Изобретение относится к электротехнике, в частности к асинхронным электроприводам с частотно-токовым управлением, и может быть использовано в промышленных, транспортных и приборных электромеханических системах.
Известен частотно-регулируемый асинхронный электропривод с управлением по вектору главного потокосцепления двигателя, имеющий асинхронный электромеханический преобразователь, управляемый преобразователь частоты, контур регулирования модуля вектора главного потокосцепления и контур регулирования электромагнитного момента [Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с векторным управлением - Л.: Энергоатомиздат, Ленингр. отд-ние, 1987- 136 с.]-[1, с. 34-39].
Недостатком известного электропривода является сложность системы управления.
Известен частотно-регулируемый асинхронный электропривод с управлением по вектору потокосцепления ротора двигателя, имеющий асинхронный электромеханический преобразователь, управляемый преобразователь частоты, контур регулирования модуля вектора потокосцепления ротора двигателя и контур регулирования электромагнитного момента [1, с. 66-68].
Недостатком известного электропривода является сложность системы управления.
Наиболее близким к заявляемому электроприводу по составу и функциональным признакам является моментный асинхронный электропривод [Афанасьев А. Ю. Моментный электропривод. - Казань: Издат. КГТУ им. А.Н. Туполева, 1997. - 250 с.]- [2, с. 50-53].
Известный моментный асинхронный электропривод содержит асинхронный электромеханический преобразователь с двумя фазами на статоре и с короткозамкнутым ротором, датчик частоты вращения, сумматор, функциональный преобразователь, первый - третий перемножители, интегратор, идентификатор знака, корнеизвлекающее устройство, первый - второй усилители тока и задатчик частоты скольжения.
Ротор электромеханического преобразователя механически связан с ротором датчика частоты вращения, выход которого подключен к первому входу сумматора. Выходы задатчика частоты скольжения и идентификатора знака подключены к первому, второму входам третьего перемножителя, выход которого подключен ко второму входу сумматора, а его выход подключен ко входу интегратора. Его выход подключен ко входу функционального преобразователя, косинусный и синусный выходы которого подключены к первым входам первого, второго перемножителей. Их вторые входы подключены к выходу корнеизвлекающего устройства, а их выходы подключены ко входам соответственно первого, второго усилителей тока. К их выходам подключены первая, вторая фазы электромеханического преобразователя, а входом электропривода являются входы идентификатора знака и корнеизвлекающего устройства, на который подается сигнал, пропорциональный требуемому моменту.
Недостатком данного электропривода являются низкие КПД электромеханического преобразователя и энергетические характеристики электропривода в целом в связи с постоянством модуля частоты скольжения и отклонением ее от оптимального значения при изменении частоты вращения ротора.
Изобретение решает задачу повышения энергетических характеристик электропривода путем изменения частоты скольжения в функции от частоты вращения ротора по оптимальному закону.
Поставленная задача решается тем, что в электропривод, содержащий асинхронный электромеханический преобразователь с двумя фазами на статоре и с короткозамкнутым ротором, датчик частоты вращения, сумматор, функциональный преобразователь, первый - третий перемножители, интегратор, идентификатор знака, корнеизвлекающее устройство и первый - второй усилители тока, при этом ротор электромеханического преобразователя механически связан с ротором датчика частоты вращения, выход которого подключен к первому входу сумматора, выход идентификатора знака подключен ко второму входу третьего перемножителя, выход которого подключен ко второму входу сумматора, а его выход подключен ко входу интегратора, его выход подключен ко входу функционального преобразователя, косинусный и синусный выходы которого подключены к первым входам первого, второго перемножителей, их вторые входы подключены к выходу корнеизвлекающего устройства, а их выходы подключены ко входам соответственно первого, второго усилителей тока, к их выходам подключены первая, вторая фазы электромеханического преобразователя, а входом электропривода являются входы идентификатора знака и корнеизвлекающего устройства, введен второй функциональный преобразователь, вход которого подключен к выходу датчика частоты вращения, а выход подключен к первому входу третьего перемножителя, причем схема второго функционального преобразователя обеспечивает реализацию характеристики, построенной по приведенному в описании алгоритму.
