Изобретение относится к подъемно-транспортному машиностроению, а именно к крановым грузозахватным устройствам для штучных грузов типа контейнеров.
Известно крановое грузозахватное устройство для штучных грузов типа контейнеров, состоящее из силовой рамы и шарнирно сочлененных с ней челюстей с силовым приводом их перемещения для обжатия грузов типа контейнеров, пакетов и т. п. (см. Крановые грузозахватные устройства, А.А.Вайнсон и А.Ф.Андреев, М., 1982, с. 187, рис. 3.8.1.).
Наиболее близким является грузозахватное устройство с электрогидравлическим приводом поворота челюстей (грейфер), состоящий из силовой рамы и шарнирно сочлененных с ней челюстей, связанных между собой жесткими тягами синхронизатора и силовыми цилиндрами для привода поворота челюстей (см. "Грейфер с переменной площадью зева" ж. "Лесная промышленность" N 5 за 1980 , с. 13).
Конструкции этих грузозахватных устройств или не позволяют производить погрузочно-разгрузочные операции с контейнерами для металлопроката, или позволяют производить погрузочно-разгрузочные операции только с контейнерами одного конструктивного исполнения или одних геометрических размеров по длине, ширине, высоте.
Технической задачей заявляемого устройства является обеспечение погрузочно-разгрузочных операций с контейнерами для металлопроката с различными геометрическими размерами по длине, ширине, высоте, а также различными конструктивными решениями для силового подхвата контейнера.
Указанная техническая задача решается тем, что челюсти захвата выполнены Т-образными по длине, а их концы с внутренней стороны снабжены фигурными отверстиями для взаимодействия с силовыми кронштейнами, причем отверстия на концах челюстей выполнены Г-образными и расположены по длине челюсти в соответствии с размерами контейнеров.
Сущность предложенного изобретения поясняется чертежами, где на:
фиг. 1 - изображен общий вид захвата;
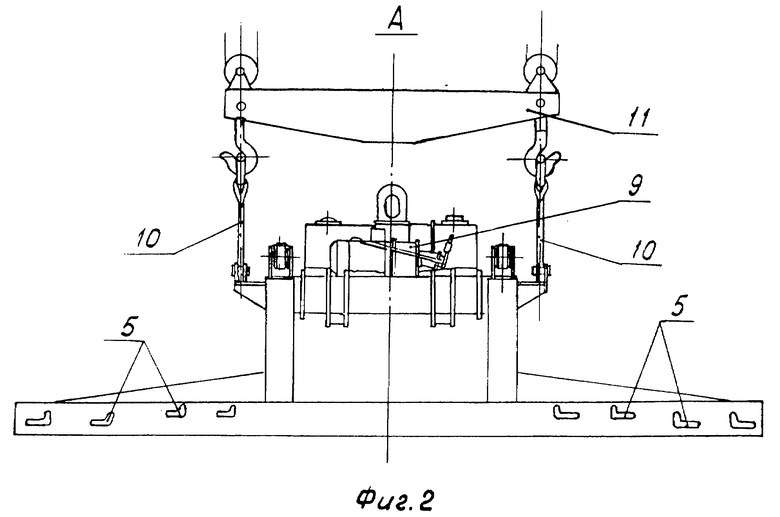
фиг. 2 - то же, вид по стрелке A; силовые кронштейны условно не показаны;
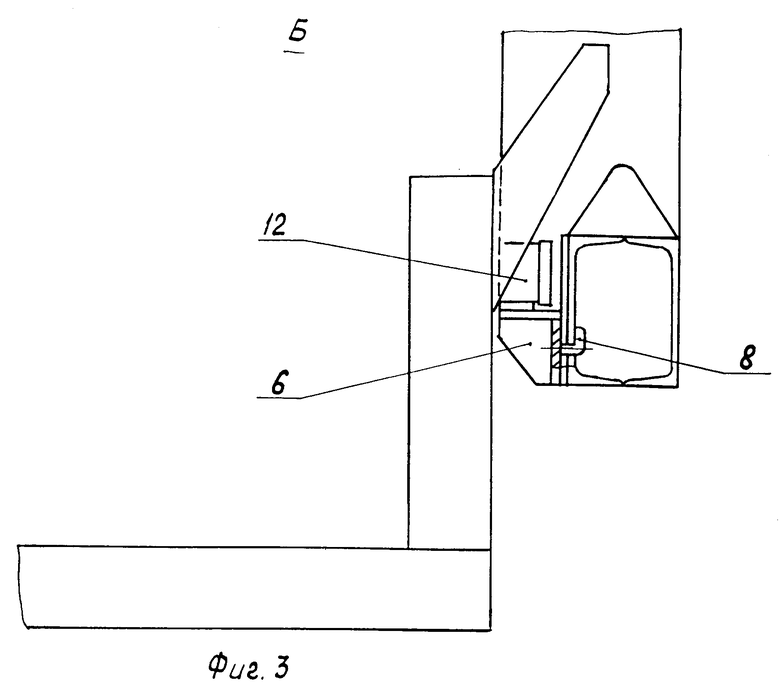
