Предлагаемое изобретение относится к области машиностроения, в частности тракторостроения.
У существующих современных колесных тракторов классической компоновки с передними управляемыми колесами увеличенного диаметра естественно возникают проблемы с минимальной колеей. Суть данных проблем состоит в том, что при повороте колес они упираются в раму или несущий остов трактора. Для развязки компоновки требуется увеличивать колею, что и имеет место на реальных конструкциях, в том числе зарубежных.
Данная проблема могла бы быть разрешена путем создания колесных тракторов с шарнирной рамой (типа тракторов Т-150, К-700 и др.), однако подобная компоновка вступает в противоречие с технологическими требованиями обеспечения нормальной работы агрегатируемых с трактором сельхозорудий как предназначенных для пропашных работ, так и для пахоты. Упомянутое противоречие состоит в возникновении вредных поперечных смещений сельхозмашин, возникающих в работе, приводящих либо к подрезу корней растений при междурядной обработке, либо невозможности работы колес в борозде при работе с плугом.
Уже известна самоходная машина, содержащая раму, состоящую из трех частей, последовательно соединенных между собой с возможностью поворота одной части относительно другой, причем передняя часть рамы связана с передним мостом, задняя - с задним мостом, а средняя расположена между ними. Механизм управления поворотом частей рамы выполнен с гидравлическим приводом (а.с. ЧССР N 263 718, B 62 D 21/14, опубл. 1988 г.).
Указанная машина позволяет эффективно и плавно изменять положение средней части относительно передней и задней в процессе эксплуатации. Однако это регулирование частей рамы осуществляется в вертикальной плоскости и не предназначено для самоходных машин, производящих сельскохозяйственные операции с точным движением в междурядьях.
Известна также самоходная машина, содержащая раму, состоящую из последовательно соединенных с возможностью поворота одной относительно другой передней части, связанной с передним мостом, средней части и задней части, связанной с задним мостом, и механизм управления поворотом частей рамы, причем соединение средней части рамы с передней и задней выполнено в виде двух шарниров, размещенных вдоль продольной оси машины, один из которых выполнен в виде шарнира с вертикальной и горизонтальной осями, а другой - в виде шарнира с вертикальной осью (см. И.И. Селиванов. Автомобили и транспортные гусеничные машины высокой проходимости. "Наука". М., 1967, стр. 218-219).
Как наиболее близкая к предлагаемой по технической сущности она принята в качестве прототипа.
Задача данного изобретения состоит в реализации минимально возможной колеи в конструкции универсального сельскохозяйственного трактора при устранении вредных поперечных смещений агрегатируемых с ним сельскохозяйственных орудий при движении машинотракторного агрегата в борозде или междуряьях.
Для достижения поставленной задачи предложена самоходная машина, содержащая раму, состоящую из последовательно соединенных с возможностью поворота одной относительно другой передней части, связанной с передним мостом, средней части и задней части, связанной с задним мостом, и механизм управления поворотом частей рамы, в которой согласно изобретению соединение средней части рамы с передней и задней выполнено в виде двух шарниров, размещенных вдоль продольной оси машины, один из которых выполнен в виде шарнира с вертикальной и горизонтальной осями, а другой - в виде шарнира с вертикальной осью.
Длины частей рамы могут быть связаны между собой следующей зависимостью:
где l1 - длина передней части рамы,
l2 - длина средней части рамы,
α - угол поворота передней части рамы вокруг вертикальной оси прилегающего к ней шарнира, измеренный относительно продольной оси машины,
β - угол поворота средней части рамы вокруг вертикальной оси прилегающего в задней части рамы шарнира, измеренный относительно продольной оси машины.
Проведенный анализ патентной и научно-технической литературы не выявил известных технических решений с вышеуказанными признаками.
Сущность предлагаемой машины поясняется графически.
