Настоящее изобретение относится к устройствам предотвращения столкновений летательного аппарата (ЛА), преимущественно столкновений с землей, путем регулирования наклона траектории при заходе на посадку. Изобретение может быть использовано, главным образом, на авиалайнерах в момент приземления. В общем случае, оно предназначено для использования на любых ЛА, которые при выполнении полетного задания могут приблизиться к земле на критическую высоту, например при полете по рельефу местности, либо могут находиться в зонах воздушного пространства, где эти ЛА будут подвергаться опасности, либо сами представлять собой опасность как при взлете или посадке, так и в полете.
Известны устройства предотвращения столкновений самолетов с землей, основанные на принципе использования радиовысотомеров, счетно-решающих средств для расчета барометрической высоты по измеренным величинам давления и температуры, а также навигационной аппаратуры, такой как системы инерционной навигации или системы управления полетом. Принцип действия таких устройств заключается в обработке результатов измерений высоты относительно земли по показаниям высотомера, либо изменений высоты, измеренной радиовысотомером, или барометрической высоты. При этом барометрическая высота используется в расчетах, поскольку таким образом обеспечивается большая точность при значительных высотах по отношению к изменениям высоты по показаниям высотомера. Полученные величины дальностей относительно земли сравниваются с пороговыми значениями, которые, в свою очередь, зависят от показаний высоты, а также от конфигурации самолета, например состояния выпуска шасси, отклонений закрылков, предкрылков пр. В том случае, если измеренные значения высоты и изменений высоты, главным образом в функции времени, переходят пороговые значения, включается сигнализации для извещения экипажа. Недостатком таких устройств является существенное запаздывание выдачи результатов измерений с учетом маневренности ЛА, при этом запаздывание срабатывания сигнализации не позволяет экипажу своевременно принять меры для устранения столкновения. Другим недостатком известных устройств является возможность необоснованных срабатываний системы сигнализации, т.е. ложной сигнализации. Это может иметь место, например, при полете на достаточно безопасной высоте над местностью с рельефом, имеющим локальные возвышения, которые не представляют опасности для совершения полета, но могут являться источниками ложных срабатываний системы сигнализации, что уменьшает надежность работы устройства для предотвращения столкновений.
Усовершенствование устройства такого типа осуществлялось, главным образом, путем введения баз данных, позволяющих изменять пороговые значения с учетом географического положения ЛА, что уменьшает риск ложных срабатываний. Однако при этом возникает требование соответствия баз данных различным типам местности, т. е. необходимо располагать цифровой моделью местности, которая позволяла бы постоянно определять характер рельефа перед самолетом в функции местоположения. Однако использование такой модели требует наличия базы данных, в которой с достаточной точностью были бы зарегистрированы данные рельефа, что, в свою очередь, требует увеличения объема памяти. К этому недостатку добавляется также необходимость процедуры замены и подготовки к работе /настройки/ базы данных, что усложняет ее использование. Кроме того, большой объем зарегистрированной в памяти информации увеличивает риск возможных ошибочных срабатываний, что также необходимо учитывать.
Наконец, к недостаткам устройств для предотвращения столкновений известных типов относится требование отключения устройства при снижении ниже заданной критической высоты, главным образом при посадке, для устранения риска ложных срабатываний, вследствие чего при сближении с землей исключается возможность значительных изменений наклона траектории, главным образом направленных вниз, с учетом наличия препятствий и близости земли.
Целью изобретения является устранение этих недостатков, главным образом путем сглаживания эффекта случайных изменений рельефа за счет определения местоположения ЛА не только относительно земли, но и относительно известных критических значений высоты, при этом устройство предупреждения столкновений продолжает функционировать до момента приземления, осуществляя регулирование угла наклона траектории, обеспечивающего посадку на взлетно-посадочную полосу /ВПП/.
Это достигается тем, что устройство для предотвращения столкновений ЛА с землей при посадке характеризуется наличием следующих блоков:
- системы определения местоположения ЛА;
- базы данных, содержащей информацию относительно ВПП и связанных с ней процедур;
- первого средства сравнения, связанного с системой определения местоположения и с базой данных для сравнения данных положения ЛА с информацией, содержащейся в базе данных;
- средства определения координат точки приземления на ВПП, подсоединенного к первому средству сравнения;
- счетно-решающего устройства для расчета вектора действительного угла наклона ЛА, соединенного со средством определения координат;
- средства определения вектора теоретического угла наклона ЛА, связанного с базой данных;
- второго средства сравнения, связанного со счетно-решающим устройством вектора действительного угла наклона и со средством определения вектора теоретического угла наклона для сравнения этих двух векторов.
К основным преимуществам изобретения относятся: возможность предупреждения рисков отклонения траектории и, следовательно, предотвращения столкновения, что также уменьшает необходимое время, затрачиваемое на реакцию членов экипажа при возникновении таких рисков; уменьшение количества ложных срабатываний сигнализации; повышение надежности предотвращения столкновений; возможность применения устройства для всех типов рельефа, зон воздушного пространства независимо от напряженности условий навигации; отсутствие необходимости использования наземных систем посадки.
Прочие преимущества и существенные признаки изобретения изложены в описании, иллюстрируемом чертежами, на которых представлено следующее:
фиг. 1 - пример применения устройства в соответствии с изобретением;
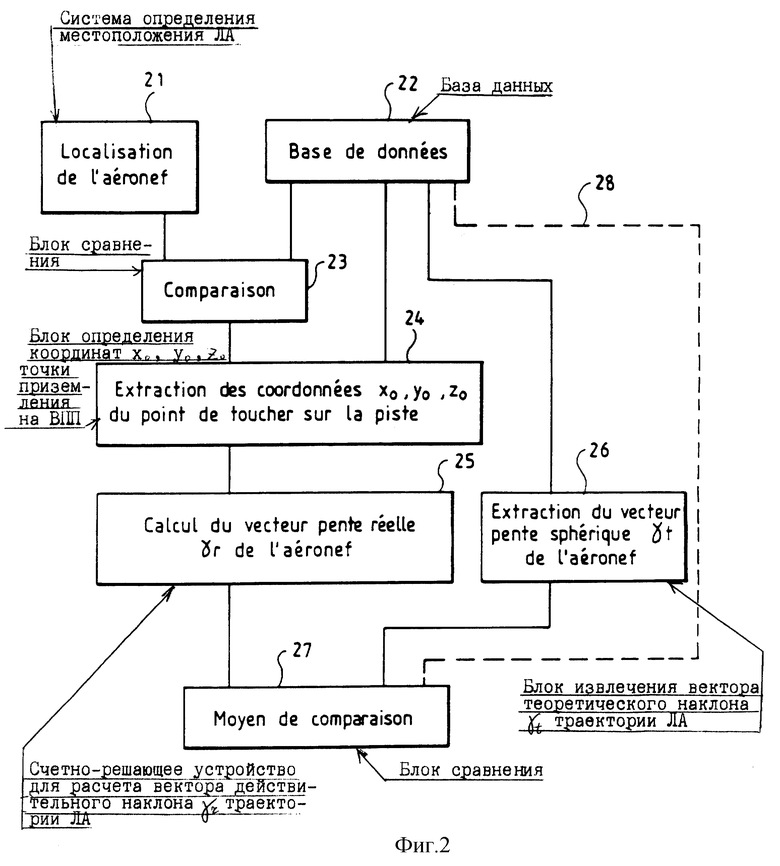
фиг. 2 - блок-схема устройства в соответствии с изобретением;
