Изобретение относится к автомобилестроению и может быть использовано для ручного управления приводами тормоза, сцепления и акселератора.
Известны устройства для ручного управления педалью тормоза, педалью акселератора, содержащие управляющие штоки, рукоятки управления тормозом и акселератором (см. патенты РФ N 2017629, 2043215 МПК B 60 K 26/02).
Недостатками этих устройств является то, что в них присутствуют педали, рычаги и рукоятки - органы управления для каждого из вышеуказанных приводов, занимающие пространство в автомобиле и вызывающие трудности при управлении приводами.
Наиболее близким по функциональным возможностям является устройство для ручного управления приводами тормоза, сцепления и акселератора, содержащее рычаг управления тормозом, рукоятку управления акселератором и сцеплением, имеющую возможность вращаться (мотоциклетного типа), и трос акселератора, прикрепленный к рукоятке (см. свидетельство РФ на полезную модель N 7062, МПК B 60 K 41/28).
Недостатками этого устройства являются:
- наличие педалей тормоза, сцепления, газа и рычагов, действующих на педали тормоза и сцепления, занимающих пространство в салоне автомобиля, а кроме этого, усложняющих конструкцию устройства и увеличивающих ее металлоемкость;
- невозможность отключения сцепления при экстренном торможении, ввиду того, что рычаг, управляющий сцеплением и торможением, не может перемещаться одновременно в двух противоположных направлениях;
- наличие двух разных ручек для управления тормозом и акселератором, что с точки зрения управления автомобилем, тем более инвалидами, вызывает дополнительные трудности (требуют дополнительное время на реакцию);
- устройство закреплено на рулевой колонке и движение рычага происходит в плоскости рулевой колонки в направлении вперед-низ, что а) с точки зрения эргономики вызывает неудобство, б) требует больших мускульных усилий от водителя;
- рукоятка управления акселератором не фиксируется в промежуточном положении, что не позволяет снимать руку с рукоятки во время движения.
С целью упрощения конструкции устройства ручного управления приводами тормоза, сцепления и акселератора, снижения его металлоемкости при одновременном увеличении функциональных возможностей устройства (возможность одновременного выключения сцепления при экстренном торможении и самофиксации рукоятки при любых ее манипуляциях: повороте и вращении), улучшения его эргономических свойств, устройство для ручного управления приводами тормоза, сцепления, и акселератора, содержащее рычаг управления тормозом, рукоятку управления акселератором и сцеплением, имеющую возможность вращаться и трос акселератора, прикрепленный к рукоятке, снабжают многофункциональным рычагом. На нижнем конце этого рычага, шарнирно установленном на неподвижной оси, жестко устанавливают рычаг толкателя тормоза главного цилиндра. Для увеличения передаточного отношения механизма и снижения мускульных усилий при торможении ось прикрепляют к полу кузова автомобиля. На верхнем, свободном конце рычага шарнирно устанавливают Г-образную ось. На одном конце этой оси устанавливают рукоятку, имеющую возможность вращаться в двух взаимно перпендикулярных плоскостях. На другом конце оси устанавливают механизм привода сцепления, представляющий собой неподвижно закрепленный к оси кривошип, к которому шарнирно прикрепляют трос сцепления. Для снижения усилия на рукоятке и самофиксации ее при выключении сцепления, кривошип и многофункциональный рычаг соединяют пружиной.