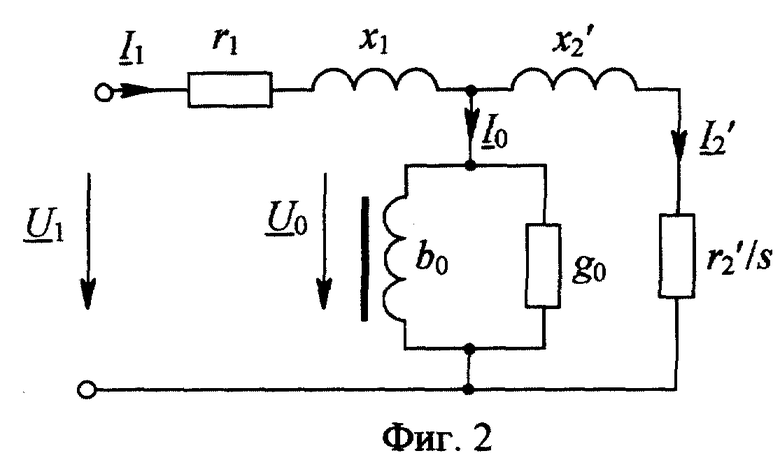
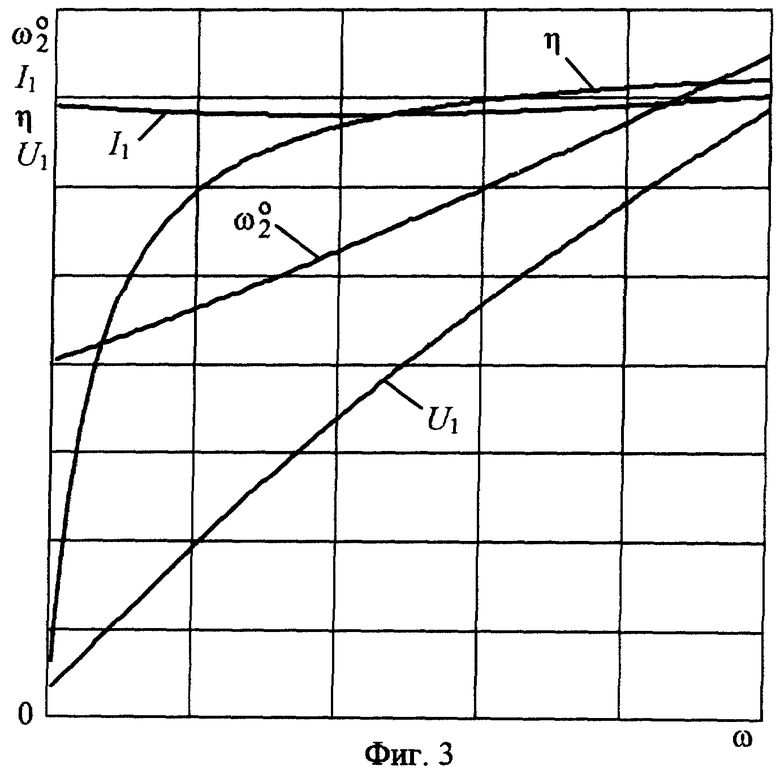
На фиг. 1 представлена функциональная схема асинхронного моментного электропривода. На фиг. 2 показана схема замещения фазы асинхронного двигателя. На фиг. 3 представлены зависимости частоты скольжения и действующего значения тока статора от частоты вращения ротора при фиксированном значении электромагнитного момента.
Моментный асинхронный электропривод на фиг. 1 содержит асинхронный электромеханический преобразователь 1 с фазами 2, 3 на статоре и с короткозамкнутым ротором 4, датчик 5 частоты вращения, сумматор 6, первый - второй функциональные преобразователи 7, 8, первый - третий перемножители 9 - 11, интегратор 12, идентификатор знака 13, корнеизвлекающее устройство 14 и усилители 15, 16 тока.
Ротор 4 механически связан с ротором датчика частоты вращения 5. Его выход подключен к первому входу сумматора 6 и ко входу второго функционального преобразователя 8, выход которого подключен к первому входу третьего перемножителя 11. Его второй вход подключен к выходу идентификатора знака 13, а выход подключен ко второму входу сумматора 6, выход которого подключен ко входу интегратора 12. Его выход подключен ко входу первого функционального преобразователя 7, косинусный и синусный выходы которого подключены к первым входам соответственно первого, второго перемножителей 9, 10. Их вторые входы подключены к выходу корнеизвлекающего устройства 14, а их выходы подключены ко входам соответственно первого, второго усилителей 15, 16 тока. К их выходам подключены соответственно фазы 2, 3 электромеханического преобразователя 1. Входом электропривода являются входы идентификатора знака 13 и корнеизвлекающего устройства 14.
Моментный асинхронный электропривод работает следующим образом. Датчик частоты вращения 5 вырабатывает сигнал, пропорциональный частоте вращения ротора ω, который поступает на первый вход сумматора 6 и на вход второго функционального преобразователя 8. На его выходе формируется сигнал, пропорциональный модулю оптимальной частоты скольжения |ω
i
пропорциональные оптимальным токам первой, второй фаз обмотки статора. Эти сигналы приходят на входы первого, второго усилителей тока 15, 16, питающие фазы 2, 3 обмотки статора токами iA≈ i
Зависимость оптимальной частоты скольжения ω
Расчет схемы проводится методом единичного тока по следующему алгоритму.
