Изобретение относится к летательным аппаратам вертикального взлета.
Известны вертолеты, содержащие фюзеляж, двигатели, кабину экипажа, лопасти несущего винта. /Далин В.Н. Конструкция вертолетов. М.: Машиностроение, 1940, стр. 7-9, 56/.
Недостатком известного вертолета является то, что крепление лопастей несущего винта осуществляется только к валу двигателя, что при полете создает большой изгибающий момент, действующий на лопасти, и большой крутящий момент, действующий на вал двигателя. Этим ограничивается вес вертолета.
Предлагаемое изобретение направлено на создание вертолета большой грузоподъемности, улучшение его конструктивной схемы, улучшение его механических и аэродинамических свойств.
Поставленная задача решается тем, что вертолет содержит первый круговой обод, подвижно закрепленный на фюзеляже посредством шарниров, валов и узлов продольной и поперечной подвески, предназначенных для поворота первого кругового обода с целью движения вертолета, содержащий круговой паз с закрепленными в нем катками, расположенный в пазу и входящий с первым круговым ободом в зацепление и взаимодействие второй круговой обод с шарнирно закрепленными в нем лопастями несущего винта и закрепленной зубчатой круговой дорожкой.
На первом круговом ободе по периметру закреплены двигатели, зубчатые шестерни которых входят в зубчатое зацепление с зубчатой круговой дорожкой.
Также на первом круговом ободе закреплены направляющие, в которых подвижно расположен третий круговой обод, соединенный с задвижками подачи топливной смеси в двигателях и механизмом движения третьего кругового обода.
С двигателями, расположенными на поперечной оси вертолета, механически соединены винты управления и горизонтальной тяги с возможностью управления полетом, в том числе и получение крена вертолета при разворотах путем поворотов валов вышеуказанных винтов в вертикальной плоскости под углом "вверх" или "вниз" к направлению полета.
С двигателями, расположенными на поперечной оси вертолета, и с валами винтов управления и горизонтальной тяги соединены механизмы поворота и скоростей вращения валов винтов управления и горизонтальной тяги.
Для изменения шага лопастей несущего винта вертолета, первый круговой обод содержит первую дугу и вторую дугу, механизм движения первой и второй дуг соединенный с ними, а также четвертый круговой обод, подвижно закрепленный в круговом пазу второго кругового обода, механически соединенный с лопастями несущего винта и соединенный с механизмом движения четвертого кругового обода.
Вертолет содержит механизм наклона первого кругового обода, механически соединенный с фюзеляжем и первым круговым ободом и одним из двигателей, расположенных на продольной оси вертолета, и соединенный с устройством управления механизмом наклона первого кругового обода.
Кабина экипажа расположена в носовой части первого кругового обода, а нижняя часть фюзеляжа снабжена круговой посадочной платформой. По периметру первого кругового обода с ним соединены поплавки.
Изобретение поясняется фиг. 1 и 2.
Вертолет состоит из кабины экипажа 1, фюзеляжа 2, вдоль поперечной оси которого расположены поперечные подвески 3. На концах валов 4 с помощью шарниров 5 и 6 закреплен первый круговой обод 7. На первом круговом ободе 7, посредством катков 8, закрепленных в его пазу, входит в зацепление и взаимодействует с ним второй круговой обод 9, с шарнирно закрепленными в нем лопастями 10 несущего винта. Кроме того, на первом круговом ободе 7 по его периметру закреплены двигатели 11, зубчатые шестерни 12 которого входят в зубчатое зацепление с зубчатой круговой дорожкой 13, закрепленной на втором круговом ободе 9. На первом круговом ободе 7 закреплены направляющие 14, в которых подвижно расположен третий круговой обод 15, соединенный с задвижками подачи топливной смеси 16 в двигателях 11 и механизмом движения 17 третьего кругового обода 15. С двигателями 11, расположенными на поперечной оси вертолета, механически соединены винты управления и горизонтальной тяги 18 с их валами 19, с которыми соединены механизмы поворота и скоростей вращения валов 20, а также устройства управления механизмами поворота и скоростей вращения валов 21 винтов управления и горизонтальной тяги 18.