фиг. 3 - то же, узел I укрупненно с подхватом контейнера за бобышку;
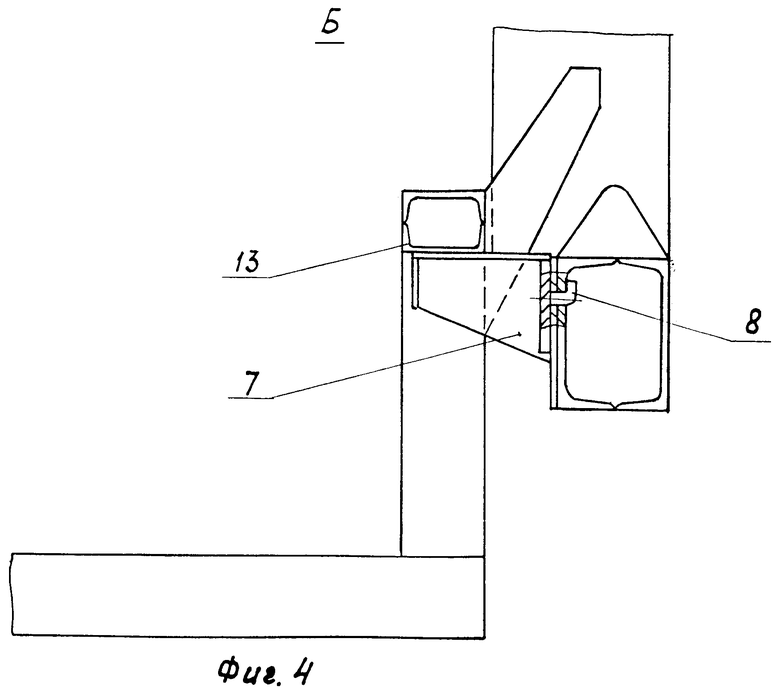
фиг. 4 - то же, узел I укрупненно с подхватом контейнера за верхнюю балку.
Захват для контейнеров состоит из силовой рамы 1 и шарнирно сочлененных с ней челюстей 2, связанных между собой жесткими тягами синхронизаторов 3 и силовыми цилиндрами 4.
Челюсти 2 захвата выполнены Т-образными по длине, концы которых с внутренней стороны снабжены Г-образными отверстиями 5 для взаимодействия с силовыми кронштейнами 6 и 7.
Силовые кронштейны 6 и 7 снабжены со стороны прилегающей плоскости упорами 8 для взаимодействия с отверстиями 5 в челюстях 2, которые расположены по длине Т-образных челюстей 2 в соответствии с размерами существующих контейнеров для металлопроката.
На раме 1 захвата установлен гидропривод 9, состоящий из электродвигателя, насоса, пускорегулирующей аппаратуры и трубопроводов. Рама 1 выполнена пустотелой для размещения в ней гидробака.
Захват при помощи строп 10 монтируется (подвешивается) к грузовой траверсе 11 грузоподъемного крана.
Захват работает следующим образом. Управление захватом осуществляет крановщик из кабины крана.
Включив привод насоса, крановщик управляет подачей рабочей жидкости в гидроцилиндры 4, которые поворачивают челюсть 2 относительно рамы 1.
Поворот челюстей 2 происходит от максимально открытого положения до максимально закрытого положения по размеру "b" фиг. 1, который регулируется для каждого размера металлоконтейнера с помощью длины проушин штока гидроцилиндров 4. Это необходимо для того, чтобы не деформировать металлоконтейнер, как правило не рассчитанный на восприятие боковых и радиальных нагрузок.
Для каждого типа контейнеров при выполнении погрузочно-разгрузочных операций применяется свой силовой кронштейн 6 или 7.
Так для контейнера конструкции по фиг. 1 силовым элементом является балка 12, применяется силовой кронштейн 6, для контейнеров по фиг. 2 силовым элементом является балка 13, применяется силовой кронштейн 7.