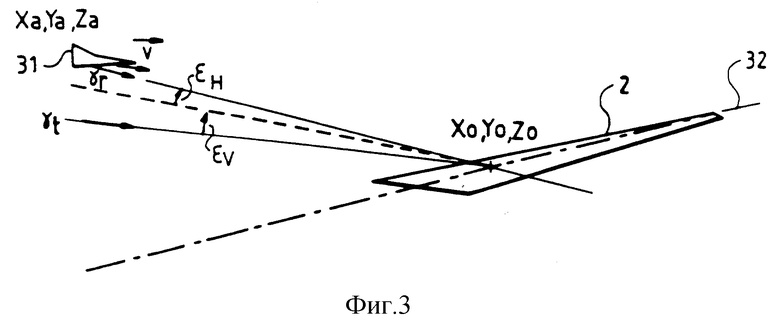
фиг. 3 - схематическое изображение стадии захода на посадку самолета;
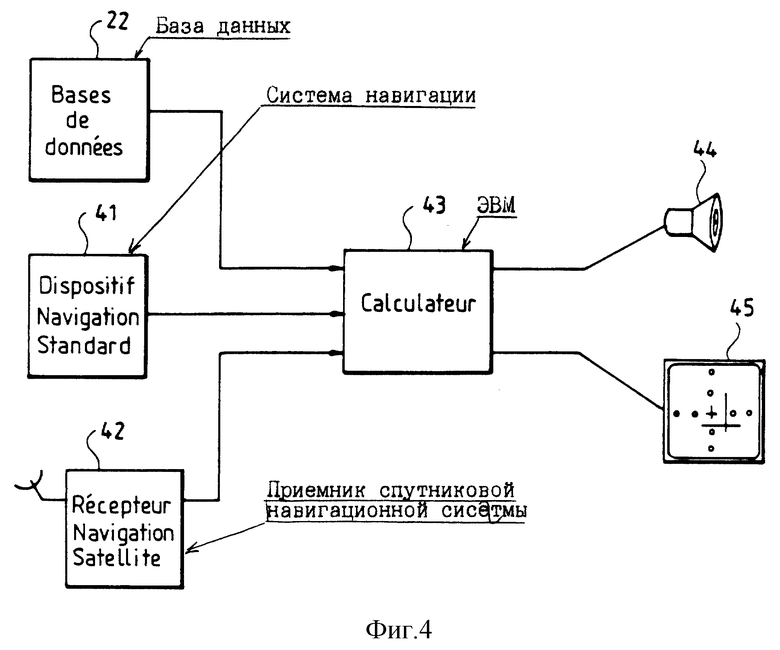
фиг. 4 - вариант реализации устройства в соответствии с изобретением.
Пример использования устройства в соответствии с изобретением, приведенный на фиг. 1, относится к посадке самолета в аэропорту 1. На фиг. 2 приведена блок-схема устройства в соответствии с изобретением, которое содержит бортовую систему 21 определения географического местоположения ЛА по трем осям связанной системы координат; базу данных 22, в частности, содержащую информационные данные относительно аэродромных полос и соответствующих процедур, например, для всех аэропортов мира либо только для аэропортов, которые могут иметь отношение к данному ЛА, а именно база данных содержит информацию, относящуюся к критической высоте полосы 2, курсовому направлению полосы и наклону траектории при заходе на посадку в соответствии с предусмотренными процедурами, причем база данных располагает такими данными для каждого из зарегистрированных аэропортов.
Периодически, например через заданные промежутки времени первые средства сравнения 23 сравнивают положение ЛА с информацией базы данных 22, подсоединенной к одному входу схемы сравнения 23, второй вход которой подсоединен к системе определения местоположения 21. В том случае, если по результатам сравнения устанавливается наличие аэропорта 1 в ближней зоне пространства при выполнении полета по заданному маршруту, например, записанному в памяти системы определения местоположения 21 или любом другом ЗУ, средство 24 определения координат xo, yo, zo точки приземления на взлетно-посадочной полосе выдает соответствующие координаты. При этом перед заходом на посадку устанавливается ожидаемая траектория 3 и определяется посадочный коридор 4 для обеспечения точного приземления самолета на полосу 2.