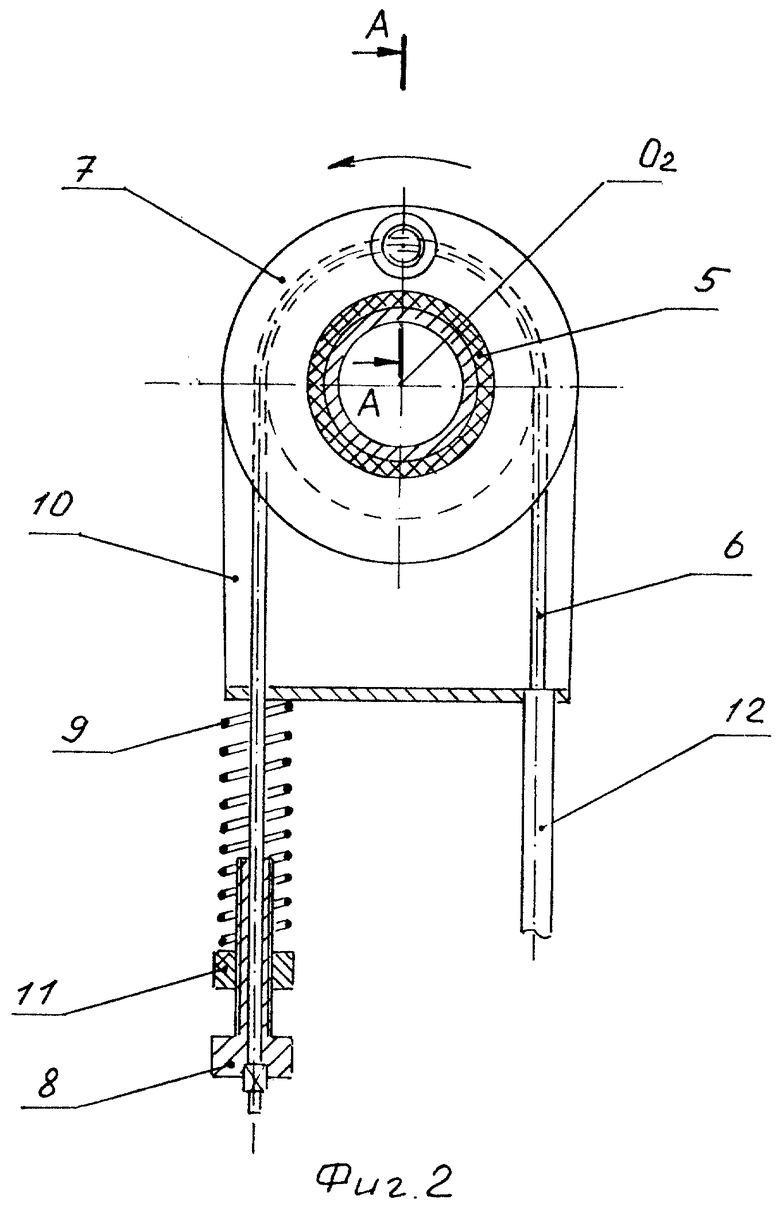
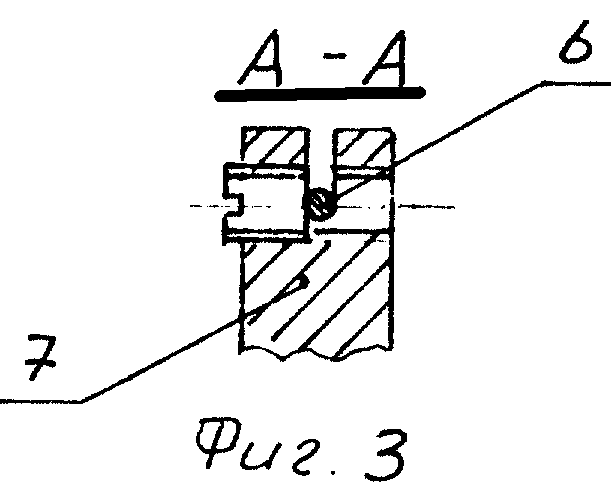
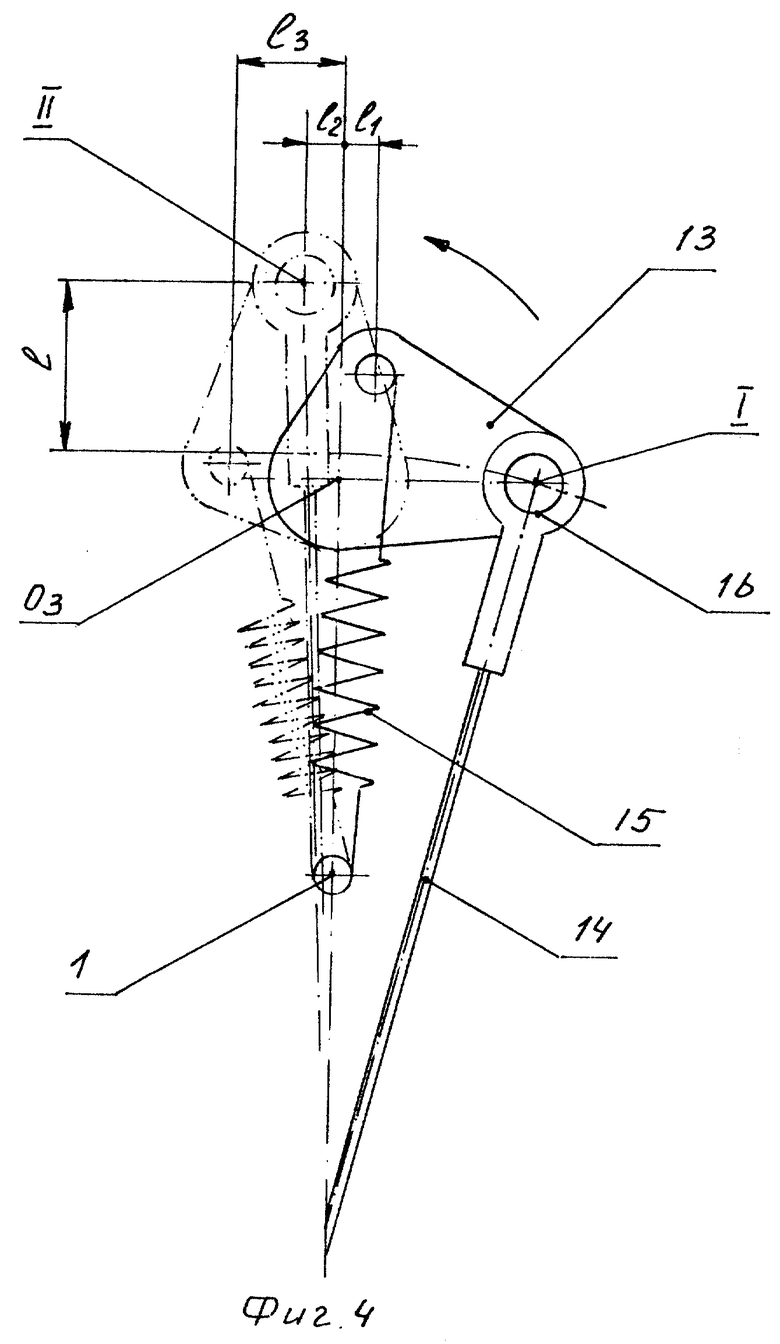
На фиг. 1 показан общий вид устройства для ручного управления приводами тормоза, сцепления и акселератора, на фиг. 2 показан механизм управления акселератором, на фиг. 3 показан разрез А-А фиг. 2, на фиг. 4 показан механизм управления приводом сцепления.
Устройство для ручного управления приводами тормоза, сцепления и акселератора выполнено следующим образом. На нижнем конце многофункционального рычага 1, который шарнирно установлен на неподвижной оси O1, жестко прикреплен рычаг 2 толкателя штока главного тормозного цилиндра. Ось O1 закреплена на полу кузова автомобиля. На верхнем конце рычага 1 во втулке 3 установлена Г-образная ось 4, которая образована двумя неподвижно связанными между собой осями O2 и O3. На оси O2 установлена рукоятка 5. Ось O2 является осью вращения рукоятки 5. На ней установлен механизм управления акселератором, который состоит из троса акселератора 6, шарнирно закрепленного во фланце 7 рукоятки 5 и регулировочном болте 8, компенсационной пружины 9, закрепленной с одной стороны к кронштейну 10, а с другой - к гайке 11, регулирующей ее сжатие, оболочки 12 троса акселератора 6, которая торцем прикреплена к кронштейну 10. Ось O3 - ось поворота рукоятки 5. На ней установлен механизм привода сцепления, состоящий из кривошипа 13, жестко прикрепленного к оси поворота O3 рукоятки 5, троса сцепления 14, шарнирно закрепленного к кривошипу 13, пружины 15, снижающей усилие на рукоятку 5 при ее повороте вокруг оси O3. Место крепления шарнира 16 троса сцепления 14 на кривошипе 13 определяется величиной рабочего хода выключения сцепления (l). Место крепления пружины 15 на кривошипе 13 находится вблизи мертвой точки (на величине плеча l1 от мертвой точки), на рычаге 1 определяется характеристикой выбранной пружины.
