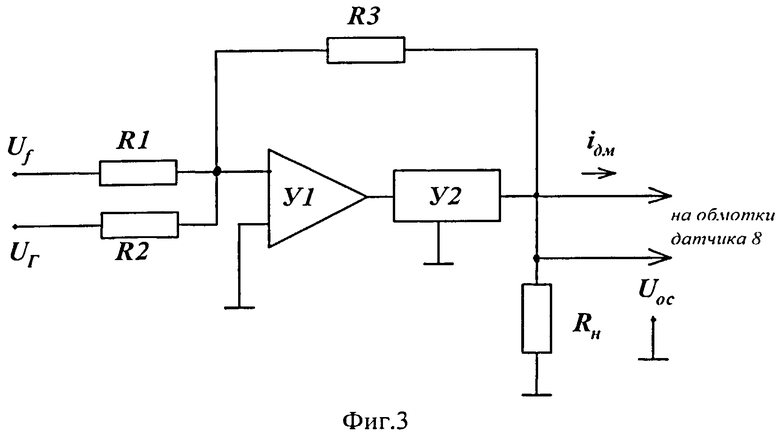
Усилитель мощности (фиг.3), выполненный с возможностью изменения коэффициента усиления, выходом соединенный с выводами обмотки второго датчика, содержит усилитель У1, инвертирующим входом через резистор R1, соединенный с выходом измерительного усилителя (через резистор R2 - возможно соединение с выходом генератора синусоидального напряжения). Выход усилителя У1 через усилитель У2 (эмиттерный повторитель по схеме Дарлингтона) соединен с началом обмотки второго датчика, конец которой соединен через эталонный резистор RH с общей шиной, а также через резистор Rн с инвертирующим входом усилителя У1. Ток iдм через второй датчик и напряжение Uoc на резисторе Rн определяются по формулам:
где Rн<(R1 и R3), R3 - регулировочный резистор, UГ - эталонное напряжение с генератора синусоидального напряжения, Uf - выходное напряжение измерителя угловой вибрации.
Стенд работает следующим образом:
При масштабировании стенда с использованием разбалансированного ротора эталонного гиромотора требуется одно значение масштабного коэффициента из ряда фиксированных частот однофазного напряжения питания, если на этих частотах выполняется условие: Mf-Мдм=0, при отсутствии частотной зависимости компенсирующей обратной связи по напряжению Uf, при этом Uf=Мдм/(Кум·Кдм/Rн, где Кум·Кдм /Кн - масштабный коэффициент на фиксированных частотах, на которых необходимо определить характеристики возбуждаемых ГМ вибраций. Тем самым снижается трудоемкость способа прогнозирования переменной составляющей нулевого сигнала ДУС.
Повышается точность определения масштабного коэффициента при нестабильной крутизне измерителя характеристик угловых вибраций, выполненного в виде первого магнитоэлектрического датчика. При этом из уравнения колебаний подвеса (без обратной связи) имеем: 
Возможен эффективный контроль амплитудно-частотных характеристик устройства путем подачи эталонного напряжения с генератора синусоидального напряжения на обмотки второго магнитоэлектрического датчика. При этом частота напряжения соответствует ряду фиксированных частот из результатов разложения измеренного напряжения в ряд Фурье.
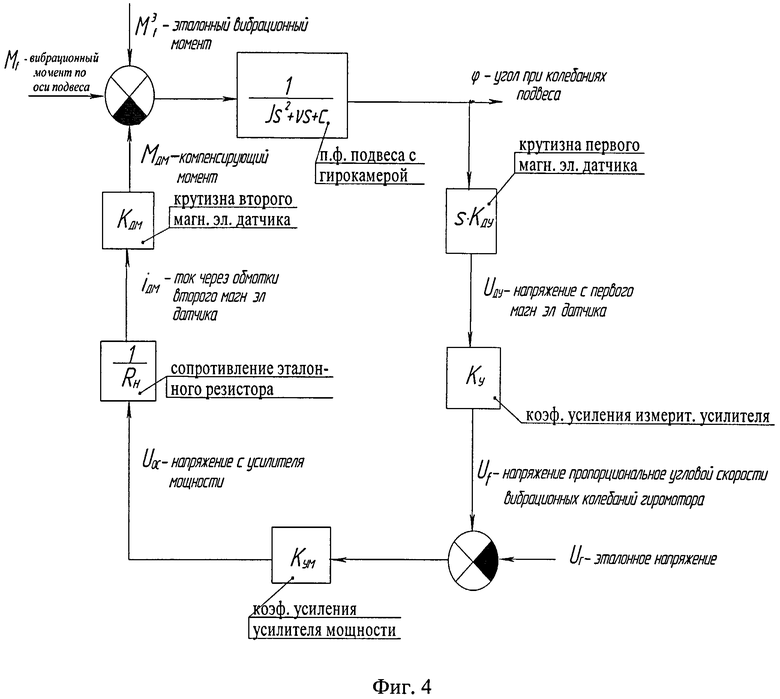
Для реализации способа прогнозирования переменной составляющей выходного сигнала ДУС (ωf) по характеристикам угловых вибраций (Mf), возбуждаемых гиромотором, используется приведенная на фиг.4 структурная схема стенда и передаточные функции замкнутой и разомкнутой систем.
Заявляемый стенд относится к замкнутым системам автоматического управления, где управляющее воздействие - момент Мдм, формируется в зависимости от управляемого напряжения Uf, изменение которого происходит под действием возмущающего момента Mf.
Формируемый момент Мдм вычитается из момента Mf при отрицательной (компенсирующей) обратной связи, соединяющей вход системы (подвес стенда) с ее выходом (второй датчик) через последовательно соединенные первый датчик, измерительный усилитель, усилитель мощности и второй датчик. Стенд относят к разомкнутым системам автоматического управления, если момент Мдм не вычитается из момента Mf.
Структурная схема на фиг.4 сформирована в соответствии с операторной матричной формой уравнения колебаний по оси подвеса:


a11=J·s2+ν·s+C, где J, ν - момент инерции и коэффициент демпфирования по оси подвеса (ν определяется при гармонической линеаризации трения в подшипниках); C - регулируемая угловая жесткость пружины токоподвода, при этом жесткость пружин, навитых из стальной проволоки и работающих на растяжение, или пластинчатых пружин изгиба, регулируется путем перемещения контактной платы параллельно оси подвеса;
a21=s·Кду·Ky·Кум/Rp, где s=jω, Кду - крутизна характеристики первого датчика по угловой скорости колебаний по оси подвеса; Ку - коэффициент усиления измерительного усилителя, Кум - регулируемый коэффициент усилителя мощности; Rp - эталонный резистор на выходе усилителя мощности; a12=Кдм, где Кдм - крутизна моментной характеристики второго датчика; a22=-1.
Для анализа устойчивости стенда используются передаточные функции разомкнутой и замкнутой системы (s=jω - оператор Лапласа): W(s)=W1(s)·W2(s), Ф(s)=W(s)/(1+W(s))
Из анализа фиг.4 следует, что W1(s)=Кум·Кдм/Rн;
W2(s)=s·Кду·Ky/(J·s2+ν·s+С)
Из анализа фазочастотной характеристики стенда с разомкнутой обратной связью следует, что пересечение уровня -180° отсутствует, следовательно, в замкнутом состоянии стенд имеет достаточные запасы устойчивости (запас по фазе 90°). Из анализа логарифмической АЧХ стенда с разомкнутой обратной связью следует, что присутствуют нижняя и верхняя частоты среза, которые выставляются с учетом минимальной и максимальной из фиксированных частот вибрационных колебаний путем регулировки коэффициента усиления (Ку, Кум) и жесткости пружин (С) в стенде, при этом запасы устойчивости практически не изменяются.
По передаточной функции Ф(s) построена амплитудно-частотная характеристика (АЧХ) макета стенда с компенсирующей обратной связью.
Из анализа АЧХ стенда с обратной связью следует, что по уровню 0.7 присутствуют нижняя и верхняя полосы пропускания, соответствующие нижней и верхней частоте среза.
