Настоящее изобретение касается машины для разравнивания щебня, имеющей машинную раму, перемещаемую на ходовых тележках по рельсовому пути, которая имеет переставляемый с помощью привода относительно машинной рамы планировщик балластной призмы для балластировки щебнем рельсового пути, а также устройство управления, а также способа балластировки щебнем рельсового пути.
Такая машина для разравнивания щебня известна, например, из патента US 5094018, при этом планировщик балластной призмы выполнен из среднего плуга, расположенного над шпалами, и из боковых плугов, расположенных соответственно по бокам от него в районе боковых плоскостей щебеночного балластного слоя. Такие машины для разравнивания щебня предназначены для балластировки щебнем рельсового пути, при этом в данном случае к участкам рельсового пути, на которых имеется недостаточное количество щебня, может подаваться из бункера новый щебень.
Далее из патента US 4986189 известна машина для подбивки рельсового пути, при этом подбивочные инструменты выполнены с возможностью поворота в поперечном направлении относительно продольной оси машины для обхода препятствий, возникающих при подбивке, в частности стрелочных перегонов. Перед машиной в направлении ее рабочего движения располагается ощупывающее устройство, образованное из нескольких чувствительных элементов, расположенных рядом друг с другом в поперечном направлении машины. Это устройство соединяется через устройство управления с приводами для перемещения по высоте шпалоподбивочного агрегата, а также для поворота подбивочных инструментов. Как только ощупывающее устройство наталкивается на препятствие, возникающее при подбивке, происходит смещенное по времени включение соответствующего привода, например, для поворота подбивочного инструмента, находящегося над препятствием, возникающем при подбивке. Таким образом, несмотря на препятствие, возникшее при подбивке, шпалоподбивочный агрегат с остальными подбивочными инструментами может опускаться для подбивки рельсового пути. Соответствующее положение подбивочных инструментов регистрируется соответствующим позиционным датчиком.
Далее известны еще, например, из патентов US 3705772, ЕР 0487465A и US 4179216 перемещающиеся по рельсовому пути машины, которые оборудованы бесконтактным ощупывающим устройством для зондирования габарита приближения строения.
Задача настоящего изобретения состоит в том, чтобы создать машину для разравнивания щебня указанного типа, с помощью которой можно выполнять равномерную балластировку щебнем рельсового пути.
Эта задача решается в соответствии с настоящим изобретением с помощью описанной выше машины для разравнивания щебня благодаря тому, что:
a) в рабочем направлении движения машины для разравнивания щебня устанавливается перед планировщиком балластной призмы бесконтактное ощупывающее устройство для определения действительного профиля балластной призмы, проходящего перпендикулярно относительно направления рельсового пути или же продольной оси машины;
b) планировщик балластной призмы имеет позиционный датчик для определения относительного изменения положения относительно машинной рамы;
c) устройство управления имеет накопительный блок для накопления данных о заданном профиле балластной призмы.
С помощью такой специальной комбинации признаков стало впервые возможным регистрировать состояние балластировки рельсового пути непосредственно перед применением плуга и затем целенаправленно выполнять балластировку при одновременном определении участков рельсового пути, имеющих недостаток или же избыток щебня. Благодаря позиционному датчику обслуживающий персонал имеет возможность регистрировать в любое время положение планировщика балластной призмы относительно действительного профиля щебня балластной призмы, а также относительно заданного профиля щебня балластной призмы, например, на мониторе и в случае необходимости выполнять соответствующее управление. Такое управление может осуществляться выгодным образом также с помощью компьютерной программы автоматически.
Предпочтительные варианты выполнения изобретения описываются в зависимых пунктах формулы изобретения и показаны на чертежах.
