Изобретение относится к измерительной технике и может быть использовано для измерений мелкомасштабной структуры океанологических полей и разрезов.
Известно устройство для проведения непрерывных измерений океанологических характеристик вдоль траекторий вертикального или наклонного зондирования или горизонтальной буксировки, содержащее регистрирующую аппаратуру и зонд, опускаемый с борта судна-буксировщика на кабель-тросе.
Недостатком этого устройства является низкое разрешение структуры исследуемого поля в направлении по нормали к перемещению измерительного зонда. В данном случае это близко к направлению горизонтальной оси плоскости разреза.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому техническому решению является многогоризонтное буксируемое устройство, работающее в режиме без сканирования и содержащее зонды, закрепленные на кабель-тросе, груз-углубитель и регистрирующую аппаратуру, установленную на судне- буксировщике.
Недостатком этого устройства также является низкое разрешение по нормали к направлению перемещения, что в данном случае соответствует направлению вертикальной оси плоскости разреза. Чем большее количество информации необходимо получить, тем больше количество зондов надо иметь в составе комплекса. Это приводит к утяжелению и удорожанию всей конструкции и, кроме того, величина интервала между смежными горизонтами ограничивается размерами зондов.
Из сказанного следует, что информативность этого устройства ограничена и не может быть увеличена без конструктивного изменения всего устройства.
Цель изобретения - повышение информативности многогоризонтных буксируемых устройств.
Поставленная цель достигается тем, что устройство для океанологических исследований, содержащее кабель-трос, длиной 7, подсоединенный одним концом к лебедке с
(Л
С
о со кэ
реверсивным приводом, а другим связанный с грузом, гирлянду зондов, равномерно распределенных вдоль кабель-троса с шагом ДI, по меньшей мере, один датчик давления, размещенный в соответствующем зонде, и регистрирующую аппаратуру, снабжено последовательно соединенными преобразователем давления в глубину погружения зонда, схемой сравнения с эталонным значением, триггером и блоком управления, а также переключателем реверса, подключенным ко второму входу триггера, при этом вход преобразователя давления в глубину погружения зонда подключен к выходу датчика давления, блок управления подключен к приводу лебедки, а кабель-трос выполнен с обтекателем, длина lo которого определяется из выражения:
10 -1т- AI
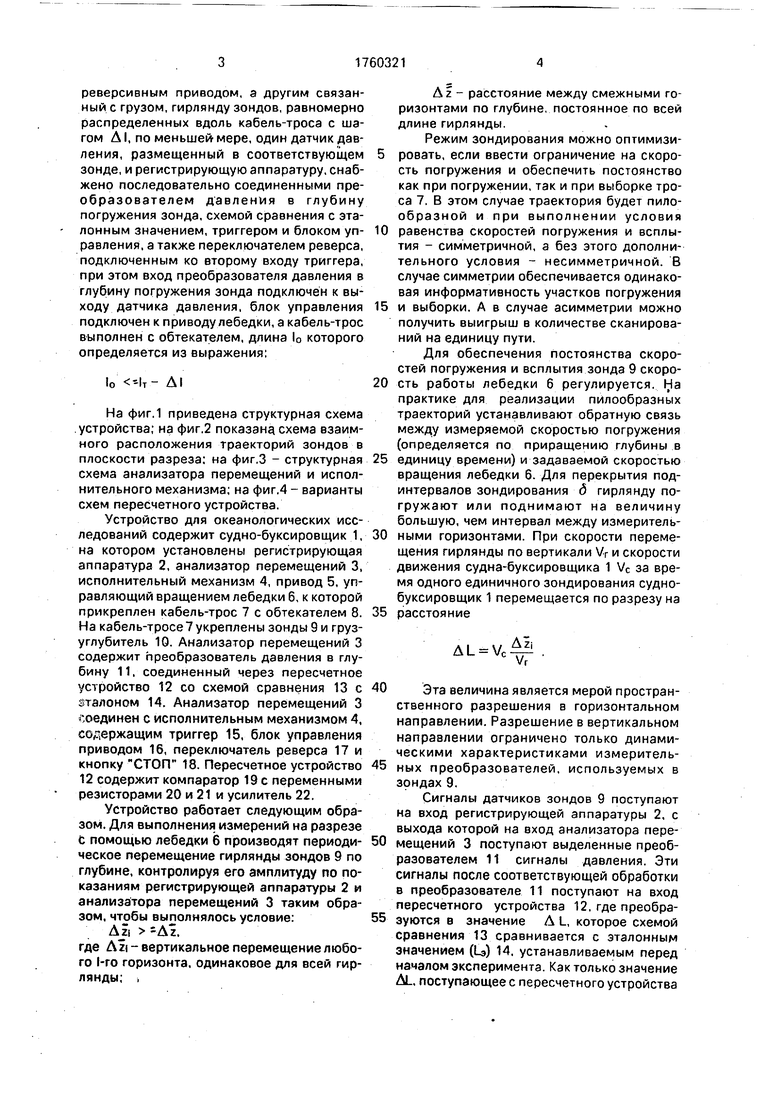
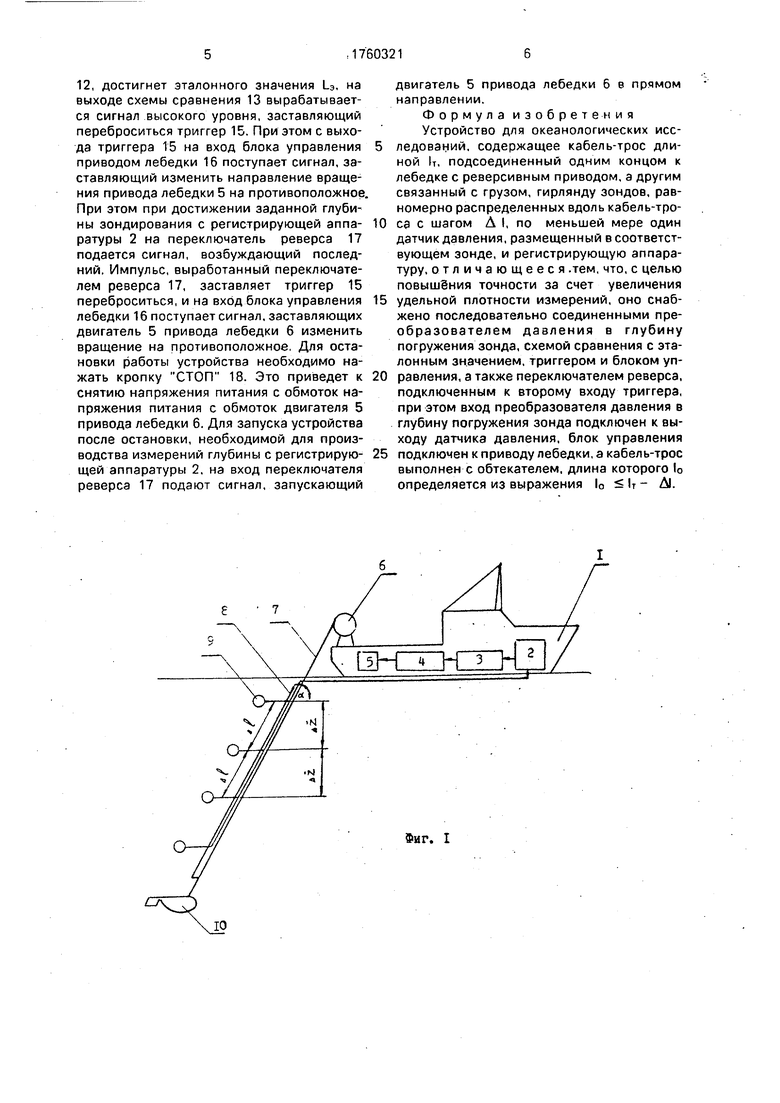
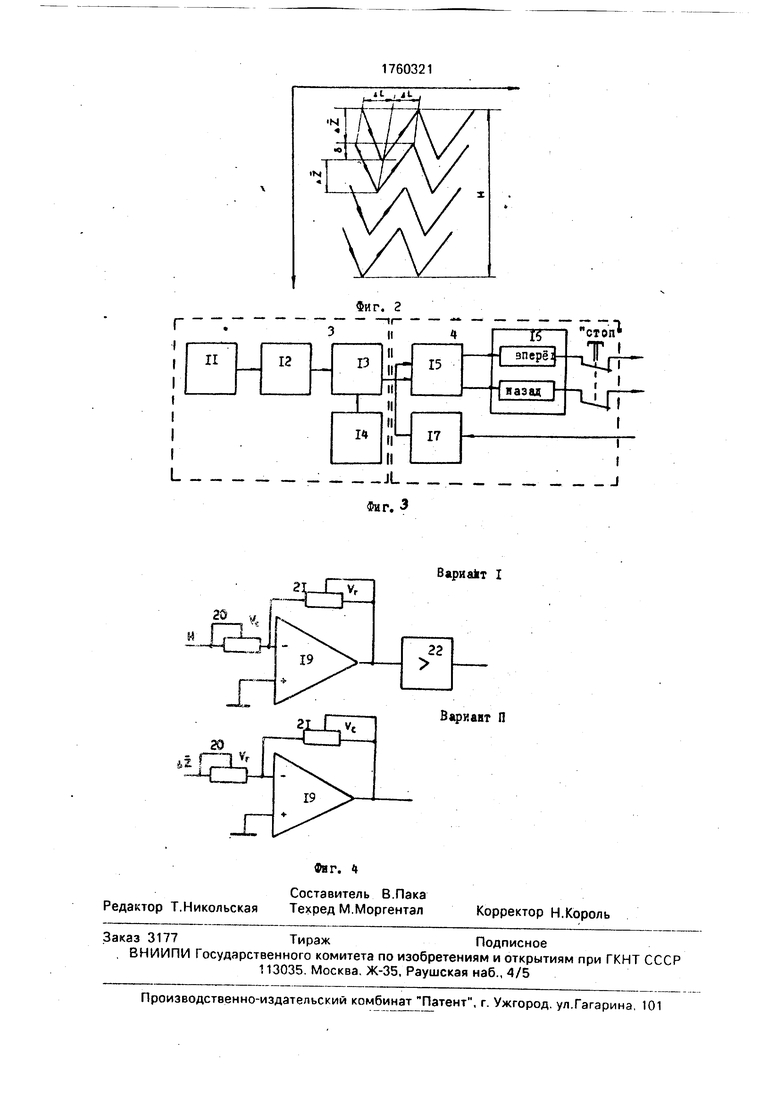