Стадия захода на посадку самолета 31 иллюстрируется фиг. 3 Система определения местоположения 21 позволяет определять пространственные координаты ха, уа, za самолета 31, характеризующегося вектором скорости V. Средство 24 определения координат xo, yo, zo точки приземления на полосе 2 выдает координаты, которые могут быть записаны в памяти базы данных 22. Для извлечения этих данных средство 24 подсоединено к базе данных 22. Средство 25 для расчета вектора действительного угла наклона  траектории самолета 31 соединено со средством 24 определения (извлечения) координат. Составляющие вектора действительного угла наклона
траектории самолета 31 соединено со средством 24 определения (извлечения) координат. Составляющие вектора действительного угла наклона  пропорциональны разностям значений координат соответственно ха - xo, уа - yo, za - zo.
пропорциональны разностям значений координат соответственно ха - xo, уа - yo, za - zo.
Средство 26 определения вектора теоретического угла наклона  траектории самолета соединено с базой данных 22. Это средство осуществляет поиск данных в базе данных 22, характеризующих вектор теоретического угла наклона
траектории самолета соединено с базой данных 22. Это средство осуществляет поиск данных в базе данных 22, характеризующих вектор теоретического угла наклона  зависимости от процедур посадки на выбранную полосу, зарегистрированных в базе данных. В примере, приведенном на фиг. 2, средство 26 определения теоретического угла наклона позволяет определять теоретический угол для посадочной полосы 2 летательного аппарата 31.
зависимости от процедур посадки на выбранную полосу, зарегистрированных в базе данных. В примере, приведенном на фиг. 2, средство 26 определения теоретического угла наклона позволяет определять теоретический угол для посадочной полосы 2 летательного аппарата 31.
Второе средство сравнения 27, соединенное со счетно-решающим средством 25 для расчета вектора действительного наклона  ЛА и со средством 26 определения вектора теоретического угла наклона
ЛА и со средством 26 определения вектора теоретического угла наклона  сравнивает два этих вектора
сравнивает два этих вектора  при этом вначале может быть произведен расчет горизонтального Σн и вертикального Σv рассогласований /отклонений/, после чего производится сравнение горизонтального рассогласования Σн с первым пороговым значением, с одной стороны, и сравнение вертикального рассогласования Σv со втором пороговым значением, с другой стороны. На выходе средства сравнения могут вырабатываться расчетные величины рассогласований Σн, Σv, подаваемые на систему визуализации /дисплей/, имеющуюся в распоряжении экипажа. При переходе, в частности, величины горизонтального рассогласования Σн через пороговое значение подается световой и/или звуковой сигнал для экипажа, причем этот сигнал может быть типа: "сближение". При переходе величины вертикального рассогласования через пороговое значение также подается световой или звуковой сигнал для экипажа, причем этот сигнал может быть типа: "земля". Первое и второе пороговые значения, с которыми сравнивают величины рассогласований Σн, Σv, могут представлять собой известные нормативные величины либо величины, зарегистрированные в базе данных 22. В последнем случае обязательным является подсоединение второго средства сравнения 27 к базе данных 22.
при этом вначале может быть произведен расчет горизонтального Σн и вертикального Σv рассогласований /отклонений/, после чего производится сравнение горизонтального рассогласования Σн с первым пороговым значением, с одной стороны, и сравнение вертикального рассогласования Σv со втором пороговым значением, с другой стороны. На выходе средства сравнения могут вырабатываться расчетные величины рассогласований Σн, Σv, подаваемые на систему визуализации /дисплей/, имеющуюся в распоряжении экипажа. При переходе, в частности, величины горизонтального рассогласования Σн через пороговое значение подается световой и/или звуковой сигнал для экипажа, причем этот сигнал может быть типа: "сближение". При переходе величины вертикального рассогласования через пороговое значение также подается световой или звуковой сигнал для экипажа, причем этот сигнал может быть типа: "земля". Первое и второе пороговые значения, с которыми сравнивают величины рассогласований Σн, Σv, могут представлять собой известные нормативные величины либо величины, зарегистрированные в базе данных 22. В последнем случае обязательным является подсоединение второго средства сравнения 27 к базе данных 22.
