..
о о
4
О) 5
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| Схват промышленного робота | 1987 |
|
SU1516349A1 |
| Кантователь | 1989 |
|
SU1703366A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Зажимной механизм | 1985 |
|
SU1291391A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Двухкоординатный дефлектор | 1982 |
|
SU1041979A1 |
| Манипулятор для загрузки-разгрузки технологических машин | 1987 |
|
SU1445943A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
МАНИПУЛЯТОР, содержащий основание, схват, механизм перемещения схвата, установленный на основании, шток, на котором закреплен схват, и позиционирующее устройство, о т л и ч а ю щ и и с я тем, что, с целью повышения точности позиционирования, л-вханизм перемещения схвата выполнен в виде пьезоэлектрических пластин, заключенных в корпус и установленных с возможностью взаимодействия со щтоком, а позициотшрующее устройство выполнено в виде пьезофиксаторов и набора пьезоколец, надетых на шток, причем пьезофиксаторы расположены пе краям пьезоколец, а, механизм перемещения и позиционирующее устройство связаны между собой дополнительно введенным датчиком позиционирования.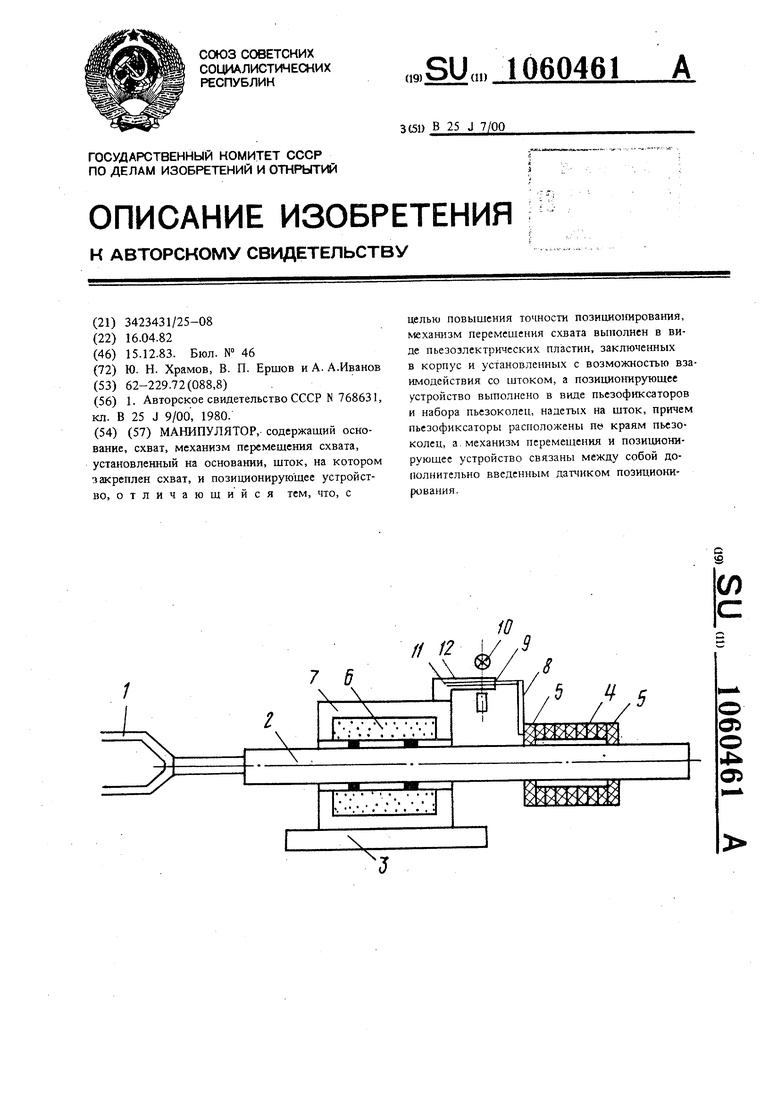
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот с дискретным позиционированием | 1978 |
|
SU768631A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