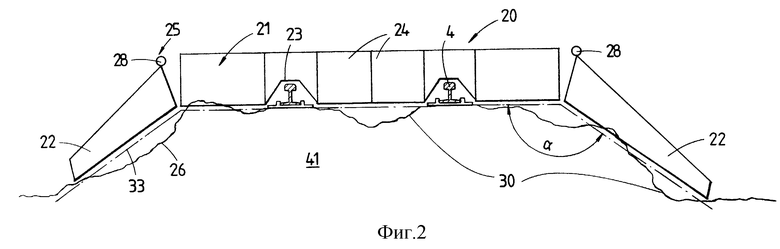
Фиг. 1 показывает вид сбоку машины для разравнивания щебня с регулируемым планировщиком балластной призмы для балластировки щебнем рельсового пути.
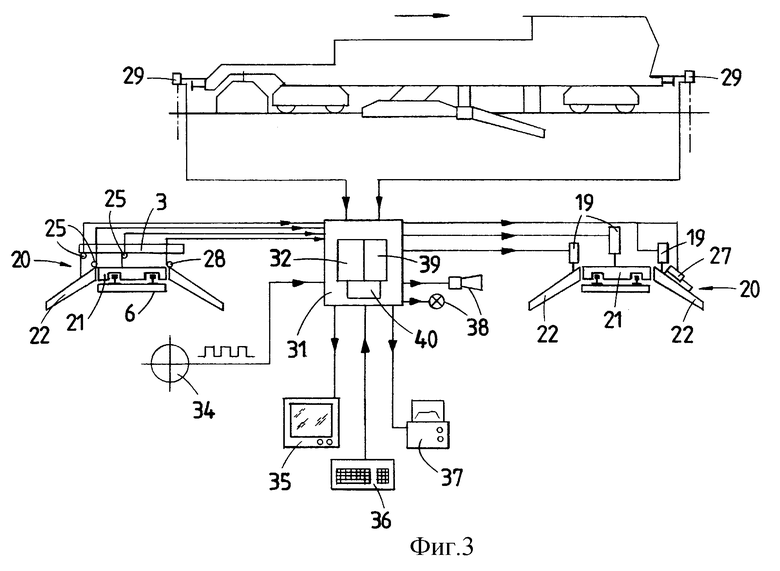
Фиг. 2 показывает напластование действительного профиля балластной призмы и заданного профиля балластной призмы с упрощенным изображением планировщика балластной призмы.
Фиг. 3 показывает упрощенную схему бесконтактного ощупывающего устройства для определения действительного профиля балластной призмы.
Показанная на фиг. 1 машина 1 для разравнивания щебня, называемая также как планировщик балластной призмы, имеет опирающуюся на рельсовые ходовые тележки 2 машинную раму 3 и перемещается по рельсовому пути 6, образованному из рельсов 4 и шпал 5. Мотор 7 предназначен для включения ходового привода 8, а также различных других приводов.
На машинной раме 3 находится бункер для щебня 9, который имеет вместо днища днищевой ленточный транспортер 11, приводимый в движение приводом 10. На заднем конце машины располагается подметающая щетка 14, переставляемая по высоте приводом 12 и приводимая во вращательное движение другим приводом 13. С помощью этой щетки может подаваться излишний щебень с рельсового пути 6 по ленточному транспортеру 15 в бункер 9 для щебня. На переднем относительно направления рабочего движения (стрелка 16) машины 1 конце бункера 9 для щебня располагается соответственно для каждого рельса 4 разгрузочное отверстие 17 с приводом 18 для регулирования разгружаемого количества щебня.
Между обеими рельсовыми ходовыми тележками 2 находится переставляемый по высоте с помощью привода 19 планировщик 20 балластной призмы для балластировки щебнем рельсового пути 6. Этот планировщик 20 балластной призмы состоит, например, из среднего плуга 21, расположенного посередине относительно поперечного направления машины, и соответственно из расположенных по бокам от него боковых плугов 22. Показанный схематически на фиг. 2 средний плуг 21 имеет рельсовый туннель 23 для накрывания рельсов 4 и предназначен для балластировки щебнем шпал 5. Расположенный между рельсами 4 участок среднего плуга 21 имеет расположенные Х-образно и переставляемые независимо друг от друга по высоте с помощью отдельных приводов плиты 24 для направления щебня, которые, например, известны из патента US 4249325 и предназначены для выборочного направления потока щебня. Для определения относительного изменения положения планировщика 20 балластной призмы относительно машинной рамы 3 имеется позиционный датчик 25, выполненный, например, как тросовый потенциометр. Каждый боковой плуг 22, предназначенный для разравнивания боковых поверхностей 26 щебеночного балластного слоя (фиг. 2) балластной призмы 41, имеет дополнительные приводы 27 для изменения углового положения относительно боковых поверхностей 26 щебеночного балластного слоя. Для определения угла наклона боковой поверхности имеется соответственно измеритель угла 28, выполненный как позиционный датчик 25.
Перед передним концом машины 1, т.е. в рабочем направлении движения перед планировщиком балластной призмы 20 находится действующее бесконтактным способом ощупывающее устройство 29 для определения действительного профиля 30 балластной призмы 41, проходящего в перпендикулярном направлении относительно рельсового пути или же продольной оси машины. В рабочем направлении машины 1 позади планировщика 20 балластной призмы располагается другое аналогичное ощупывающее устройство 29 для определения действительного профиля 30 балластной призмы.
Ощупывающее устройство 29 может состоять, например, из лазерного сканнера, который ощупывает свое окружение в двух измерениях и функционирует по принципу измерения длительности импульса. Для этого направляется пульсирующий лазерный луч. Если на объект или же на щебень попадает лазерный импульс, то отражается он и регистрируется в приемнике ощупывающего устройства 29. Период времени с момента излучения и до приема импульса прямо пропорционален расстоянию между ощупывающим устройством 29 и объектом (время прохождения луча). Благодаря внутреннему вращающемуся зеркалу пульсирующий лазерный луч отклоняется и тем самым ощупывается объемное пространство. На основании последовательности принятых импульсов рассчитывается контур объекта. Данные измерений предоставляются своевременно.
Как можно, в частности увидеть, на фиг. 3 соединяются оба ощупывающих устройства 29, приводы 19, 27 планировщика балластной призмы 20, а также его позиционный датчик 25 с устройством управления 31. Это устройство имеет накопительный блок 32 для накопления заданного профиля 33 балластной призмы (см. штрихпунктирная линия на фиг. 2). Кроме того, соединяются дополнительно еще следующие устройства с устройством управления 31: датчик пути 34, монитор 35, клавиатура 36, принтер 37, а также оптическое и/или звуковое сигнальное устройство 38. Устройство управления 31 имеет, кроме того, дифференциальный блок 39 для определения разницы между действительным профилем 30 балластной призмы и заданным профилем 33 балластной призмы. Компьютерная программа 40 используется для определения оптимального положения планировщика 20 балластной призмы относительно изменяющихся количеств щебня и его автоматической перестановки.
Во время работы машины для разравнивания щебня 1 ощупывается непосредственно перед балластировкой щебнем с помощью переднего ощупывающего устройства 29 действительный профиль 30 балластной призмы и накапливается временно на регистре сдвига. Как только подается с помощью датчика пути 34 количество импульсов, соответствующее расстоянию между передним ощупывающим устройством 29 и планировщиком 20 балластной призмы, то передается дальше накопленный действительный профиль 30 балластной призмы на монитор 35. Там происходит напластование накопленного заданного профиля 33 балластной призмы с учетом верхней кромки рельсов, служащей в качестве общей базовой плоскости (см. фиг. 2). Параллельно с этим показывается на мониторе 35 зарегистрированное позиционным датчиком 25 действительное положение среднего плуга 21 и обоих боковых плугов 22 относительно балластной призмы 41. Затем имеется возможность для того, чтобы обслуживающий персонал управлял вручную углом наклона боковых плугов 22, перестановкой по высоте общего планировщика 20 балластной призмы или же соответствующим положением плит 24 для направления щебня в соответствии с полученной оптически разницей между действительным профилем 30 балластной призмы и заданным профилем 33 балластной призмы с целью получения оптимально равномерной балластировки щебнем. В противоположность этому существует однако также возможность осуществлять это управление автоматически с помощью компьютерной программы 40.