На фиг.1 приведена структурная схема устройства; на фиг,2 показана, схема взаимного расположения траекторий зондов в плоскости разреза: на фиг.З - структурная схема анализатора перемещений и исполнительного механизма; на фиг.4 - варианты схем пересчетного устройства.
Устройство для океанологических исследований содержит судно-буксировщик 1, на котором установлены регистрирующая аппаратура 2, анализатор перемещений 3, исполнительный механизм 4, привод 5, управляющий вращением лебедки 6, к которой прикреплен кабель-трос 7 с обтекателем 8. На кабель-тросе 7 укреплены зонды 9 и груз- углубитель 10. Анализатор перемещений 3 содержит преобразователь давления в глубину 11, соединенный через пересчетное устройство 12 со схемой сравнения 13 с эталоном 14. Анализатор перемещений 3 соединен с исполнительным механизмом 4, содержащим триггер 15, блок управления приводом 16, переключатель реверса 17 и кнопку СТОП 18. Пересчетное устройство 12 содержит компаратор 19 с переменными резисторами 20 и 21 и усилитель 22.
Устройство работает следующим образом. Для выполнения измерений на разрезе С помощью лебедки 6 производят периодическое перемещение гирлянды зондов 9 по глубине, контролируя его амплитуду по показаниям регистрирующей аппаратуры 2 и анализатора перемещений 3 таким образом, чтобы выполнялось условие:
Azi sAz.