1 - полагаем 
2 - вычисляем 
3 - вычисляем 
4 - вычисляем 
5 - вычисляем 
6 - находим 
где m - число фаз обмотки статора; p - число пар полюсов.
7 - находим отношение номинального момента к найденному моменту
γ = Mo/Mp,
где Mo - номинальный момент; Mp - расчетный момент.
8 - определяем ток и напряжение фазы статора
9 - находим механическую мощность
Pм= Mo·ω/p.
10 - находим активную электрическую мощность
11 - находим КПД η = Pм/Pэ.
Задаваясь фиксированными значениями ω и изменяя ω2, вычисляем соответствующий КПД и одним из методов поиска экстремума (перебора, золотого сечения) определяем оптимальное значение ω и напряжения
и напряжения  фазы обмотки статора, графики которых приведены на фиг. 3.
фазы обмотки статора, графики которых приведены на фиг. 3.
На основании анализа результатов проведенной оптимизации можно сделать вывод, что при изменении частоты вращения ротора ω оптимальное значение тока фазы статора практически постоянно (I1 = const по ω) и принять
где K - постоянный коэффициент, а второй функциональный преобразователь 8 может быть построен по найденной зависимости ω
Таким образом, благодаря введению второго функционального преобразователя, схема которого обеспечивает реализацию характеристики, построенной по приведенному в описании алгоритму, электромеханический преобразователь развивает требуемый электромагнитный момент M = Mo при текущем значении частоты вращения ротора ω при минимальных суммарных потерях в меди и в стали, т.е. при максимальном КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2465715C1 |
| Вентильный электропривод | 2018 |
|
RU2706416C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2400918C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2198307C2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| Электропривод | 2019 |
|
RU2713185C1 |
| Следящий моментный электропривод | 1991 |
|
SU1815787A1 |
Изобретение может быть использовано в промышленных, транспортных и приборных электромеханических системах. Электропривод содержит асинхронный электромеханический преобразователь 1 с фазами 2, 3 на статоре и с короткозамкнутым ротором 4, датчик 5 частоты вращения, сумматор 6, первый синусно-косинусный функциональный преобразователь 7, первый - третий перемножители 9-11, интегратор 12, идентификатор знака 13, корнеизвлекающее устройство 14 и усилители 15, 16 тока. Входом электропривода являются входы блоков 13, 14, на которые подается сигнал требуемого момента. Технический результат - благодаря введению второго функционального преобразователя 8, схема которого обеспечивает реализацию характеристики, построенной по приведенному в описании алгоритму, реализуется оптимальная частота скольжения в функции от частоты вращения ротора, что позволяет получить требуемый электромагнитный момент при минимальной мощности потерь и максимальном КПД электропривода. 3 ил.
Моментный асинхронный электропривод, содержащий асинхронный электромеханический преобразователь с двумя фазами на статоре и с короткозамкнутым ротором, датчик частоты вращения, сумматор, функциональный преобразователь, первый - третий перемножители, интегратор, идентификатор знака, корнеизвлекающее устройство и первый, второй усилители тока, при этом ротор электромеханического преобразователя механически связан с ротором датчика частоты вращения, выход которого подключен к первому входу сумматора, выход идентификатора знака подключен ко второму входу третьего перемножителя, выход которого подключен ко второму входу сумматора, а его выход подключен ко входу интегратора, его выход подключен ко входу функционального преобразователя, косинусный и синусный выходы которого подключены к первым входам первого, второго перемножителей, их вторые входы подключены к выходу корнеизвлекающего устройства, а их выходы подключены ко входам соответственно первого, второго усилителей тока, к их выходам подключены первая, вторая фазы электромеханического преобразователя, а входом электропривода являются входы идентификатора знака и корнеизвлекающего устройства, отличающийся тем, что в него введен второй функциональный преобразователь, вход которого подключен к датчику частоты вращения, а выход подключен к первому входу третьего перемножителя, причем схема второго функционального преобразователя обеспечивает реализацию характеристики, построенной по приведенному в описании алгоритму.
| АФАНАСЬЕВ А.Ю | |||
| Моментный электропривод | |||
| - Казань: КГТУ им.А.Н.Туполева, 1997, с.50 - 53 | |||
| Моментный электропривод | 1979 |
|
SU828352A1 |
| Моментный электропривод | 1978 |
|
SU739701A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МОЛ1ЕНТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 0 |
|
SU243687A1 |
| RU 2073308 C1, 10.02.1997. | |||