Устройство работает следующим образом.
При нажатии на рукоятку 5 по направлению стрелки А, рычаг 1 поворачивается вокруг оси O1 и через рычаг толкателя штока главного тормозного цилиндра 2 включает тормозную систему автомобиля. При вращении рукоятки 5 вокруг оси O2 по направлению стрелки Б, трос акселератора 6, шарнирно закрепленный во фланце 7 рукоятки 5, вытягивается из оболочки 12. Происходит увеличение оборотов двигателя, при этом возврату троса при прекращении воздействия на рукоятку 5 препятствует компенсационная пружина 9, сила сжатия которой регулируется гайкой 11. При силе сжатия пружины 9, равной силе втягивания троса 6 в оболочку 12, рукоятка 5 фиксируется в любом промежуточном положении за счет сил трения между тросом 6 и оболочкой 12. Усилия, необходимые для вращения рукоятки 5 при этом минимальны. При повороте рукоятки 5 на 90o в направлении стрелки В из положения I в положение II, происходит поворот кривошипа 13 вокруг оси O3, неподвижно закрепленной с осью O2, при этом, трос сцепления 14 вытягивается на величину рабочего хода (l) выключения сцепления. Центр шарнира 16 троса 14 переходит через верхнюю мертвую точку кривошипа 13 на величину l2, равную величине плеча l1 - места крепления пружины 15 от мертвой точки. Центр крепления пружины 15 переходит через мертвую точку на величину плеча l3. За счет этого, с помощью силы втягивающей трос 14 и пружины 15 происходит фиксация рукоятки 5 в положении выключенное сцепление. Так как при выключении сцепления верхний конец пружины 15 быстрее проходит через верхнюю мертвую точку, чем шарнир 16 троса 14, то пружина 15 начинает противодействовать силе втягивающей трос 14, что снижает усилие на рукоятке 5 при выключении сцепления. Возможность совместного или раздельного вращения рукоятки в двух взаимно перпендикулярных плоскостях позволяет осуществлять функции тормоза, сцепления и управления дроссельными заслонками карбюратора одновременно и независимо друг от друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РУЧНОГО УПРАВЛЕНИЯ ПРИВОДАМИ ТОРМОЗА, СЦЕПЛЕНИЯ, АКСЕЛЕРАТОРА | 2000 |
|
RU2178362C2 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ДУБЛИРУЮЩЕГО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2010 |
|
RU2435680C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО УПРАВЛЕНИЯ ПРИВОДОМ АКСЕЛЕРАТОРА | 2002 |
|
