Предлагаемое изобретение относится к области измерения и может быть использовано для настройки и калибровки акселерометров и приборов, содержащих акселерометры.
Известен способ определения параметров прецизионных акселерометров, в частности, погрешности базовых установочных элементов и угловой деформации основания в плоскости, перпендикулярной оси его вращения, описанный в [1], включающий развороты акселерометра, закрепленного на вертикальном основании, вокруг горизонтальной оси и вокруг измерительной оси на некоторые, заранее заданные углы с одновременным наблюдением выходного сигнала.
Однако для реализации данного способа необходимо осуществлять вращение вокруг измерительной оси акселерометра, что не всегда возможно легко реализовать, т.к. требуется сложное оборудование.
Известен способ определения угловых координат измерительной оси акселерометра - прототип, описание которого приведено в [2]. Сущность данного способа заключается в том, что проводят два разворота акселерометра вокруг первой и второй горизонтальной оси на углы, при которых сигнал акселерометра равен нулю, и после этого, зная углы между осями вращения и осями ортогонального базиса и углы разворотов, вычисляют координаты измерительной оси акселерометра.
Способ позволяет определять угловые координаты измерительной оси акселерометра на простом технологическом оборудовании, однако он обеспечивает высокую точность только для акселерометров, не имеющих нулевой составляющей сигнала, т.е. для акселерометров, сигнал у которых равен нулю при отсутствии ускорения.
Задача изобретения - увеличение точности при определении угловых координат измерительной оси акселерометра.
Эта задача достигается тем, что в способе определения угловых координат α, β, γ измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающем два разворота вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, при этом первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси Х базиса, проводят на угол, при котором сигнал акселерометра равен нулю, из исходного положения производят также разворот акселерометра вокруг второй оси ОА2, расположенной в плоскости XOY под углом ϕ2 к оси X, дополнительно после первого разворота вокруг первой оси OA1 проводят из полученного положения второй разворот вокруг первой оси OA1 на 180°, измеряют в этом положении сигнал акселерометра U1, возвращают акселерометр в указанное исходное положение, после этого проводят из исходного положения третий разворот вокруг первой оси OA1 до получения сигнала с акселерометра 0,5 U1, фиксируют этот угол поворота λР1, затем возвращают акселерометр в исходное положение, указанный разворот вокруг второй оси ОА2 производят до получения сигнала с акселерометра 0,5 U1, фиксируют этот угол поворота λP2, a угловые координаты α, β и γ определяют из соотношений:
Cos2α+Cos2β+Cos2γ=1
Sin2λP1=Cos2γ:[1-(Cosϕ1×Cosα+Cosβ×Sinϕ1)2]
Sin2λP2=Cos2γ:[1-(Cosϕ2×Cosα+Cosβ×Sinϕ2)2]
На чертеже представлена базовая ортогональная система координат OXYZ и орт е (измерительная ось акселерометра), заданный углами α, β и γ, которые он образует с положительными направлениями осей OXYZ. Плоскость, заданная векторами OZ и е, образует прямой угол с плоскостью OXY. Вектор OA1 является осью первого разворота, принадлежит плоскости OXY и образует угол ϕ1 с вектором ОХ. Вектор ОА2 является осью второго разворота, принадлежит плоскости OXY и образует угол ϕ2 с вектором ОХ. Вектор OB1 показывает положение измерительной оси акселерометра после первого разворота вокруг оси OA1 до положения, при котором сигнал с акселерометра равен нулю. Вектор ОВ2 показывает положение измерительной оси акселерометра после второго разворота вокруг оси OA1 и образует угол 180° с вектором OB1. Вектор ОВ3 показывает положение измерительной оси акселерометра после третьего разворота вокруг оси OA1 на угол λP1. λР1 - это угол поворота акселерометра из начального положения вокруг оси OA1 до положения, при котором измерительная ось акселерометра будет принадлежать плоскости ХОУ (угол между плоскостью ХОУ и плоскостью, образованной векторами е и ОА1). λР2 - это угол поворота акселерометра из начального положения вокруг оси ОА2 до положения, при котором измерительная ось акселерометра будет принадлежать плоскости ХОУ. Угол δ - это угол между осью вращения OA1 и измерительной осью акселерометра. Дуга А1С и дуга а являются катетами сферического прямоугольного треугольника А1ВС с прямым углом С, а дуга с является его гипотенузой. Векторы OB1 и ОВ3 образуют между собой угол μ.
Определим соотношения между углами α, β, γ и λP1, λР1 в исходном состоянии. В этом случае угол δ, образованный векторами OA1 и е, можно выразить через направляющие косинусы как:

где Cos90° - это сомножитель, определяемый углом между векторами OZ и ОА1. Учитывая, что Cos(90°-ϕ1)=Sinϕ1, а Cos90°=0, последнее выражение примет вид:

Рассмотрим прямоугольный сферический треугольник А1ВС. В нем гипотенуза с определена углом δ, а катет а - углом (90°-γ). Исходя из формулы синусов для сферических треугольников (Sina/SinA1=Sinc/SinC), получим:

Учитывая, что Sin(90°-γ)=Cosγ, SinA1=SinλP1, a SinC=1, выражение (3) примет вид:

Далее запишем это выражение как:

Выразив Sinδ как (1-Cos2δ)0,5 и подставив значение Cosδ из соотношения (2), выражение (5) примет вид:

Подставив соответствующие углы λP2 и ϕ2 в данное выражение, получим третье уравнение предлагаемой системы уравнений для определения координат измерительной оси акселерометра:

После первого разворота вокруг оси OA1 до получения нулевого сигнала с акселерометра этот (нулевой) сигнал можно представить как:

где UHC - величина нулевой составляющей сигнала акселерометра, UC - полезный сигнал с акселерометра, вызванный воздействием ускорения свободного падения (составляющая, обусловленная углом μ). После второго разворота из полученного положения, вокруг первой оси OA1 на 180°, сигнал акселерометра U1 можно представить как:

Изменение знака у второго слагаемого вызвано изменением ориентации измерительной оси акселерометра на 180°.
Развернем акселерометр до получения сигнала с него, равного величине 0,5U1. Покажем, что в этом положении составляющая от силы тяжести UC равна нулю, или - измерительная ось акселерометра принадлежит горизонтальной плоскости OXY. Сигнал с акселерометра в данном положении можно представить 0,5U1=UHC+UC. Вместе с тем из совместного решения уравнений (8) и (9) следует, что UHC=0,5U1. С учетом этого UC=0, таким образом, измерительная ось акселерометра находится в плоскости горизонта. Это положение получается в результате третьего разворота вокруг оси ОА1 и четвертого разворота вокруг оси ОА2. Углы разворота из исходного положения в положение, при котором ось акселерометра находится в плоскости горизонта и есть углы λP1 и λP2 для системы уравнений для определения угловых координат.
Определение угловых координат α, β и γ измерительной оси е акселерометра осуществляется следующим образом. Пусть поворотная установка имеет платформу, которую можно горизонтировать и устанавливать на нее акселерометр (прибор, в котором установлены акселерометры). Поворотная установка имеет две измерительные оси вращения OA1 и ОА2 с точной фиксацией углов поворота, расположенные под углами ϕ1 и ϕ2 относительно оси X. Выставим плоскость OXY поворотной установки в горизонт. Проведем первый разворот платформы вокруг оси ОА1 на угол, при котором сигнал с акселерометра равен нулю. Проведем второй разворот вокруг оси OA1 на угол 180°. Проведем измерение сигнала U1 с акселерометра. Проведем вычисление величины 0,5U1. Возвратим акселерометр (платформу) в исходное положение. Проведем третий разворот платформы вокруг оси OA1 из исходного положения в положение, при котором сигнал с акселерометра равен 0,5U1. Проведем измерение угла λP1 - угла третьего разворота. Установим акселерометр в исходное положение (выставим плоскость OXY поворотной установки в горизонт). Проведем разворот платформы вокруг оси ОА2 из исходного положения в положение, при котором сигнал с акселерометра равен 0,5U1. Проведем измерение угла λР2 этого разворота. Подставим полученные величины λP1 и λР2 в систему уравнений и решим ее.
Эффект от использования предлагаемого способа заключается в том, что он обеспечивает увеличение точности при определении угловых координат измерительной оси акселерометра за счет учета нулевой составляющей сигнала. На практике часто приходится использовать акселерометры с наличием нулевой составляющей сигнала, и чем она выше, тем ниже точность при определении угловых координат у способа-прототипа. Оценим точность определения угловых координат у известного и предлагаемого решения. Пусть, например, величина нулевой составляющей сигнала акселерометра будет 10-3 от максимального измеряемого сигнала, а величина нестабильности нулевой составляющей сигнала акселерометра составит 10-4 от максимального измеряемого сигнала. Для наглядности примем, что погрешность измерений существенно ниже, чем погрешность, обусловленная нулевой составляющей сигнала и нестабильностью нулевой составляющей сигнала акселерометра, и поэтому не будем ее учитывать. В таком случае при развороте вокруг измерительной оси OA1 до получения нулевого сигнала с акселерометра, у способа-прототипа, этот сигнал можно представить как:

где UHC - величина нулевой составляющей сигнала акселерометра, UHHC - величина, отражающая нестабильность нулевой составляющей сигнала акселерометра и UC - сигнал с акселерометра, пропорциональный углу λП - углу между осью чувствительности и плоскостью горизонта. Этот угол и является погрешностью в определении углов λ1 и λ2. Или что то же самое:

где G - максимальный измеряемый сигнал. Подставляя выбранные нами значения в выражение и преобразуя его, получим:
λП=-arcsin[10-3+10-4]=0,063°
Величина погрешности λП при определении углов λ1 и λ2 у способа-прототипа приведет к неточному вычислению угловых координат α, β и γ, причем величина погрешности αП, βП и γП, будет примерно того же порядка (зависит от соотношения углов λ, α, β и γ). У предлагаемого решения, после трех разворотов вокруг измерительной оси ОА1 для компенсации нулевой составляющей сигнала, выражение (10) можно представить как:
0=UHHC+UC. Подставляя выбранные нами значения и преобразуя выражение, получим:
λП=-arcsin[10-4]=0,0057°, что приведет к погрешности в вычислении угловых координат α, β и γ, причем величина погрешности будет значительно ниже, чем у способа-прототипа. Т.е. при таком выборе нулевой составляющей сигнала и нестабильности нулевой составляющей сигнала акселерометра точность в определении угловых координат у предлагаемого решения гораздо выше. Кроме этого необходимо подчеркнуть, что нестабильность нулевой составляющей сигнала акселерометра для известного решения должна быть взята для всего срока эксплуатации, а у предлагаемого решения речь идет о нестабильности нулевой составляющей в течение времени измерения угловых координат, что позволяет получить еще большую точность.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Для реализации данного способа необходима платформа с не менее чем двумя рамками карданного подвеса (двумя степенями свободы), например, такая, как представлена в [3], страница 158.
Литература
1. Патент Российской Федерации №02117950 от 20.08.98. Способ определения параметров прецизионных акселерометров. G01P 21/00.
2. Патент Российской Федерации №02164693 от 29.07.99. Способ определения угловых координат измерительной оси акселерометра. G01P 21/00.
3. Савант С.Дж., Ховард Р., Соллоуай С., Савант С.А. Принципы инерциальной навигации. Издательство "Мир", 1965 г.