где A zi - вертикальное перемещение любого 1-го горизонта, одинаковое для всей гирлянды; ,
Д z - расстояние между смежными горизонтами по глубине, постоянное по всей длине гирлянды.
Режим зондирования можно оптимизировать, если ввести ограничение на скорость погружения и обеспечить постоянство как при погружении, так и при выборке троса 7. В этом случае траектория будет пилообразной и при выполнении условия
равенства скоростей погружения и всплытия - симметричной, а без этого дополнительного условия - несимметричной. В случае симметрии обеспечивается одинаковая информативность участков погружения
и выборки. А в случае асимметрии можно получить выигрыш в количестве сканирований на единицу пути.
Для обеспечения постоянства скоростей погружения и всплытия зонда 9 скорость работы лебедки 6 регулируется. На практике для реализации пилообразных траекторий устанавливают обратную связь между измеряемой скоростью погружения (определяется по приращению глубины в
единицу времени) и задаваемой скоростью вращения лебедки 6. Для перекрытия под- интервалов зондирования д гирлянду погружают или поднимают на величину большую, чем интервал между измерительными горизонтами. При скорости перемещения гирлянды по вертикали Vr и скорости движения судна-буксировщика 1 Vc за время одного единичного зондирования судно- буксировщик 1 перемещается по разрезу на
расстояние
AL VcAЈi.
Vr
Эта величина является мерой пространственного разрешения в горизонтальном направлении. Разрешение в вертикальном направлении ограничено только динамическими характеристиками измерительных преобразователей, используемых в зондах 9.
Сигналы датчиков зондов 9 поступают на вход регистрирующей аппаратуры 2, с выхода которой на вход анализатора перемещений 3 поступают выделенные преобразователем 11 сигналы давления. Эти сигналы после соответствующей обработки в преобразователе 11 поступают на вход пересчетного устройства 12, где преобразуются в значение A L, которое схемой сравнения 13 сравнивается с эталонным значением (Ц) 14. устанавливаемым перед началом эксперимента. Как только значение AL, поступающее с пересчетного устройства
12, достигнет эталонного значения , на выходе схемы сравнения 13 вырабатывается сигнал высокого уровня, заставляющий переброситься триггер 15. При этом с выхода триггера 15 на вход блока управления приводом лебедки 16 поступает сигнал, заставляющий изменить направление вращения привода лебедки 5 на противоположное При этом при достижении заданной глубины зондирования с регистрирующей аппа- ратуры 2 на переключатель реверса 17 подается сигнал, возбуждающий последний. Импульс, выработанный переключателем реверса 17, заставляет триггер 15 переброситься, и на вход блока управления лебедки 16 поступает сигнал, заставляющих двигатель 5 привода лебедки б изменить вращение на противоположное, Для остановки работы устройства необходимо нажать кропку СТОП 18. Это приведет к снятию напряжения питания с обмоток напряжения питания с обмоток двигателя 5 привода лебедки 6. Для запуска устройства после остановки, необходимой для производства измерений глубины с регистрирую- щей аппаратуры 2, на вход переключателя реверса 17 подают сигнал, запускающий
двигатель 5 привода лебедки 6 е прямом направлении.