Для уменьшения риска ложных срабатываний системы сигнализации устройство, выполненное в соответствии с изобретением, может быть задействовано, например, по достижении некоторой заданной высоты снижения, выше которой могут альтернативно использоваться любые другие типы устройств для предотвращения столкновений.
Кроме блоков, приведенных на фиг. 2, устройство может содержать, например, блок сравнения курса ЛА с курсовыми направлениями 32 аэродромных полос. В том случае, если курсовое направление ни одной из полос, находящихся в ближайшей зоне пространства по отношению к ЛА, не совпадает с курсом ЛА, система предупределительной сигнализации вырабатывает световой и/или звуковой сигнал, таким образом указанный дополнительный блок позволяет осуществлять выбор посадочной полосы, после чего имеющиеся в устройстве средства определения устанавливают параметры и условия /процедуры/ посадки для данной посадочной полосы.
На фиг. 4 приведен вариант блок-схемы устройства, выполненного в соответствии с изобретением, в котором система определения местоположения 21 может представлять собой навигационную систему известного /стандартного/ типа 41 с приемником 42 спутниковой связи, предназначенным, главным образом, для повышения точности определения местоположения.
Первое средство сравнения 23, средство 24 определения координат точки приземления, счетно-решающее средство 25 для расчета вектора действительного наклона ЛА, средство 26 определения вектора теоретического наклона, второе средство сравнения 27 и средство сравнения курсов ЛА и посадочных полос могут, в частности, входить в состав ЭВМ, соединенной с базой данных 22, а также с системой навигации 41 известного типа и с приемником 42 спутниковой связи. ЭВМ 43 может быть присоединена к системе звуковой сигнализации 44 для подачи предупредительных сигналов, а также к системе визуализации /дисплею/ 45 для визуального воспроизведения по данным ЭВМ информации о наличии рассогласовании и команд, а также, в частности, сигнальных сообщений.
Устройство, выполненное в соответствии с изобретением, таким образом, обеспечивает с достаточной эффективностью и без существенного риска ложных срабатываний предупреждение столкновений на небольших высотах. Это, в частности, обеспечивает эффективность применения устройства при посадке на аэродромах с ограниченными наземными посадочными средствами, оно не требует наличия наземной станции для каждой ВПП, либо даже аэродромной наземной станции. В то же время наличие такой региональной или локальной наземной станции может существенно улучшить качествот
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ | 2009 |
|
RU2410753C1 |
Изобретение относится к устройствам предупреждения столкновений ЛА с землей. Устройство содержит систему определения местоположения ЛА, базу данных с информацией о ВПП, первое средство сравнения, средство определения координат точки приземления на ВПП, средства для расчета и определения векторов действительного и теоретического наклонов траектории ЛА соответственно и второе средство сравнения двух указанных векторов. Второе средство сравнения выдает расчетные значения вертикального и горизонтального рассогласований между указанными векторами и сравнивает полученные значения с пороговыми значениями. Изобретение обеспечивает предупреждение столкновений на небольших высотах при снижении риска ложных срабатываний. 5 з.п.ф-лы, 4 ил.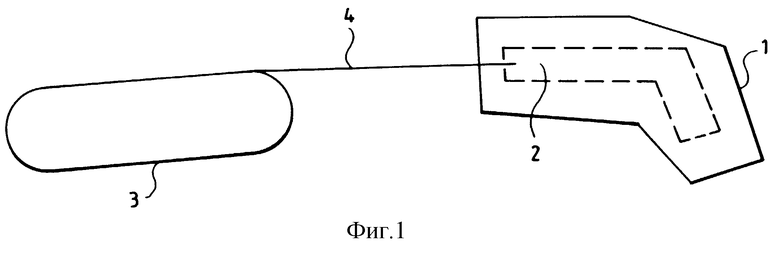
| US 3752967 А, 14.08.1973 | |||
| Устройство для сжатия сигнала по времени | 1975 |
|
SU565399A2 |
| US 3922637 А, 25.11.1975 | |||
| Устройство для контроля и сигнализации высоты полета самолета | 1990 |
|
SU1817125A1 |
