него действия и двумя двуплечими рычагами, первый из которых шарнирно присоединен к подвижным элементам упомянутых гидравлического распределителя и исполнительного гидроцилиндра задних управляемых колес, а второй - к оси первого двуплечего рычага н к продольной тяге между упомянутыми упорами, причем другой конец тяги кинематически связан с подвижным элементом исполнительного гидроцнлнндра передних управляемых колес, а упомянутая пружина двустороннего действия кинематически связана со вторым плечом первого двуплечего рычага, а также тем, что упомянутые упоры продольной тяги выполнены регулируемыми по длине последней.
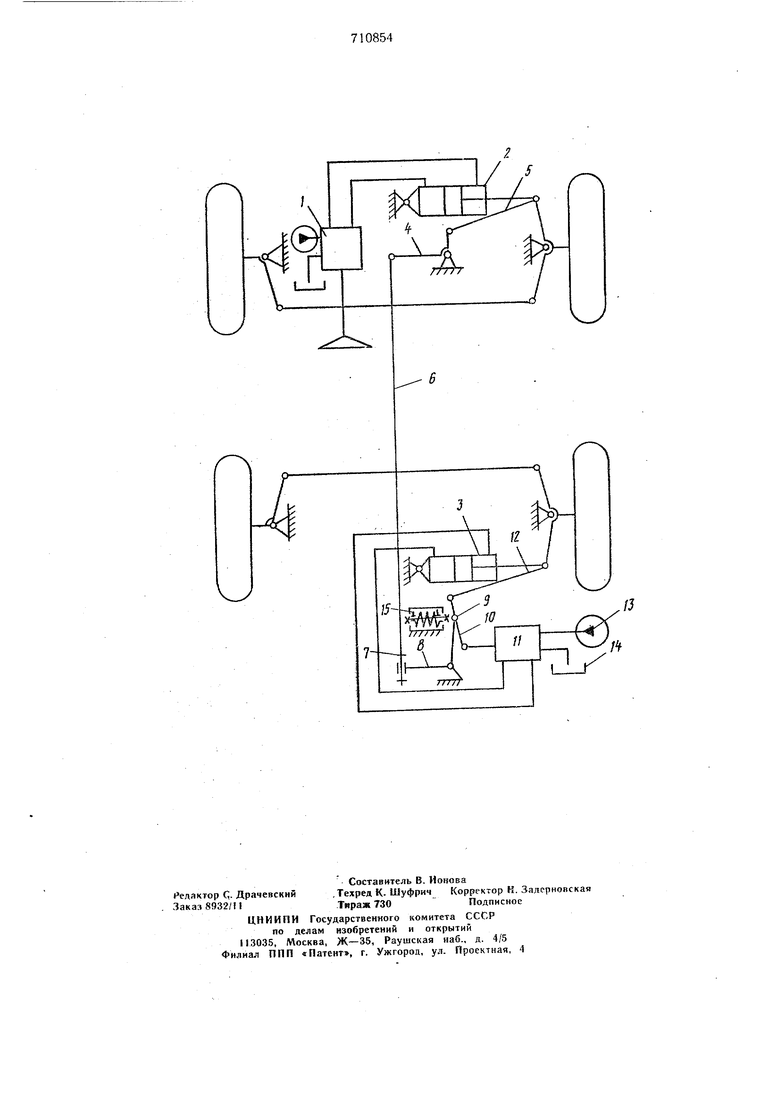
На чертеже изображена схема рулевого управления транспортного средства со всеми управляемыми колесами.
Рулевое управление транспортного средства состоит нз рулевого механизма t, исполнительного гидроцилиндра 2 передних управляемых колес, исполнительного гндроцилиндра 3 задних управляемых колес, рычага 4, связанного тягой 5 с гидроцилиндром
2и продольной тягой 6, с закрепленными на ней подвижными упорами 7, причем тяга б подвижно соединена с двуплечим рычагом 8, кинематически связанным посредством оси 9 с другим двуплечим рычагом 10, соединен ным одним концом с золотником распределителя 11, другим - с тягой 12 обратной связи, прикрепленной к штоку гидроцилиндра 3, насоса 13, бака 14 и пружины 15 двустороннего действия, которая удерживает рычаг 10 в положении, соответствующем пря лолинейному движению задних управляемых 1колес.
