Изобретение относится к способам управления креном, курсом, тангажом и высотой полета легких летательных аппаратов, преимущественно мотодельтапланов.
Известен способ управления полетом дельтаплана, заключающийся в балансировании крыла дельтаплана телом пилота посредством трапеции, которая прикреплена к крылу растяжками (Кузьмин В. Альфа и омега дельтаплана. - Техника молодежи. 1975, N 6, с. 48).
Признаков, совпадающих с существенными признаками заявляемого изобретения нет.
Однако этот способ используется только для управления сверхлегкими моделями дельтапланов.
Известен способ управления дельтапланом с профильным удлиненным крылом и подвижной относительно паруса крыла килевой балкой. В этом способе для управления полетом также используют дебалансирующий момент, плечо которого создают перемещением веса тела пилота относительно центра воздушного давления на крыло с помощью трапеции. Подвесная система пилота в этом способе прикреплена к килевой балке по типу маятника. После начала выполнения крена под действием силы тяжести происходит соскальзывание килевой балки по поперечному лонжерону на величину слабины троса натяжения паруса крыла. Это изменяет условия обтекания воздухом левой и правой половин крыла и дельтаплан изменяет курс полета (Ордоди М. Дельтапланеризм. М.: Машиностроение, 1984, с. 46-49).
Признаком, совпадающим с существенными признаками заявляемого изобретения является:
дебалансирующий момент, плечо которого создают перемещением присоединенной массы (тела пилота) относительно центра воздушного давления.
Однако управление по этому способу более тяжелым летательным аппаратом - мотодельтапланом, который имеет двигатель, мотораму, шасси и кресло пилота, затруднено. Пилоту приходится прилагать значительные усилия для дисбаланса крыла, смещая всю присоединенную к несущему крылу массу относительно центра воздушного давления, что, учитывая особенности подвеса к килевой балке, эквивалентно приподниманию присоединенной массы относительно точки подвеса (маятниковый подвес). В то же время соскальзывание килевой балки в килевом кармане в сторону крена происходит не сразу, а по истечении некоторого времени, необходимого для того, чтобы величина проекции веса килевой балки на направление крена оказалась достаточной для преодоления силы трения между килевой балкой и конструкцией килевого кармана, а также аэродинамического сопротивления боковой плоскости килевой балки. Т.е. имеет место гистерезис между началом управления и его результатом - аппарат вяло начинает маневр, а затем достаточно резко входит в него. Характерным также является увеличенный мидель аппарата, необходимый для реализации маятникового подвеса, что обуславливает и увеличение лобового аэродинамического сопротивления аппарата.
Задачей изобретения является усовершенствование способа управления летательным аппаратом за счет перемещения присоединенной массы относительно центра воздушного давления без изменения потенциальной энергии присоединенной массы при одновременном активном изменении условий обтекания левой и правой половин крыла летательного аппарата.
Техническим результатом заявляемого изобретения является уменьшение усилия управления летательным аппаратом, преимущественно мотодельтапланом, сокращение времени его реакции на управляющее действие пилота и обеспечение плавности маневра, а также уменьшение лобового сопротивления аппарата.
Указанный технический результат достигается тем, что в способе управления летательным аппаратом, содержащем дебалансирование крыла за счет момента, плечо которого создают перемещением веса присоединенной массы относительно центра воздушного давления на крыло в сторону необходимого крена или тангажа, перемещение точки подвеса присоединенной массы относительно центра воздушного давления крыла осуществляют параллельно его плоскости. Причем для выполнения крена, одновременно с этим, перемещают килевую балку.
Предложенный способ управления полетом реализован на мотодельтаплане. При этом, осуществляя изменение тангажа, точку подвеса присоединенной массы перемещают вдоль килевой балки, сохраняя последнюю неподвижной в плоскости крыла. Осуществляя изменение крена, точку подвеса присоединенной массы перемещают вместе с килевой балкой в плоскости крыла, например, вдоль поперечного лонжерона, не перемещая вдоль килевой балки. Эти перемещения осуществляют с помощью командного рычага управления, приводимого в действие пилотом. Для одновременного изменения курса и высоты полета точку подвеса перемещают одновременно вдоль килевой балки и вместе с ней. В отличие от существующего способа управления при изменении крена или тангажа перемещение точки подвеса присоединенной массы осуществляется без приподнятия этой массы, т.е. пилоту для начала маневра требуется преодолевать только силу трения в приспособлении для подвески присоединенной массы к килевой балке и поперечному лонжерону. Таким образом, возможно достижение большей амплитуды и скорости осуществления маневра при снижении усилия управления. Одновременно, используя принудительное, а не под действием собственного веса, перемещение килевой балки, осуществляется активное изменение условий обтекания левой и правой половин крыла, что снижает время реакции летательного аппарата на управляющее воздействие пилота, исключает гистерезис управляющего воздействия, при этом маневр от начала до конца остается полностью под контролем пилота.
Уменьшение лобового сопротивления аппарата достигается за счет уменьшения миделя аппарата, так, при реализации предлагаемого способа из конструкции исключается маятниковый подвес присоединенной массы.
На чертеже показана схема осуществления способа. В осуществлении способа участвуют килевая балка 1, реализующая перемещение в плоскости крыла (показано стрелками А), к которой подвешена присоединенная масса 2 с возможностью перемещения вдоль килевой балки в опорах 3 (показано стрелками Б), поперечный лонжерон 4, вдоль которого в опорах 5 перемещается килевая балка 1. Парус 6 крыла соединяет килевую балку 1 с передней кромкой 7 крыла. На присоединенную массу действует сила тяжести Р. На крыло в центре воздушного давления действует сила C. Когда аппарат находится в горизонтальном полете, силы P и C находятся на одной линии и взаимно уравновешивают друг друга.
Например, необходимо выполнить маневр вправо. Для маневра вправо осуществляем перемещение центра присоединенной массы вправо относительно центра воздушного давления, для чего перемещаем в плоскости крыла килевую балку 1 относительно поперечного лонжерона 4. Правая половина паруса 6 крыла "вспухает", а левая половина натягивается. Возникающая разница в условии обтекания левой и правой половин паруса 6 крыла дополняет действие момента, образованного силами веса P и воздушного давления C, аппарат выполняет крен вправо и совершает поворот вправо. Действие всех факторов управления полетом аппарата осуществляется одновременно, а не последовательно. В результате этого возбуждение аппарата требует меньшего времени и усилия, т.к. перемещение центра тяжести присоединенной массы происходит без его приподнятия, а основное усилие тратится на преодоление силы трения в опоре 5.
Для изменения тангажа летательного аппарата осуществляем перемещение центра присоединенной массы вдоль килевой балки 1. Возникает момент сил P и C, и аппарат наклоняется в вертикальной плоскости. Т.к. килевая балка 1 остается неподвижной, то аппарат сохраняет свое курсовое положение неизменным. Обратное перемещение центра присоединенной массы приводит к возврату аппарата в исходное положение. Как и в предыдущем примере, для осуществления управления пилоту требуется преодолеть только силу трения в опоре 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЫЛО МНОГОФУНКЦИОНАЛЬНОГО СВЕРХЛЕГКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208541C1 |
| Система для балансирного управления летательным аппаратом | 2019 |
|
RU2728219C1 |
| Дельтаплан | 1987 |
|
SU1752657A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2010 |
|
RU2461493C2 |
| Дельтаплан с балансирным управлением | 1984 |
|
SU1200530A1 |
| Дельтаплан | 1982 |
|
SU1121181A1 |
| Система гиростабилизации кабины пилотируемого летательного аппарата (ЛА) | 2019 |
|
RU2728221C1 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2148528C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
Изобретение относится к авиации и касается технологии управления креном, курсом, тангажом и высотой полета легких летательных аппаратов, преимущественно мотодельтапланов. Способ управления летательным аппаратом включает в себя дебалансирование крыла с помощью момента, плечо которого создают перемещением веса присоединенной массы относительно центра воздушного давления на крыло в сторону необходимого крена или тангажа. Дебалансирование крыла осуществляют перемещением точки подвеса присоединенной массы параллельно плоскости крыла. Для управления креном одновременно в плоскости крыла могут перемещать килевую балку. Технический результат реализации изобретения заключается в уменьшении усилия управления летательным аппаратом, преимущественно мотодельтапланом, в сокращении времени его реакции на управляющее действие пилота и в обеспечении плавности маневра, а также в уменьшении лобового сопротивления аппарата. 1 з.п.ф-лы. 1 ил.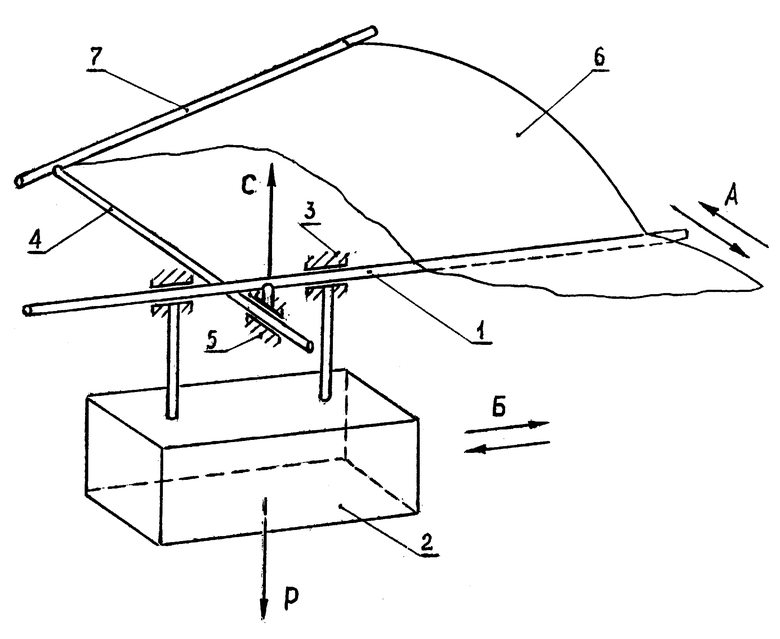
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ордоди М | |||
| Дельтапланеризм | |||
| - М.: Машиностроение, 1984, с.46-49 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| НАНОСТРУКТУРИРОВАННОЕ ОСНОВАНИЕ СИЛДЕНАФИЛА, ЕГО ФАРМАЦЕВТИЧЕСКИ ПРИЕМЛЕМЫЕ СОЛИ И СО-КРИСТАЛЛЫ, ИХ КОМПОЗИЦИИ, СПОСОБ ИХ ПОЛУЧЕНИЯ И СОДЕРЖАЩИЕ ИХ ФАРМАЦЕВТИЧЕСКИЕ КОМПОЗИЦИИ | 2010 |
|
RU2545784C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| АВТОНОМНАЯ ТЕПЛОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ДВИГАТЕЛЕМ СТИРЛИНГА | 1999 |
|
RU2164614C1 |