Формула изобретения Устройство для океанологических исследований, содержащее кабель-трос длиной U, подсоединенный одним концом к лебедке с реверсивным приводом, а другим связанный с грузом, гирлянду зондов, равномерно распределенных вдоль кабель-троса с шагом А I, по меньшей мере один датчик давления, размещенный в соответствующем зонде, и регистрирующую аппаратуру, отличающееся .тем, что, с целью повышения точности за счет увеличения удельной плотности измерений, оно снабжено последовательно соединенными преобразователем давления в глубину погружения зонда, схемой сравнения с эталонным значением, триггером и блоком управления, а также переключателем реверса, подключенным к второму входу триггера, при этом вход преобразователя давления в глубину погружения зонда подключен к выходу датчика давления, блок управления подключен к приводу лебедки, а кабель-трос выполнен с обтекателем, длина которого 1о определяется из выражения 0 т - Д1.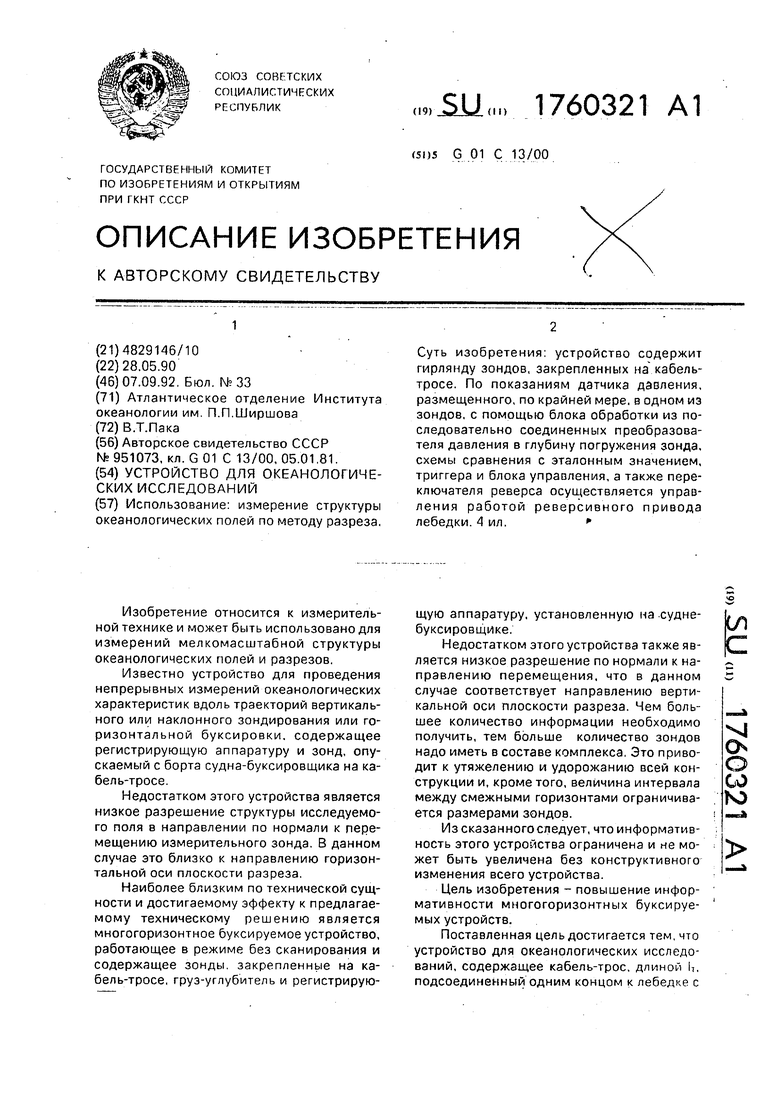
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ НА ХОДУ СУДНА (ВАРИАНТЫ) | 2017 |
|
RU2669251C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Способ измерения вертикальных распределений элементов морской воды на океанологических разрезах | 1983 |
|
SU1191735A1 |
| СПОСОБ ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ | 2009 |
|
RU2404081C1 |
Использование: измерение структуры океанологических полей по методу разреза. Суть изобретения: устройство содержит гирлянду зондов, закрепленных на кабель- тросе. По показаниям датчика давления, размещенного, по крайней мере, в одном из зондов, с помощью блока обработки из последовательно соединенных преобразователя давления в глубину погружения зонда, схемы сравнения с эталонным значением, триггера и блока управления, а также переключателя реверса осуществляется управления работой реверсивного привода лебедки. 4 ил.
8 7
Гвн
,fc
-S J fl/
Фиг. I
г
ll , Ji.
Фиг. 2
15
зперё
стоп
Э--1ИIIII JL
Фиг. 3
Вариант I
Вариант П
| Устройство для измерения параметров морской среды | 1981 |
|
SU951073A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
