Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано в радионавигационных системах определения местоположения объектов, использующих режим дифференциальной коррекции.
Уровень техники.
Известны способы выделения погрешностей в спутниковых радионавигационных системах (СРНС) (см. , например, Шебшаевич В.С., Балов А.В., Химулин В.И. "Развитие дифференциального метода навигационных определений в спутниковой РНС ГЛОНАСС", Радионавигация и время, РИРВ, 1992, "Глобальная система местоопределения (GPS)" или "Navstar", Navigation (USA), 1978, v. 25, N 2). Эти способы основаны на определении дифференциальных погрешностей в априорно известной точке пространства и распространении их действия на прилежащую область, именуемую рабочей зоной опорной станции. В пределах рабочей зоны максимальная точность достигается в центре и убывает к ее периферии, ограничивая тем самым размер рабочей области.
Для уменьшения погрешности в крупных регионах требуется развернуть в том же регионе непрерывную сеть из опорных станций и аппроксимировать поправки от соседних станций для сглаживания ошибок в пределах рабочей зоны региона (патент US N 5621646, 1997 г.). Поскольку градиент поля погрешностей в произвольной точке между станциями неизвестен, а также изменяется при движении спутника, то для аппроксимации можно использовать только простейший полином первого порядка, что не позволяет получить достаточную точность выделения погрешностей для дифференциальной коррекции не только для расширенной, но и для локальной рабочей зоны отдельной опорной станции.
Сущность изобретения.
Для повышения точности определения погрешностей предлагается выделять векторные и скалярные погрешности, которые в совокупности и позволяют повысить точность. Это достигается за счет того, что способ выделения погрешностей в спутниковой радионавигационной системе заключается в приеме навигационных сигналов от i спутников, где i = 2, 3,..., n на наземных измерительных пунктах, один из которых является опорным. В наземных измерительных пунктах, номера которых j = 0, 1, 2,..., N производят измерение псевдодальности и псевдоскорости. Результаты этих измерений от каждого наземного измерительного пункта передают в центр обработки, в котором сначала определяют векторные погрешности, а затем скалярные погрешности, которые определяют с помощью результатов, полученных на опорном измерительном пункте, при этом указанные погрешности определяют из выражений: Rизмij = DDij + С Δ tнипj + Δ DDcпi
где DDij = [(Xi-xj)2 + (Yi-yj)2 + (Zi-zj)2]0.5,
С - скорость света,
Δ tнипj - смещение шкалы времени j-го наземного измерительного пункта,
xj, yj, zj - априорные координаты j-го наземного измерительного пункта,
Δ DDспi VΔDDi- скалярные погрешности соответственно для псевдодальности и псевдоскорости, вектор действительных координат i-го спутника, представленный в виде транспонированной (т) матрицы-строки,
вектор действительных координат i-го спутника, представленный в виде транспонированной (т) матрицы-строки, вектор действительной скорости i-го спутника, представленный в виде транспонированной матрицы-строки,
вектор действительной скорости i-го спутника, представленный в виде транспонированной матрицы-строки, априорные (по данным эфимерид) координаты и скорость i-го спутника, представленные в виде транспонированной матрицы-строки,
априорные (по данным эфимерид) координаты и скорость i-го спутника, представленные в виде транспонированной матрицы-строки, векторные погрешности для координат и скорости i-го спутника соответственно, представленные в виде транспонированной матрицы- строки,
векторные погрешности для координат и скорости i-го спутника соответственно, представленные в виде транспонированной матрицы- строки,
λ - длина волны сигнала спутника,
f0i, fпj - частота опорного генератора на i-м спутнике и j-м наземном измерительном пункте соответственно,
а полученные скалярные погрешности усредняют на заданном интервале.
На чертеже представлен пример реализации способа в соответствии с изобретением, где показано:
1 - система радионавигационных спутников;
20 - опорный наземный измерительный пункт;
21-2N - наземные измерительные пункты;
3 - канал связи;
4 - центр обработки.
Сведения, подтверждающие возможность осуществления изобретения.