Первый круговой обод 7 содержит первую дугу 22 и вторую дугу 23, механизм движения первой и второй дуг 24, соединенный с ним второй круговой обод 9. Четвертый круговой обод 25 подвижно закреплен в круговом пазу второго кругового обода 9 и механически соединен с лопастями 10 и соединен с механизмом движения 26 четвертого кругового обода 25, содержащим шестеренки 27 и 28.
Механизм наклона первого кругового обода 7, состоящий из зубчатой шестерни 29, соединенной с двигателем 11, расположенным на продольной оси вертолета, и зубчатой дуги 30, входящей в зубчатое зацепление с зубчатой шестерней 29 и закрепленной на фюзеляже 2 посредством стоек 31, соединен ними с устройством управления 32 механизмом наклона первого кругового обода.
Вдоль продольной оси вертолета крепятся продольные узлы подвески, состоящие из шарниров 33 и 34, расположенных на фюзеляже 2 и первом круговом ободе 7. В шарнирах 33 вращаются направляющие 35, в шарнирах 34 полозья 36. К нижней части фюзеляжа 2 закреплена круговая посадочная платформа 37. По периметру с ободом 7 соединены поплавки 38.
Работа вертолета осуществляется следующим образом. После запуска двигателей 11, путем зацепления зубчатых шестерен 12 с зубчатой круговой дорожкой 13, закрепленной на втором круговом ободе 9, тот приходит в круговое движение и вращение лопастей 10. Тяга лопастей 10 через второй круговой обод 9, катки 8, первый круговой обод 7, валы 4, шарниры 5 и 6, узлы продольной и поперечной подвесок передается фюзеляжу 2. Вертолет поднимается в воздух. Для движения вперед из кабины экипажа 1 подается команда на наклон первого кругового обода 7. Команда поступает на устройство управления 32 механизмом наклона первого кругового обода 7. Зубчатая шестерня 29, соединенная с двигателем 11, приводится во вращение и, двигаясь по зубчатой дуге 30, жестко закрепленной на фюзеляже 2 стойками 31, наклоняет первый круговой обод 7 относительно фюзеляжа 2 посредством вращения валов 4 в шарнирах 5 и 6. При этом полость вращения несущего винта вертолета наклоняется и горизонтальная составляющая тяга несущего винта устремляет вертолет вперед. Для увеличения скорости вращения лопастей 10 пилот из кабины экипажа 1 подает команду на механизм движения 17 третьего кругового обода 15, который приводит в движение задвижки подачи топливной смеси 16 в двигателях 11. Кроме того, для изменения шага лопастей 10 и изменения тяги несущего винта пилот из кабины экипажа 1 подает команду на механизм движения первой и второй круговых дуг 24. Дуга 22 или дуга 23 выдвигается вперед и входит в зацепление с шестеренкой 27 или 28 механизма движения 26 четвертого кругового обода 25. Четвертый круговой обод 25 приходит в движение и приводит во вращение лопасти 10, тем самым изменяя их шаг.
Для управления полетом /развороты влево, вправо, вращения вокруг вертикальной оси, получения кренов при разворотах/ и получения дополнительной горизонтальной тяги предназначены винты управления и горизонтальной тяги 18. При развороте влево команда пилота из кабины экипажа 1 поступает на устройства управления механизмами поворота и скоростей вращения валов 21 винтов управления и горизонтальной тяги 18. Механизм поворота и скоростей вращения валов 20 осуществляет наклон левого винта управления и горизонтальной тяги вниз по отношению направления полета, а правого винта управления и горизонтальной тяги соответственно вверх по отношению к направлению полета. Соответственно их тяги будут направлены вверх и вниз и левая половина вертолета наклонится вниз, а правая поднимается вверх, тем самым создавая крен влево. И соответственно левый винт управления и горизонтальной тяги получит через устройство управления механизмом поворота и скоростей вращения валов 21 команду на меньшую скорость вращения, чем правый. Так будет осуществлен разворот вертолета влево. При развороте вертолета вправо соответственно все будет наоборот. При прямолинейном движении вертолета валы 21 винтов управления и горизонтальной тяги 18 направлены параллельно направлению полета. При наборе вертолетом высоты валы 21 винтов управления и горизонтальной тяги 18 направлены вверх к направлению полета.