Для оценки точности и технологичности контроля вибраций гиромотора, посредством внедрения предлагаемого стенда, используются передаточные функции замкнутой системы для выходного сигнала Uf и для момента Мдм по возмущающему воздействию Mf: Y(s)=W2(s)/(1+W(s)), Ф(s)=W(s)/(1+W(s))
Из сравнительного анализа Y(s) и φ(s) с учетом W1(s) следует:
- частотные характеристики для измеряемого напряжения U/ и компенсирующего момента Мдм по моментам Mf, 

- масштабный коэффициент стенда определяется из выражения для Y(s) и составляет на фиксированных частотах - Кум·Кдм/Rн. Следовательно, с учетом АЧХ стенда с обратной связью, при масштабировании потребуется одно значение масштабного коэффициента на любой фиксированной частоте в интервале от нижней до верхней частот среза;
- возможен периодический контроль АЧХ замкнутой системы по величине отношения амплитуды измеряемого напряжения Uf к амплитуде напряжения UГ с генератора синусоидального напряжения;
- стабильность ряда масштабных коэффициентов стенда в отсутствие компенсирующей обратной связи определяется выражением для передаточной функции W2(s), где крутизна Кду первого магнитоэлектрического датчика и зависит от стабильности зазора между магнитами и катушками датчика при упругом подвесе.
Кроме того, допустимое значение вибрационного момента 

Таким образом, заявлен стенд для измерения вибрационных реактивных моментов гиромотора, содержащий подвес, камеру, обеспечивающую закрепление гиромотора либо экваториальной, либо полярной осями вдоль оси подвеса, первый магнитоэлектрический датчик, обмотка которого соединена через измерительный усилитель со средством измерения сигналов и закреплена на корпусе стенда в поле магнита, установленного на оси подвеса. Отличительная особенность стенда состоит в том, что введены второй магнитоэлектрический датчик, установленный соосно и аналогично закрепленный с первым датчиком, усилитель мощности, выходом соединенный с обмоткой второго датчика, а входом соединенный с выходом измерительного усилителя, и токоподводы с возможностью изменения коэффициента жесткости, при этом подвес выполнен в виде вала, соединенного с камерой и установленного в подшипниках корпуса стенда, а концы токоподводов стыкуются с камерой и корпусом стенда.
Техническим результатом предлагаемого изобретения является повышение точности определения масштабного коэффициента и технологичности контроля вибрационных реактивных моментов гиромоторов, что приводит к снижению трудоемкости способа прогнозирования переменной составляющей нулевого сигнала ДУС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2014 |
|
RU2564829C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
Изобретение относится к измерительной технике, а именно к средствам измерения вибрационных реактивных моментов гиромоторов. Стенд содержит подвес, камеру, допускающую закрепление гиромотора экваториальной либо полярной осями вдоль оси подвеса, средство измерения вибраций в виде первого магнитоэлектрического датчика, обмотки которого закреплены в корпусе устройства в поле магнитов, установленных на оси подвеса, и состыкованы через измерительный усилитель со средством измерения сигнала и усилителем мощности, нагрузкой которого являются обмотки второго магнитоэлектрического датчика, установленного соосно с первым датчиком, подвес выполнен в виде вала, соединенного с камерой и вертикально установленного в подшипниках корпуса, расположенного на подставке; токоподводы гиромотора выполнены в виде трех пружин, противоположные концы которых через контактные платы стыкуются с камерой и корпусом стенда. Техническим результатом является повышение точности и технологичности контроля вибрационных реактивных моментов гиромотора на этапе его изготовления. 4 ил.
Стенд для измерения вибрационных реактивных моментов гиромотора, содержащий подвес, камеру, обеспечивающую закрепление гиромотора либо экваториальной, либо полярной осями вдоль оси подвеса, первый магнитоэлектрический датчик, обмотка которого соединена через измерительный усилитель со средством измерения сигналов и закреплена на корпусе стенда в поле магнита, установленного на оси подвеса, отличающийся тем, что введены второй магнитоэлектрический датчик, соосно установленный и аналогично закрепленный с первым датчиком, усилитель мощности, выходом соединенный с обмоткой второго датчика, а входом соединенный с выходом измерительного усилителя, и токоподводы с возможностью изменения коэффициента жесткости, при этом подвес выполнен в виде вала, соединенного с камерой и установленного в подшипниках корпуса стенда, а концы токоподводов стыкуются с камерой и корпусом стенда.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОПОР РОТОРА ГИРОСКОПА | 1988 |
|
SU1840748A1 |
| СПОСОБ ДИАГНОСТИКИ РОТОРА ГИРОСКОПА НА ГАЗОДИНАМИЧЕСКОЙ ОПОРЕ | 1984 |
|
SU1840738A1 |
| RU 2075042 C1, 11.05.1993 | |||
| US 3883812 A, 13.05.1975 | |||