Предложенный способ поясняется конкретным примером осуществления. Навигационные сигналы, излучаемые системой 1 радионавигационных спутников, принимаются всеми наземными измерительными пунктами 20-2N (НИП). В измерительных пунктах производят измерение соответствующих псевдодальностей и псевдоскоростей. Результаты этих измерений от каждого измерительного пункта, находящегося в зоне действия системы 1 радионавигационных спутников, передают по каналу связи 3 в центр обработки 4. В центре обработки 4 по принятым результатам определяют сначала векторные погрешности из выражений:
Rизмij = DDij + C Δ tнипi + ΔDDспi
где DDij=[(Xi-xj)2 + (Yi + yj)2 + (Zi-zj)2]0.5
С - скорость света,
Δ tнипi - смещение шкалы времени j-гo наземного измерительного пункта,
xj, yj, zj - априорные координаты j-го наземного измерительного пункта,
Δ DDспi, VΔDDi - скалярные погрешности соответственно для псевдодальности и псевдоскорости, вектор действительных координат i-го спутника, представленный в виде транспонированной матрицы-строки,
вектор действительных координат i-го спутника, представленный в виде транспонированной матрицы-строки, вектор действительной скорости i-го спутника, представленный в виде транспонированной матрицы-строки,
вектор действительной скорости i-го спутника, представленный в виде транспонированной матрицы-строки, априорные (по данным эфимерид) координаты и скорость i-го спутника, представленные в виде транспонированной матрицы-строки,
априорные (по данным эфимерид) координаты и скорость i-го спутника, представленные в виде транспонированной матрицы-строки, векторные погрешности для координат и скорости i-го спутника соответственно, представленные в виде транспонированной матрицы-строки,
векторные погрешности для координат и скорости i-го спутника соответственно, представленные в виде транспонированной матрицы-строки,
λ - длина волны сигнала спутника,
f0i, fпj - частота опорного генератора на i-м спутнике и j-м наземном измерительном пункте соответственно.
Уравнения (1) можно записать в виде:
где F1 и F2 означают функционал (1)
Для определения массива погрешностей решается обратная навигационная задача: выбрав за опорные точки пространства точки расположения наземных измерительных пунктов (НИП) 20 - 2N, задаваемых в системе уравнений (1) векторами:
определяют вектор действительного текущего положения каждого видимого спутника. Векторные погрешности получаются как разность между действительными и априорными (эфемеридными) векторами спутника.
Ограниченная сеть НИП 20 - 2N состоит из нескольких независимых, двухчастотных, геодезически привязанных приемников, расположенных на максимально возможном удалении, которые проводят автономные измерения псевдодальности и псевдоскорости относительно собственного эталона времени и частоты (ЭВЧ). НИП 20 в сети выбран в качестве опорного и проводит измерения относительно ЭВЧ системы радионавигационных спутников. Никакой синхронизации и сверки шкал между пунктами не требуется.
Сначала по результатам проведенных измерений строится система нелинейных уравнений относительно следующих неизвестных:
- компонент действительного вектора координат спутников:
- компонент действительного вектора скорости спутников:
- скалярных погрешностей к дальностям и скоростям:
ΔDDспi, VΔDDi
- смещений шкал времени Δ tНИПj и частот Δ fij опорного генератора (на чертеже не показан) каждого НИП 2:
Δ tНИПj, Δ fij = (f0i - fпj),
где j = 0,1,2,...,N, i=2,3,...,n
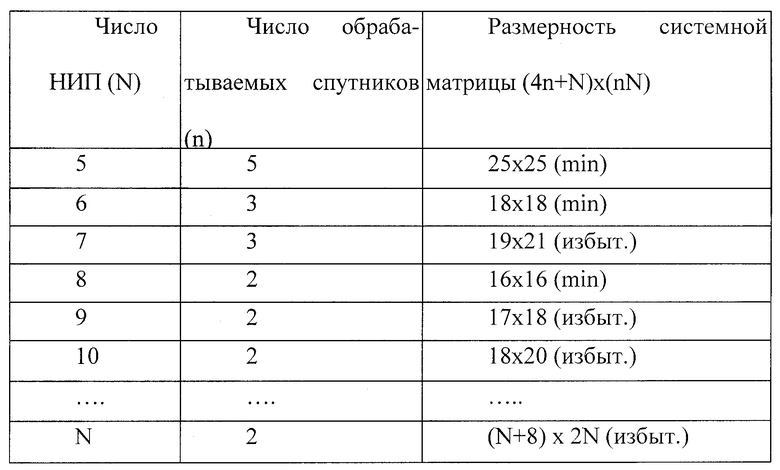
Общее число неизвестных в системе определяется числом (N) НИП 2 в сети и числом (n) обрабатываемых спутников (сп.). Минимальное число спутников nmin= 2. Число уравнений в системе должно удовлетворять неравенству:
nN ≥ 4n+N,
откуда следует соотношение между числом НИП в сети и числом наблюдаемых спутников, что и показано в нижеследующей таблице. Там же указана и размерность матрицы системы уравнений.
Система нелинейных уравнений для координат может быть записана в следующем виде: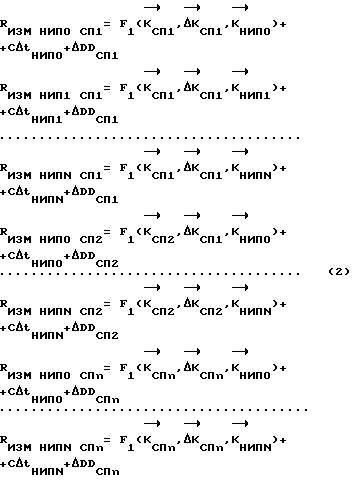
Аналогичная система записывается для скоростей: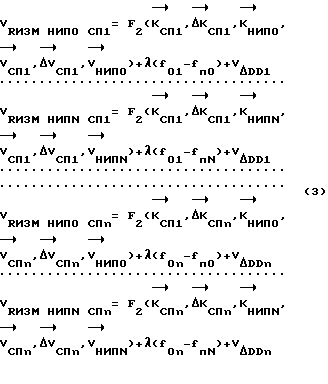
Как видно, системы (2) и (3) - уравнения второго порядка в общем виде. Численное решение таких уравнений может быть найдено с помощью широко распространенного в спутниковых радионавигационных системах (СРНС) метода наименьших квадратов (МНК). Для получения быстрой сходимости решения системы (2) и (3) должны быть приведены к виду с общим постоянным членом в правой части уравнений. Это может быть сделано путем перехода к разностным уравнениям: взяв первые разности для каждого спутника между измерениями НИП 2j, где j = 1,2,3...N, и НИП 20, а затем вторые разности по спутникам, получим искомый вид системы. Например, при n = 2 спутниках и N = 8 НИП 2, система разностных уравнений для координат запишется в виде:
Система (4) из 8 уравнений с 6 неизвестными имеет стандартный для навигационной задачи СРНС вид и решается известным способом (МНК) относительно действительных координат спутников
Аналогично путем взятия первых и вторых разностей так же преобразуют (3) в систему разностных уравнений, которую после подстановки уже найденных выше действительных координат решают относительно действительных скоростей спутников:
Найденный полный вектор действительного положения спутника (т.е. вектор его координат и скорости) позволяет теперь вычислить искомые векторные погрешности к их эфемеридным значениям:
После этого переходят ко второму этапу обработки - определению скалярных погрешностей.
Для получения скалярных погрешностей используется метод измерения радионавигационных параметров относительно ЭВЧ спутниковой РНС при снятых векторных погрешностях. Для их вычисления используются измерения, полученные на опорном НИП 20. Уравнения (1) для момента времени (t) записываются в виде:
где Δ tНИП0 - известные смещения шкалы времени для НИП 20,
ErrΔtНИПo, ErrΔfНИПo- погрешности синхронизации по времени и частоте НИП 20.
Подставляя в (5) текущие результаты измерений, найденные выше действительные координаты и скорости спутника, а также априорно известные смещения шкал времени и частоты опорного генератора для НИП 20, вычисляют текущие значения скалярных погрешностей. Окончательные значения скалярных погрешностей получают после их усреднения:
где m - объем выборки измерений.
Интервал усреднения выбирается исходя из соотношения шумовой погрешности используемого приемника и допустимой погрешности измерения скалярных погрешностей.
Поскольку погрешности синхронизации эталона времени и частоты НИП 20 входят во все скалярные погрешности, то для конечного потребителя на точность его местоопределения они не повлияют.
Итак, в предлагаемом способе для каждого спутника вместо одной дифференциальной погрешности определяется расширенный массив следующих скалярно-векторных погрешностей:
которые не связаны с местоположением опорной станции и в сумме компенсируют погрешности РНС в любой точке зоны радиовидимости спутника.
В зависимости от требований конечных пользователей механизм применения предлагаемых скалярно-векторных погрешностей может быть различен. Это может быть:
1. передача погрешностей в центр управления базовой РНС для коррекции оперативной информации спутников,
2. пересчет в привычные дифференциальные погрешности с центром рабочей зоны, выбираемым по усмотрению пользователей. В качестве такого центра могут быть выбраны как координаты центра желаемой зоны высокоточной навигации объектов, так и местоположение отдельного потребителя. Поскольку интервал корреляции дифференциальных погрешностей измеряется десятками километров, то погрешность априорных координат центра может достигать нескольких километров. Это позволяет не проводить дополнительных уточняющих местоопределений в выбранной точке центра;
3. ввод скалярно-векторных погрешностей непосредственно в аппаратуру пользователей для прямой коррекции результатов измерений (если такой режим поддерживается математическим обеспечением аппаратуры).
Для этого:
а) при коррекции оперативной информации спутников каждую компоненту массива погрешностей:
складывают с текущим значением соответствующего параметра передаваемой со спутника оперативной информации - векторами текущих координат и скорости спутника, а также со смещением бортовой шкалы времени спутника относительно шкалы СРНС и прогнозируемым уходом номинала частоты его опорного генератора. После этого к потребителю будут попадать эфемериды с уже снятыми погрешностями и никакой дополнительной коррекции ему проводить не потребуется;
б) при пересчете скалярно - векторных погрешностей в дифференциальные с избранным центром локальной рабочей зоны в точке  используют формулы:
используют формулы:
Diffкоордi= |ΔKСПi|cos(γ1)+ΔDDспi
Diffскорi= |ΔVСПi|cos(γ2)+ΔVΔDDi,
где γ1 и γ2 - углы между соответствующими векторами погрешностей  и линией визирования спутника из точки
и линией визирования спутника из точки  для которой рассчитываются обычные дифференциальные погрешности.
для которой рассчитываются обычные дифференциальные погрешности.
в) при непосредственном вводе скалярно - векторных погрешностей в аппаратуру потребителя сначала корректируются априорные (эфимеридные) параметры спутника
а затем обычным порядком решается навигационная задача (1).
Для специалистов в указанной области и других областях при ознакомлении с настоящим описанием будут ясны другие возможные модификации данного изобретения. Такие модификации могут включать другие известные по предшествующему уровню техники признаки. Описанный выше вариант реализации системы не исчерпывает все их многообразие, которое можно осуществить в соответствии с нижеследующей формулой изобретения.
Формула изобретения составлена без ограничительной части, т. к. она в таком виде более четко отражает сущность изобретения.
Изобретение относится к радиотехнике и предназначено для повышения точности радионавигационных систем определения местоположения. Это достигается за счет того, что способ выделения погрешностей в спутниковой радионавигационной системе основан на приеме навигационных сигналов от спутников на наземных измерительных пунктах, один из которых является опорным. В измерительных пунктах измеряют псевдодальности и псевдоскорости. Результаты этих измерений от каждого измерительного пункта передают в центр обработки, в котором определяют векторно-скалярные погрешности, из выражений: Rизмij=DDij + CΔtнипj + ΔDDcпi,  , а полученные скалярные погрешности усредняют на заданном интервале. Полученные векторно-скалярные погрешности не зависят от местоположения опорных измерительных пунктов. 1 ил., 1 табл.