При наклонах первого кругового обода 7 полозья 36 вращаются в шарнирах 34 и скользят в направляющих 35, которые в свою очередь вращаются в шарнирах 33.
Таким образом, предложенное изобретение, используя улучшенную конструктивную схему, улучшенные механические и аэродинамические свойства вертолета, значительно расширяет возможности вертолета для поднятия больших тяжестей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТ | 1997 |
|
RU2118272C1 |
| ВЕРТОЛЕТ | 1997 |
|
RU2128130C1 |
| ВЕРТОЛЕТ МУЖИПОВА | 1999 |
|
RU2172703C2 |
| ВЕРТОЛЕТ | 1996 |
|
RU2110446C1 |
| ВЕРТОЛЕТ | 1997 |
|
RU2123962C1 |
| СПОСОБ ПЕРЕДАЧИ ТЯГИ ЛОПАСТЯМИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1997 |
|
RU2134214C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| ВЕРТОЛЁТ | 2013 |
|
RU2533374C1 |
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ | 1992 |
|
RU2005656C1 |

Изобретение относится к летательным аппаратам вертикального взлета. Вертолет содержит фюзеляж, двигатели, кабину экипажа, лопасти несущего винта, первый круговой обод и второй круговой обод. Первый круговой обод подвижно закреплен на фюзеляже с возможностью поворота. Первый круговой обод содержит круговой паз с закрепленными в нем катками. В пазу расположен второй круговой обод с шарнирно закрепленными в нем лопастями несущего винта. На втором круговом ободе закреплена зубчатая круговая дорожка для крепления двигателей. Такое выполнение вертолета позволит увеличить грузоподъемность, улучшить его конструктивную схему, а также механические и аэродинамические свойства. 8 з.п. ф-лы, 2 ил.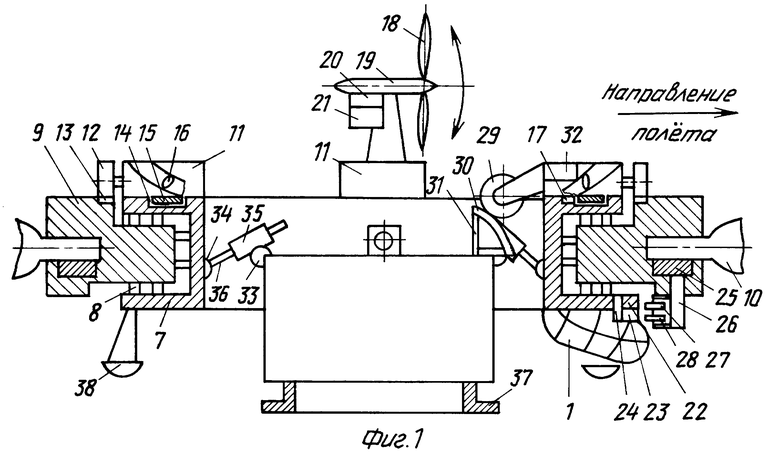
| US 4195800 A, 01.04.1980 | |||
| ВЕРТОЛЕТ | 1996 |
|
RU2110446C1 |
| US 4913376 A, 03.04.1990 | |||
| GB 1369411 A, 09.10.1974 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| DE 3830309 A1, 15.03.1990. | |||