Рулевое управление работает следующим образом.
При отсутствии поворота передних управляемых колес или повороте передних управляемых колес в пределах свободного хода продольной тяги б относительно рычага 8 задние управляемые колеса удерживаются в нейтральнбм положении посредством пружины двустороннего действия 15.
При произвольном отклонении задних колес OS нейтрального положения перемещается щток гндроцилиндра 3 с тягой 12 обратной связи, которая поворачивает рычаг 10 вокруг оси 9, выводя золотник распределителя 11 из нейтрального по юження
Золотник распределителя 11 открывая соответ(твующий канал, пропускает рабочую жиДкос ь в одну из полостей гидроцилиндра
3для возврата колес в нейтральное положение. . .
Свободный поворот передних колес без. поворота задних в заданных пределах происходит за счет свободного хода продольной тяги 6 относительно рычага 8. При дальнейшем повороте передних колес один из упоров 7 продолкной тяги U
упирается в рычаг 8, который, поворачиваясь, перемещает ось 9, вызывая поворот рычага 10 вокруг щарнирной осн на тяге 12. Рычаг 10 выводит из равновесия золотник распределителя 11 и рабочая жидкость, . проходя через открывшийся канал распределителя II, поступает в гидроцилиндр 3, который поворачивает задние управляемые колеса. Перемещаясь, шток гидроцилиндра 3 одновременно перемещает тягу 12, поворачивая рычаг IО вокруг оси 9, возвращая золотник ра ;пределителя 11 в среднее гю.ложение. При возврате передних колес в нейтральное положение пружина двустороннего действия 15 перемещает ось 9 и рычаг 8 в нейтральное положение. При этом задние колеса занимают среднее положение.
Формула изобретения
1.Рулевое управление транспортного 0 средства со всеми управляемыми колесами,
содержащее насос, бак, привод управления передними колесами, включающий рулевой механизм, кинематически связанный с рулевым колесом и гидравлически соединенный с насосом, баком и исполнительным гидроцилиндром передних управляемых колес, кинематически связанным с последними, и привод управления задними колесами, включающий гидравлический распределитель, соединенный с насосом, баком и исполнительO ным гидроцилиндром задних управляемых колес, кинематически связанным с последними, отличающееся тем, что, с целью уменьшения непроизводительных затрат мощности насоса, оно снабжено продольной тягой с двумя упорами, пружиной двустороннего действия и двумя двуплечими рычагами, первый из которых .шарнирно присоединен к подвижным элементам упомянутых гидравлического распределителя и исполкительноного гидроцилиндра задних управляемых
0 колес, а второй - к оси первого двуплечего рычага и к продольной тяге между упомянутыми упорами, причем другой конец тяги кинематически связан с подвижным элементом исполнительного гидроцилиндра пе-. редних управляемых колес, а упомянутая
пружина двухстороннего действия кинемати. чески связана со вторым плечо.м первого двуплечего рычага.
,2. Рулевое управление по п. 1, отличающееся тем, что, с целью регулирования ве- личины запаздывания поворота задних управляемых колес относительно передних, упоры продольной тяги выполнены регулируемыми по длине последней.
Источники ииформацин, принятые во пнимание при экспертизе
1. Авторское свилетельство СССР :№ 499166, кл. В 62 D , 1972.
2.Авторское свидетельство СССР № 350688. кл. В 62 D 5/00. 1970
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1985 |
|
SU1298124A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА С ПЕРЕДНИМИ И ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2160205C2 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
| СПОСОБ ДИСТАНЦИОННОГО ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ И ДИСТАНЦИОННОЕ РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2012 |
|
RU2488508C1 |
| Устройство для управления колесами полу-пРицЕпНОй СЕльСКОХОзяйСТВЕННОй МАшиНы | 1979 |
|
SU821276A1 |
| Система управления бесступенчатым механизмом поворота транспортного средства | 1987 |
|
SU1474014A1 |
| Гидравлическая система рулевого управления | 1979 |
|
SU787240A1 |
| Гидравлическая система рулевого управления шарнирно-сочлененного транспортного средства | 1978 |
|
SU765082A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |