Изобретение относится к домкратам, в частности - к устройствам для перемещения элементов шасси автомобиля в процессе их крепления к кузову последнего.
Известен винтовой механизм перемещения груза (см. а.с. N 1588703, МКИ B 66 F 3/16), содержащий корпус с направляющими втулками, в которых смонтированы скалки, связанные между собой траверсой с закрепленным на ней ходовым винтом, гайка которого смонтирована в корпусе и снабжена ведомой конической шестерней. С противоположных сторон от последней, в подвижной и подпружиненной относительно корпуса втулке, размещены ведущие конические шестерни, которые установлены с возможностью попеременного зацепления с указанной ведомой шестерней. При этом ведущие конические шестерни смонтированы на валах, приводимых соответственно от ручного приводного органа и от электродвигателя. Механизм переключения с ручного приводного органа на электрический представляет из себя гайку, навинченную на резьбу, выполненную на наружной поверхности подвижной втулки со стороны, противоположной ее подпружиненному концу. Гайка оперта своим торцом на наружную боковую поверхность корпуса, а электродвигатель смонтирован на подвижной втулке и через систему шестерен связан с ведомой цилиндрической шестерней соответствующего приводного вала.
Основным недостатком известного устройства является необходимость непосредственного и поочередного зацепления ведущих конических шестерен с ведомой конической шестерней винтовой пары, что приводит к ударам, повышенному и преждевременному износу зубьев и как следствие - некачественному зацеплению. Кроме того, данный механизм обеспечивает лишь одну скорость перемещения груза при работе от ручного приводного органа, что сужает технологические возможности устройства. Следует также сказать, что процесс переключения привода с электрического на ручной и наоборот, требующий отворачивания и заворачивания гайки, является довольно трудоемким м малопроизводительным.
Задачей заявляемого изобретения является расширение технологических возможностей, повышение производительности и надежности работы, обеспечение удобства обслуживания при сохранении высокой степени безопасности выполняемых работ и получение технического результата, заключающегося в исключении ударных нагрузок на зубья шестерен, возможность работы на повышенной или пониженной передаче от ручного приводного органа, быстрое и удобное переключение с одной указанной передачи на другую, а также с ручного на механический привод, при этом обеспечивается невозможность одновременной работы двух последних.
Для решения вышеперечисленных задач и получения указанного технического результата в известном винтовом механизме перемещения груза, содержащем корпус с направляющими втулками, в которых смонтированы скалки, связанные между собой траверсой с закрепленным на ней ходовым винтом, гайка которого смонтирована в корпусе и снабжена ведомой конической шестерней, зацепленной с ведущей конической шестерней приводного вала, снабженного ведомой цилиндрической шестерней и приводимого от механического привода, приводной вал с ручным приводным органом, снабженный ведущей шестерней, и механизм переключения с ручного привода на механический, ведущая шестерня приводного вала с ручным приводным органом выполнена цилиндрической и постоянно зацеплена с ведомой цилиндрической шестерней вала, приводимого от механического привода, выполненного в виде гайковерта, при этом указанные валы дополнительно снабжены соответственно ведущей, и ведомой цилиндрическими шестернями, также находящимися в постоянном зацеплении. Ведущие шестерни имеют шпоночные пазы и установлены свободно относительно своего приводного зала, а ведомые цилиндрические шестерни установлены жестко на своем приводном валу, при этом на конце последнего закреплена шестигранная головка для подсоединения головки гайковерта, механизм переключения с ручного привода на механический выполнен в виде подпружиненной шпонки, которая шарнирно установлена на ручном приводном органе (штурвале) и расположена в продольном пазу соответствующего приводного вала с возможностью возвратно-поступательного перемещения посредством передвижения штурвала и попеременного захода ее конца в шпоночные пазы ведущих цилиндрических шестерен и выхода последнего в нейтральное положение, соответствующее приводу винтового механизма от гайковерта. Штурвал ручного приводного вала расположен со стороны шестигранной головки вала, приводимого от гайковерта, при этом радиус штурвала значительно превышает бесцентровое расстояние между указанными валами. Поэтому для доступа головки гайковерта к шестигранной головке приводного вала в нейтральном положении шпонки и соответственно штурвала в последнем на указанном выше расстоянии по радиусу выполнены отверстия, причем диаметр их меньше наружного диаметра головки гайковерта. Привод гайковерта может быть выполнен электрическим или пневматическим. Кроме того, штурвал снабжен подпружиненным шариковым фиксатором, установленным с возможностью заскакивания в последовательно расположенные на соответствующем приводном валу канавки, число которых равно количеству положений шпонки. При этом шпоночные пазы каждой ведущей цилиндрической шестерни расположены равномерно по окружности под углом 90o.
Наличие постоянного зацепления ведомой конической шестерни винтовой пары с ведущей конической шестерней вала, приводимого от гайковерта, а также находящихся в постоянном зацеплении ведущих и ведомых цилиндрических шестерен соответственно ручного и механического приводных валов, позволяет исключить возникновение ударных нагрузок на зубья шестерен при переходе на различные режимы работы винтового механизма, что ведет к более качественному зацеплению и повышению надежности работы. При этом выполнение самого механизма переключения с ручного привода на механический в виде подпружиненной шпонки, которая шарнирно связана с перемещаемым и фиксируемым на соответствующем валу штурвалом и расположена в продольном пазу данного вала, причем конец шпонки попеременно заходит в один из четырех шпоночных пазов каждой ведущей цилиндрической шестерни или находится в нейтральном положении, соответствующем приводу от гайковерта, позволяет быстро и без особых усилий переходить с ручного на механический привод и наоборот, что повышает производительность и удобство обслуживания. Кроме того, наличие двух ведущих и ведомых цилиндрических шестерен делает возможным работу винтового механизма от ручного приводного органа (штурвала) на пониженной или повышенной передаче, что расширяет технологические возможности устройства. Причем наличие четырех равномерно расположенных шпоночных пазов в каждой ведущей цилиндрической шестерне позволяет быстрее осуществить их зацепление с концом шпонки. Следует также сказать, что заполнение радиуса штурвала заведомо большие межцентрового расстояния между приводными валами и расположение его со стороны шестигранной головки чисто визуально затрудняет доступ к последней головки гайковерта при работе от ручного привода. При этом, чтобы в последнем случае полностью исключить даже преднамеренный доступ головки гайковерта к шестигранной головке приводного вала, диаметр отверстий в штурвале, через которые проходит указанная шестигранная головка при перемещении штурвала со шпонкой в нейтральное положение, выбирается меньшим наружного диаметра головки гайковерта. Все это делает абсолютно безопасным эксплуатацию заявляемого винтового механизма. Следует также заметить, что использование в качестве механического привода - гайковерта, делает предлагаемый винтовой механизм более универсальным, поскольку его можно использовать, в частности, в линиях сборки автомобилей, где в большом количестве используются электрические и пневматические гайковерты для различных крепежных операций. При этом отпадает необходимость использования энергоподводов к движущимся спутникам в случае применения в них аналогичных подъемных устройств с неподвижно установленными электродвигателями, что повышает удобство обслуживания и значительно сокращает затраты на данный технологический процесс.
На фиг. 1 показан общий вид винтового механизма перемещения груза.
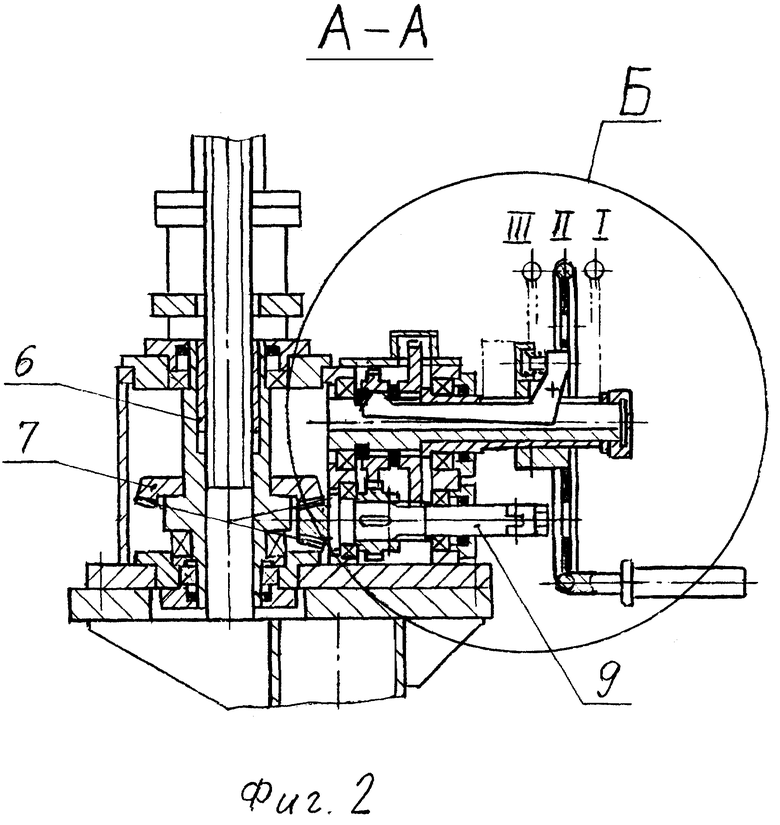
На фиг. 2 - разрез А-А на фиг. 1 - шпонка в положении, соответствующем ручному приводу на пониженной передаче.
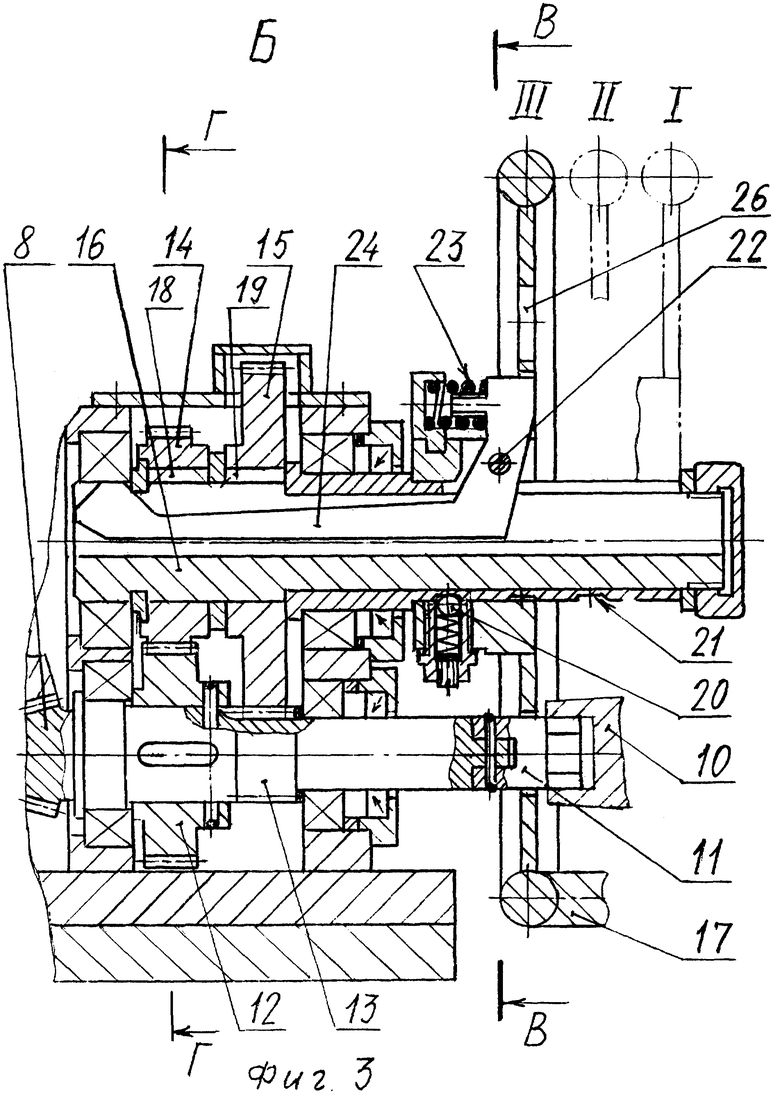
На фиг. 3 - вид Б на фиг. 2 - шпонка в нейтральном положении, соответствующем приводу от гайковерта.
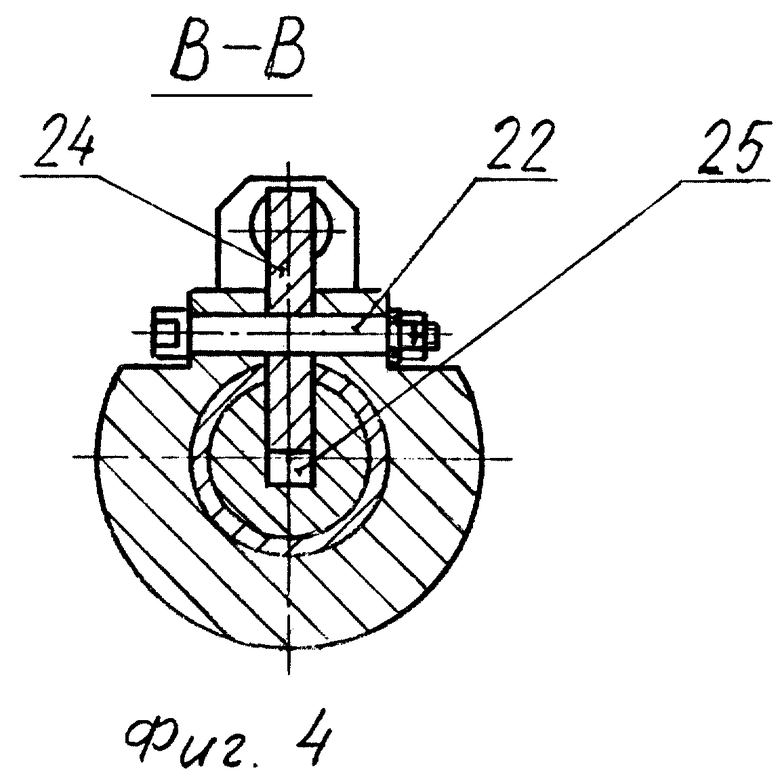
На фиг. 4 - разрез В-В на фиг. 3.
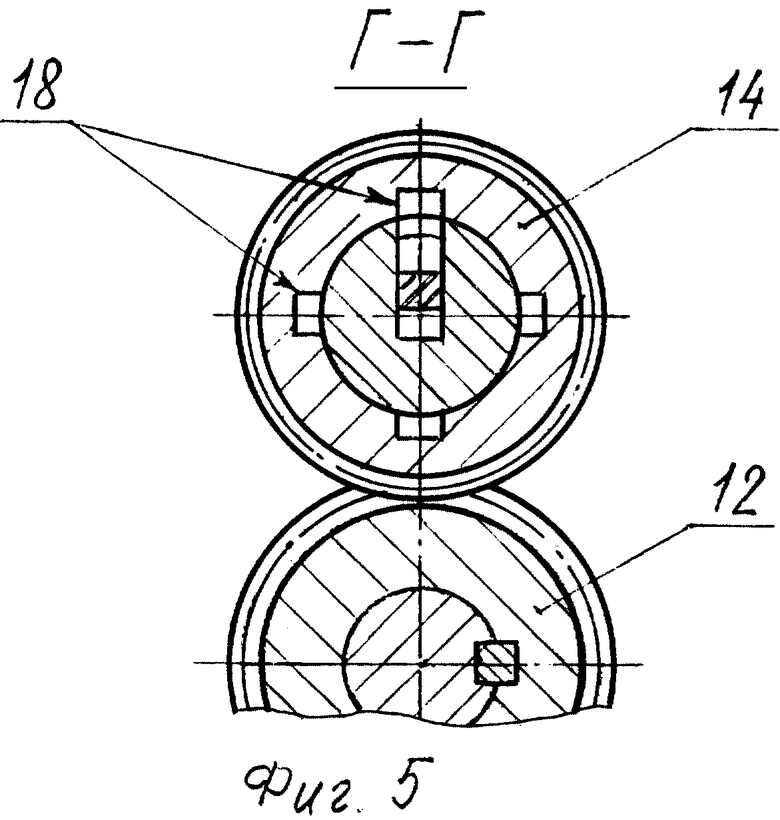
На фиг. 5 - разрез Г-Г на фиг. 3.
Винтовой механизм перемещения груза состоит из корпуса 1 с направляющими втулками 2, в которых смонтированы скалки 3, связанные между собой траверсой 4 с закрепленным на ней кодовым винтом 5, гайка 6 которого смонтирована в корпусе 1 и снабжена ведомой конической шестерней 7, зацепленной с ведущей конической шестерней 8 вала 9, приводимого от гайковерта 10, для чего на конце вала закреплена шестигранная головка 11. На указанном валу жестко установлены ведомые цилиндрические шестерни 12 и 13, которые постоянно зацеплены соответственно с ведущими цилиндрическими шестернями 14 и 15, установленными свободно относительно вала 16, приводимого ручным приводным органом (штурвалом) 17. В шестернях 14 и 15 выполнены соответственно шпоночные пазы 18 и 19, которые расположены равномерно по окружности под углом 90o. Штурвал 17 расположен со стороны шестигранной головки 11 вала 9 и выполнен с возможностью передвижения по валу 16 и фиксации на нем с помощью подпружиненного шарикового фиксатора 20, который заскакивает в последовательно расположенные на валу 16 канавки 21. На оси 22 штурвала 17 шарнирно установлена подпружиненная пружиной 23 шпонка 24, которая посредством передвижения штурвала 17 имеет возможность возвратно-поступательного перемещения в продольном пазу 25 приводного вала 16 и попеременного захода ее конца в шпоночные пазы 18 и 19 ведущих цилиндрических шестерен 14 и 15, а также выхода конца шпонки в нейтральное положение, соответствующее приводу винтового механизма от гайковерта 10. Причем в последнем случае, для доступа головка гайковерта к шестигранной головке 11 приводного вала 9, в штурвале 17 предусмотрены отверстия 26, которые выполнены с возможностью прохода через любое из них указанной шестигранной головки. И наоборот - диаметр отверстий выбирается меньшим наружного диаметра головки гайковерта, чтобы предотвратить доступ последней к шестигранной головке 11 при работе механизма от ручного привода.
Винтовой механизм перемещения груза работает следующим образом.
В крайнем выдвинутом положении штурвала 17 (I), который зафиксирован подпружиненным фиксатором 20 в одной из канавок 21, шарнирно связанная с ним шпонка 24, при повороте штурвала и под воздействием пружины 23, заходит своим концом в ближайший шпоночный паз 19 ведущей цилиндрической шестерни 15. При дальнейшем вращении штурвала 17 крутящий момент передается на ведомую цилиндрическую шестерню 13 приводного вала 9 и далее через конические шестерни 8, 7 и гайку 6 - на ходовой винт 5, который вместе с траверсой 4 перемещает установленный на ней груз. При этом, благодаря соотношению диаметров шестерен 15 и 13, обеспечивается высокая скорость перемещения.
В среднем положении штурвала 17 (II), конец шпонки 24 заходит в шпоночный паз 18 другой ведущей цилиндрической шестерни 14, которая передает вращение ведомой цилиндрической шестерне 12 вала 9. Далее аналогичным образом происходит перемещение траверсы 4 с находящимся на ней грузом, причем в данном случае, по сравнению с предыдущем, подъем происходит с меньшей скоростью.
Для перемещения груза с помощью гайковерта 10, штурвал 17 сдвигают до упора влево (III), в результате чего шпонка 24 перемещается в нейтральное положение и ее конец выходит из шпоночного паза 18. Одновременно с этим шестигранная головка 11 приводного вала 9 проходит через ближайшее к ней отверстие 26, выполненное в штурвале 17, и тем самым оказывается доступной для подсоединения к ней головки гайковерта 10. В этом случае вращение ведущей конической шестерне 8 передается напрямую, а шестерни 14 и 15, находящиеся в зацеплении соответственно с шестернями 12 и 13, свободно вращаются относительно своего приводного зала 16, причем возможный все же в этом случае проворот указанного вала и соответственно штурвала 17 исключается за счет надежного стопорения последнего с помощью цилиндрической части шестигранной головки 11, находящейся в одном из отверстий 26, что в конечном счете способствует безопасности выполняемых работ. При перегрузках происходит либо пробуксовка фрикционной муфты в электрических гайковертах, либо работа до упора в гайковертах с пневматическим приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРИВОДА ВРАЩЕНИЯ НОЖЕЙ ДИСКОВЫХ НОЖНИЦ | 2007 |
|
RU2368468C2 |
| УСТРОЙСТВО ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ ПОД ДАВЛЕНИЕМ УСО-70 | 2015 |
|
RU2603413C2 |
| МОБИЛЬНОЕ ТОКАРНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТОРЦОВ КРУПНОГАБАРИТНЫХ ОБЕЧАЕК | 2001 |
|
RU2200075C2 |
| Превентор плашечный | 2024 |
|
RU2829686C1 |
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 1990 |
|
RU2016210C1 |
| СПОСОБ УСТАНОВКИ И ФИКСИРОВАНИЯ РАБОЧИХ ОРГАНОВ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2000 |
|
RU2191696C2 |
| БУНКЕР-ВОРОШИТЕЛЬ | 1998 |
|
RU2143339C1 |
| ГАЙКОВЕРТ | 2012 |
|
RU2506155C1 |
| Винтовой механизм перемещения груза | 1988 |
|
SU1588703A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
Изобретение относится к подъемным устройствам. Винтовой механизм перемещения груза содержит корпус с направляющими втулками, в которых смонтированы скалки, связанные между собой траверсой с закрепленным на ней ходовым винтом, гайка которого смонтирована в корпусе и снабжена ведомой конической шестерней, зацепленной с ведущей конической шестерней приводного вала, снабженного ведомой цилиндрической шестерней и приводимого от механического привода, приводной вал с ручным приводным органом, снабженный ведущей шестерней, и механизм переключения с ручного привода на механический. Ведущая шестерня приводного вала с ручным приводным органом выполнена цилиндрической и постоянно зацеплена с ведомой цилиндрической шестерней вала, приводимого от механического привода, выполненного в виде гайковерта, при этом указанные валы дополнительно снабжены соответственно ведущей и ведомой цилиндрическими шестернями, также находящимися в постоянном зацеплении, причем ведущие цилиндрические шестерни имеют шпоночные пазы и установлены свободно относительно своего приводного вала. Ведомые цилиндрические шестерни установлены жестко на своем приводном валу, при этом на конце последнего закреплена шестигранная головка для присоединения головки гайковерта. Механизм переключения с ручного привода на механический выполнен в виде подпружиненной шпонки, шарнирно установленной на ручном приводном органе (штурвале) и расположенной в продольном пазу соответствующего приводного вала с возможностью возвратно-поступательного перемещения посредством передвижения штурвала и попеременного захода ее конца в шпоночные пазы ведущих цилиндрических шестерен и выхода этого конца шпонки в нейтральное положение, соответствующее приводу винтового механизма от гайковерта. Изобретение обеспечивает повышение удобства эксплуатации. 3 з.п. ф-лы, 5 ил.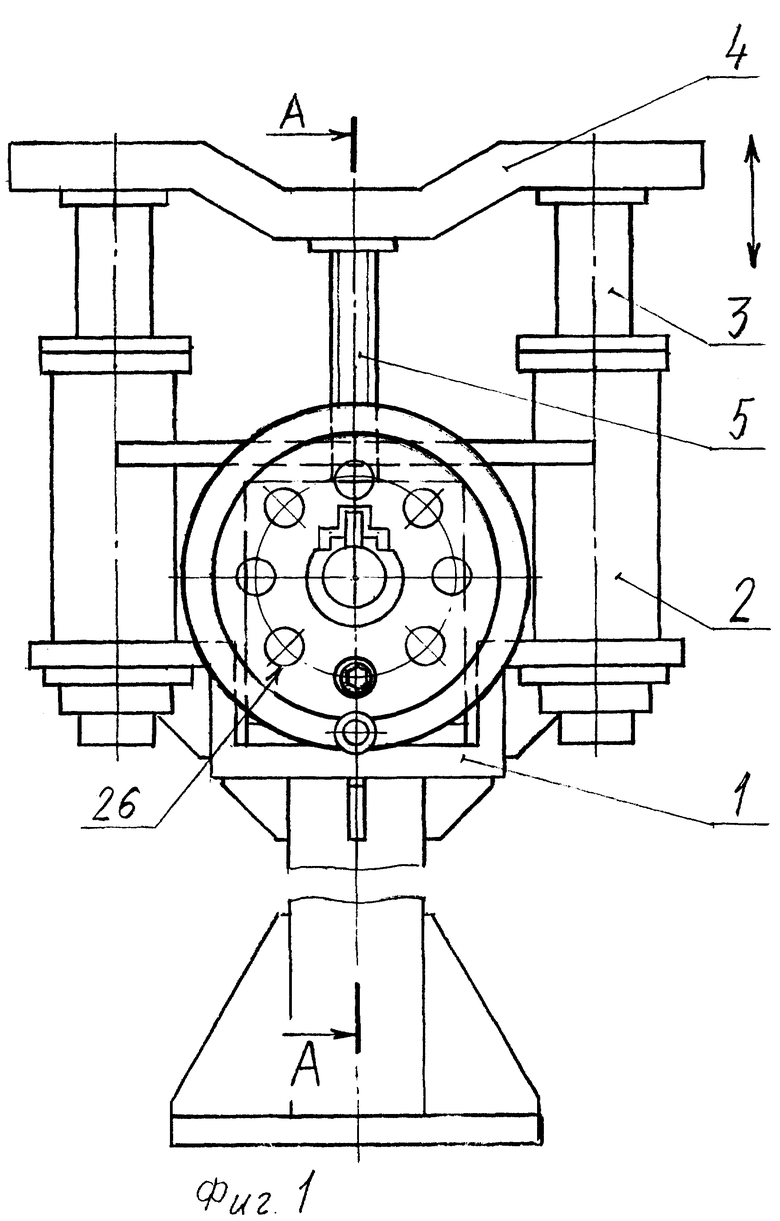
| Винтовой механизм перемещения груза | 1988 |
|
SU1588703A1 |
| RU 2060229 С1, 20.05.1996 | |||
| US 5085407 A, 04.02.1992 | |||
| DE 3642938 A1, 19.06.1987. | |||