Если, например, определяется с помощью дифференциального блока 39 избыток щебня на правой поверхности щебеночного балластного слоя, то может происходить благодаря автоматическому управлению обоими боковыми плугами 22, а также плитами для направления щебня 24 постоянный отвод избыточного количества щебня с правой на левую поверхность щебеночного балластного слоя. В результате выполненного датчиком пути 34 измерения пройденного машиной 1 пути может также рассчитываться непрерывно недостающее или же избыточное количество щебня. Для этой цели образуется с помощью дифференциального блока 39 выявленная разница поверхностей между действительным профилем 30 балластной призмы и заданным профилем 33 балластной призмы и умножается на замеренный пройденный путь. Для того случая, когда переходят границу допустимого недостатка щебня, может включаться автоматически привод 18 для открывания разгрузочного отверстия 17 накопителя щебня 9. Тем самым происходит в случае необходимости автоматическая подача щебня на левую и/или правую половину рельсового пути.
Поскольку регистрация профиля балластной призмы происходит в рабочем направлении движения перед планировщиком 20 балластной призмы, то могут также регистрироваться путем измерения препятствия, например, мачты контактных проводов, стрелочные устройства, токоведущие шины и т.д. и автоматически выполняться соответствующая перестановка по высоте элементов плуга или подметающей щетки 14, находящихся в районе препятствуя.
С помощью заднего ощупывающего устройства 29 существует возможность регистрировать действительно выполненную в результате применения планировщика 20 балластной призмы балластировку щебнем рельсового пути 6, при этом ощупывается во время рабочего движения машины 1 имеющийся действительный профиль 30 балластной призмы и сравнивается описанным образом с накопленным заданным профилем 33 балластной призмы. Результат может быть задокументирован с помощью принтера 37. При этом подводится надежный баланс относительно недостатка или избытка щебня.
Машина для разравнивания щебня с машинной рамой, перемещаемой на рельсовых ходовых тележках, оборудована переставляемым планировщиком балластной призмы для балластировки рельсового пути. В рабочем направлении движения машины для разравнивания щебня устанавливается перед планировщиком балластной призмы бесконтактное ощупывающее устройство для определения действительного профиля балластной призмы, проходящего перпендикулярно относительно продольного направления рельсового пути или же продольной оси машины. Планировщик балластной призмы имеет позиционные датчики для определения относительного изменения положения относительно машинной рамы. Устройство управления имеет накопительный блок для накопления данных о заданном профиле балластной призмы. Тем самым существует возможность определять участки рельсового пути с недостаточным или же избыточным количеством щебня и управлять соответственно планировщиком балластной призмы для равномерной балластировки щебнем рельсового пути. 2 с. и 6 з.п. ф-лы, 3 ил.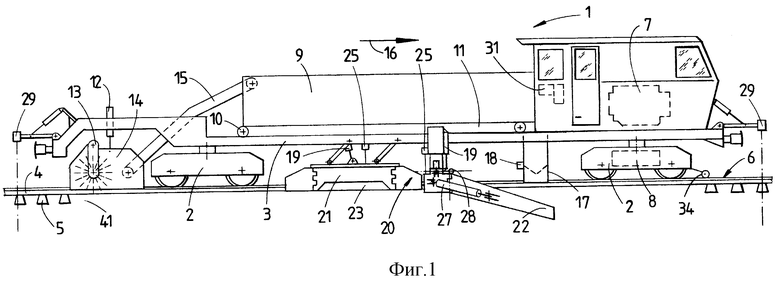
| US 5094018 A, 10.03.1992 | |||
| Машина для перераспределения щебня балластной призмы железнодорожного пути | 1990 |
|
SU1777615A3 |
| Машина для распределения и профилирования балласта железнодорожного пути | 1988 |
|
SU1584756A3 |
| US 4497256 A, 05.02.1985 | |||
| МАШИНА ДЛЯ УПЛОТНЕНИЯ И ПРОФИЛИРОВАНИЯ ЩЕБЕНОЧНОГО БАЛЛАСТНОГО СЛОЯ РЕЛЬСОВОГО ПУТИ | 1998 |
|
RU2131955C1 |