, а полученные скалярные погрешности усредняют на заданном интервале. Полученные векторно-скалярные погрешности не зависят от местоположения опорных измерительных пунктов. 1 ил., 1 табл.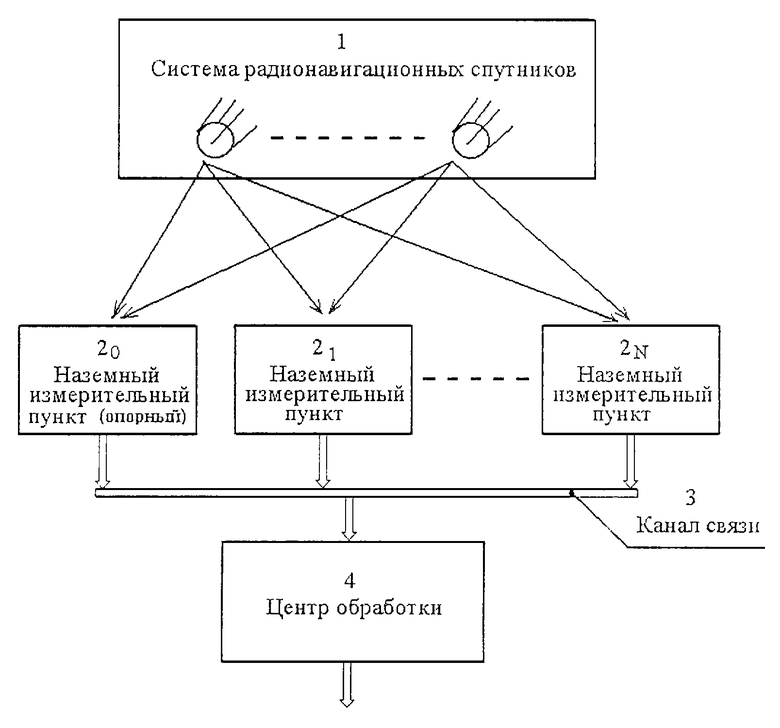
Способ определения погрешностей спутниковой радионавигационной системы, заключающийся в том, что принимают навигационные сигналы от i спутников, где i= 2,3,...,n, на наземных измерительных пунктах, номера которых j=0,1,2,..., N, измеряют на наземных измерительных пунктах соответствующие псевдодальности Rизмij и псевдоскорости VRизмij, результаты измерений от каждого наземного измерительного пункта передают по каналу связи в центр обработки, отличающийся тем, что по крайней мере, один из наземных измерительных пунктов является опорным, при этом по принятым в центре обработки результатам измерений для псевдодальности Rизмij и псевдоскорости VRизмij определяют векторные и скалярные погрешности из выражений
Rизмij=DDij+CΔtнипj+ΔDDспi,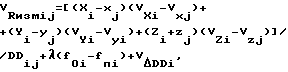
где DDij=[(Xi-xj)2+(Yi-yj)2+ (Zi-zj)2]0.5;
C - скорость света,
Δtнипj - смещение шкалы времени j-ro наземного измерительного пункта;
xj, yj, Zj - априорные координаты j-ro наземного измерительного пункта; вектор действительных координат i-ro спутника, представленный в виде транспонированной (т) матрицы - строки;
вектор действительных координат i-ro спутника, представленный в виде транспонированной (т) матрицы - строки;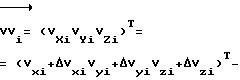 вектор действительной скорости i-ro спутника, представленный в виде транспонированной матрицы - строки;
вектор действительной скорости i-ro спутника, представленный в виде транспонированной матрицы - строки; априорные, по данным эфимерид, координаты и скорость i-го спутника, представленные в виде транспонированной матрицы - строки;
априорные, по данным эфимерид, координаты и скорость i-го спутника, представленные в виде транспонированной матрицы - строки;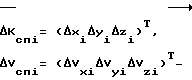 векторные погрешности для координат и скорости i-ro спутника соответственно, представленные в виде транспонированной матрицы - строки;
векторные погрешности для координат и скорости i-ro спутника соответственно, представленные в виде транспонированной матрицы - строки;
λ - длина волны сигнала спутника;
f0i, fnj - частота опорного генератора на i-м спутнике и j-м наземном измерительном пункте соответственно,
ΔDDспi, VΔDDi- скалярные погрешности соответственно для псевдодальности Rизмij и псевдоскорости VRизмij, определяемые с использованием измерений, полученных на опорном наземном измерительном пункте, при этом окончательные значения скалярных погрешностей получают после их усреднения на заданном интервале времени.
| NAVIGATION (USA), 1978, v.25, N2 | |||
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Селектор импульсов | 1981 |
|
SU961132A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| EP 0574009 A2, 15.12.1993. | |||