RU2246411C2 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ДУБЛИРУЮЩЕГО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2014 |
|
RU2552784C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ДУБЛИРУЮЩЕГО УПРАВЛЕНИЯ АВТОМОБИЛЕМ НАПОЛЬНОГО КРЕПЛЕНИЯ | 2015 |
|
RU2610755C1 |
| Устройство дублирующей педали акселератора для управления автомобилем напольного крепления | 2019 |
|
RU2720454C1 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2000 |
|
RU2191711C2 |
| АВТОМАТИЧЕСКИЙ СТОЯНОЧНЫЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2129502C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ НАЧАЛА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ПОДЪЕМЕ | 2018 |
|
RU2744259C1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2000 |
|
RU2188135C2 |
Изобретение относится к автомобилестроению и может быть использовано в автомобилях с ручным управлением для водителей-инвалидов без ног. Устройство ручного управления приводами тормоза, акселератора, сцепления снабжено многофункциональным рычагом, к нижнему концу которого, шарнирно установленное на неподвижной оси, жестко прикреплен рычаг толкателя тормоза главного цилиндра. На верхнем конце многофункционального рычага шарнирно установлена Г-образная ось. На одном конце Г-образной оси закреплен механизм управления сцеплением, включающий кривошип, трос сцепления и пружину. На другом конце Г-образной оси установлена рукоятка управления акселератором, имеющая возможность вращения в двух взаимно перпендикулярных плоскостях и при этом самофиксироваться. Данная конструкция позволяет упростить и сделать более удобным управление, а также увеличить функциональные возможности устройства. 1 з.п.ф-лы, 4 ил.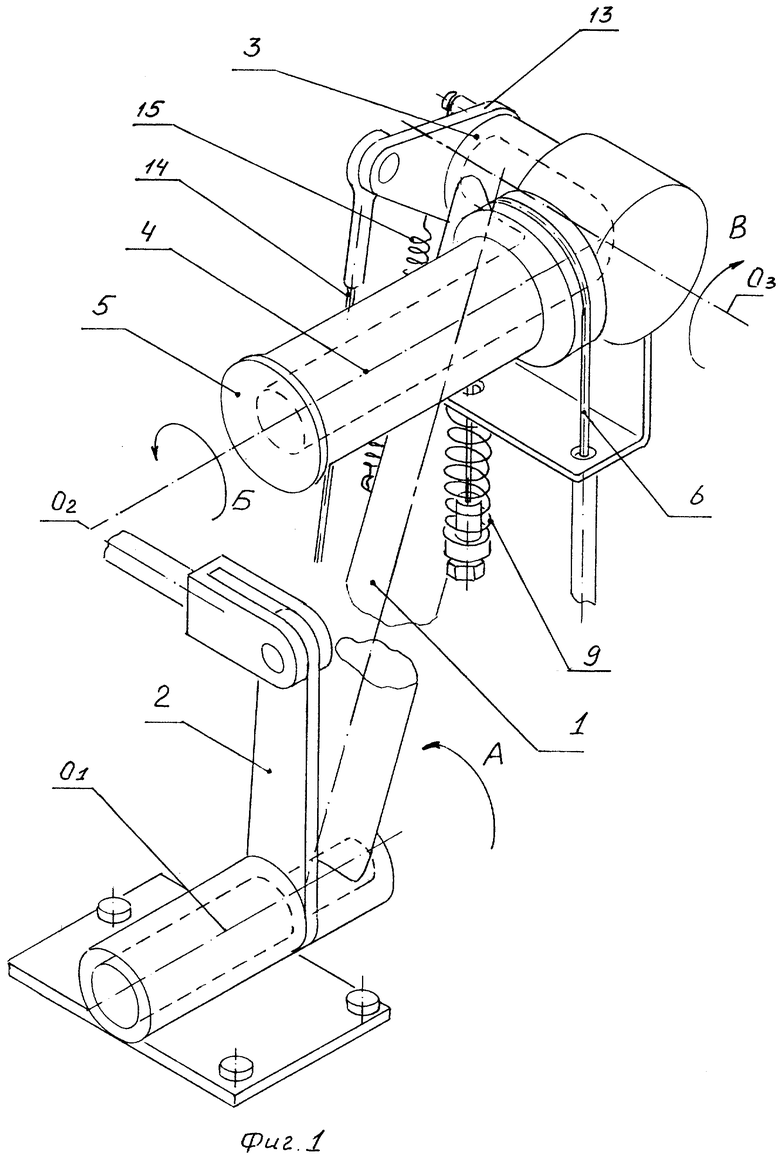
| РУЧНОЕ УПРАВЛЕНИЕ АВТОМОБИЛЕМ | 1949 |
|
SU79125A1 |
| Устройство для ручного управления автомобилем | 1949 |
|
SU85931A1 |
| Способ декремнизации воды | 1944 |
|
SU69090A1 |
| Способ получения сложных эфиров карбоновых кислот | 1958 |
|
SU114673A1 |
| Автоколлимационная установка для контроля асферических поверхностей | 1960 |
|
SU139082A1 |
| US 4324309 А, 13.04.1982 | |||
| СПОСОБ ОБРАБОТКИ ПЫЛЯЩИХ ПОВЕРХНОСТЕЙ | 2015 |
|
RU2615005C1 |
| US 4216805 А1, 25.11.1993 | |||
| DE 19715992 А1, 08.01.1998 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ЭЛЕКТРИЧЕСКИЙ МЕХАНИЗМ ВНУТРЕННЕЙ ПРОВОДКИ | 2006 |
|
RU2407093C2 |