Поэтому перед выполнением погрузочно-разгрузочных операций захват должен быть соответствующим образом подготовлен.
Для этого в зависимости от типа контейнера выбирают силовой кронштейн 6 или 7 и устанавливают их упорами 8 в отверстиях 5 челюстей 2, в тех отверстиях, которые необходимы для данного типоразмера контейнера.
Затем захват с раскрытыми челюстями 2 подается краном к металлоконтейнеру, опускается на него, включается поворот челюстей 2, которые силовыми кронштейнами 6 или 7 подхватывают контейнер за балки 12 или за балки 13.
Благодаря синхронному повороту челюстей 2 с помощью синхронизаторов 3, а также отрегулированного размера "b" по ширине данного типа контейнера челюсти 2 равномерно охватывают контейнер, не деформируя его.
Затем включается механизм подъема, контейнер переносится и устанавливается в кассету, включается разжим челюстей 2 и захват готов к повторению операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| АВТОТРАНСПОРТНОЕ СРЕДСТВО С ГРУЗОПОДЪЕМНЫМ УСТРОЙСТВОМ | 1995 |
|
RU2091255C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| ГИДРАВЛИЧЕСКИЙ ЗАХВАТ МАНИПУЛЯТОРА | 2002 |
|
RU2231440C2 |
| Грузозахватное устройство | 1979 |
|
SU922027A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2217899C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Грузозахватное устройство | 1988 |
|
SU1627496A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
Захват предназначен для взаимодействия с контейнерами и используется в крановых грузозахватных устройствах. Захват содержит силовую раму и шарнирно сочлененные с ней челюсти, связанные между собой жесткими тягами синхронизатора и силовыми гидроцилиндрами. Челюсти захвата выполнены Т-образными по длине и их концы с внутренней стороны снабжены фигурными отверстиями для взаимодействия с силовыми кронштейнами. Отверстия в челюстях выполнены Г-образными и расположены по длине челюстей в соответствии с размерами контейнеров. Изобретение позволяет обеспечить погрузочно-разгрузочные работы с контейнерами различных типоразмеров. 1 з.п. ф-лы, 4 ил.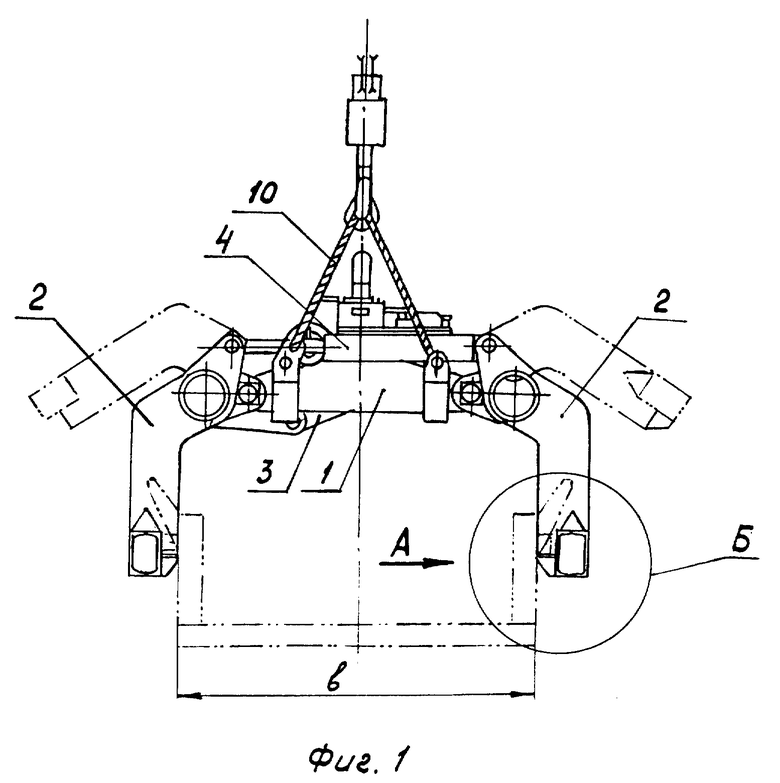
| GB 1556369 A, 21.11.79 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Насос | 1917 |
|
SU13A1 |
| Вайнсон А.А., Андреев А.Ф | |||
| - Крановые грузозахватные устройства | |||
| - М.: Машиностроение, 1982, с | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Грузозахватное устройство | 1983 |
|
SU1122604A1 |