Изобретение относится к измерительной технике и может быть использовано для настройки калибровки акселерометров и приборов, содержащих акселерометры. Способ определения угловых координат измерительной оси акселерометров заключается в определенной последовательности разворотов акселерометра относительно различных горизонтальных осей, положение которых известно относительно ортогонального базиса, на заданные углы. Угловые координаты определяются из соответствующих соотношений. Повышение точности в определении угловых координат достигается за счет учета нулевой составляющей сигнала акселерометра. Данный способ позволяет использовать простое технологическое оборудование (с меньшим числом степеней свободы) для калибровки приборов, содержащих акселерометры, или использовать универсальное оборудование, на котором невозможно устанавливать прибор с необходимой ориентацией, например, при несоответствии геометрических размеров оборудования и прибора. 1 ил.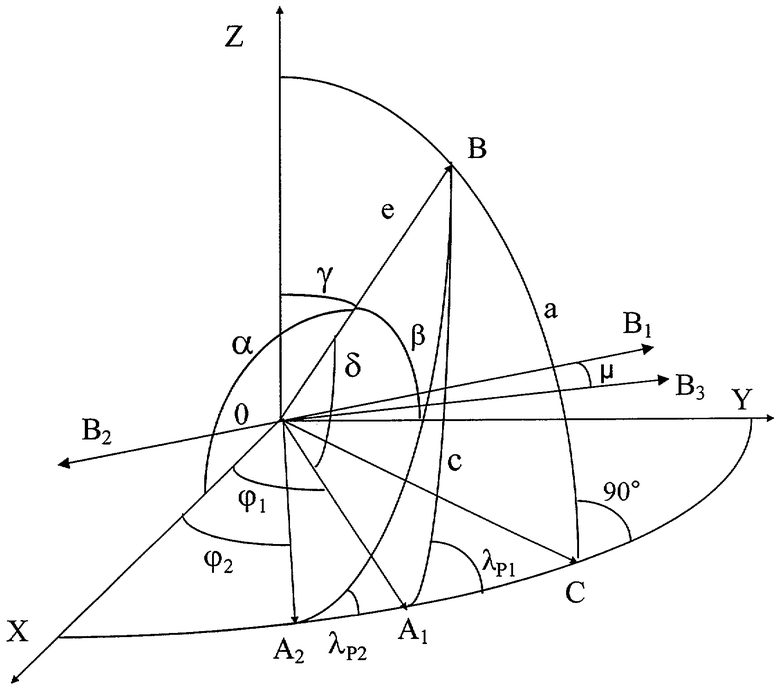
Способ определения угловых координат α, β, γ измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающий два разворота вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, при этом первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси Х базиса, проводят на угол, при котором сигнал акселерометра равен нулю, из исходного положения производят, также, разворот акселерометра вокруг второй оси ОА2, расположенной в плоскости XOY под углом ϕ2 к оси X, отличающийся тем, что после первого разворота вокруг первой оси OA1 проводят из полученного положения второй разворот вокруг первой оси OA1 на 180°, измеряют в этом положении сигнал акселерометра U1, возвращают акселерометр в указанное исходное положение, после этого проводят из исходного положения третий разворот вокруг первой оси OA1 до получения сигнала с акселерометра 0,5U1, фиксируют этот угол поворота λP1, затем возвращают акселерометр в исходное положение, указанный разворот вокруг второй оси OA2 производят до получения сигнала с акселерометра 0,5U1, фиксируют этот угол поворота λP2, а угловые координаты α, β и γ определяют из соотношений:
Cos2α+Cos2β+Cos2γ=1;
Sin2λP1=Cos2γ:[1-(Cosϕ1·Cosα+Cosβ·Sinϕ1)2];
Sin2λP2=Cos2λ:[1-(Cosϕ2·Cosα+Cosβ·Sinϕ2)2].
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ИЗМЕРИТЕЛЬНОЙ ОСИ АКСЕЛЕРОМЕТРА | 1999 |
|
RU2164693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННЫХ АКСЕЛЕРОМЕТРОВ | 1994 |
|
RU2117950C1 |
| US 6823279 В1, 23.11.2004 | |||
| JP 9251031 А, 22.09.1997. | |||