На фиг. 1 показана предлагаемая самоходная машина, вид сбоку,
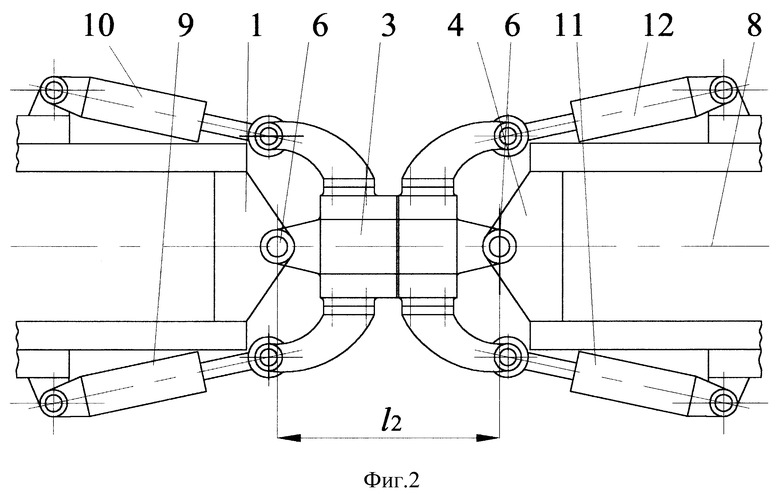
на фиг. 2 показан вид сверху на шарнирно-сочлененную раму машины,
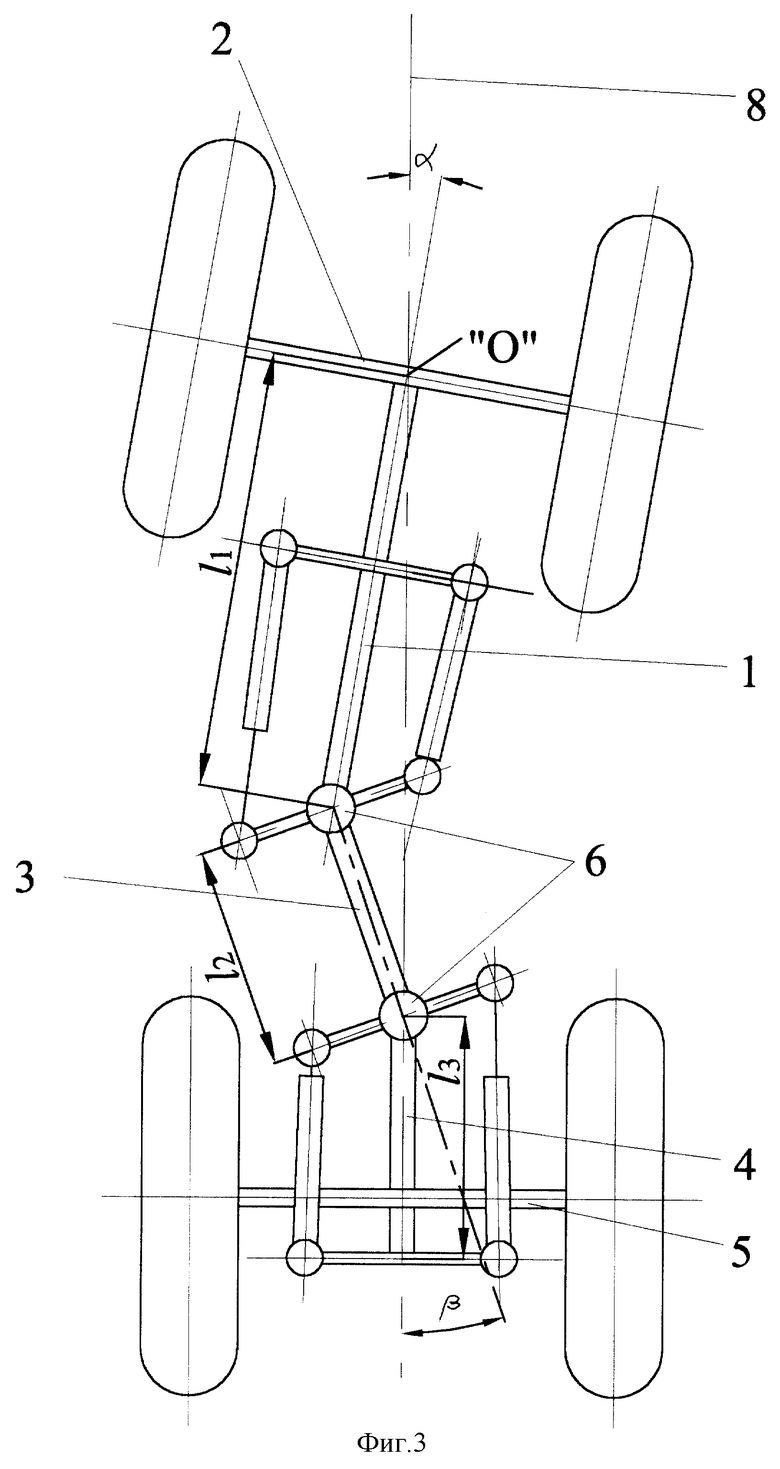
на фиг. 3 показана схема размещения осей частей сочлененной рамы при подвороте /стадия I/,
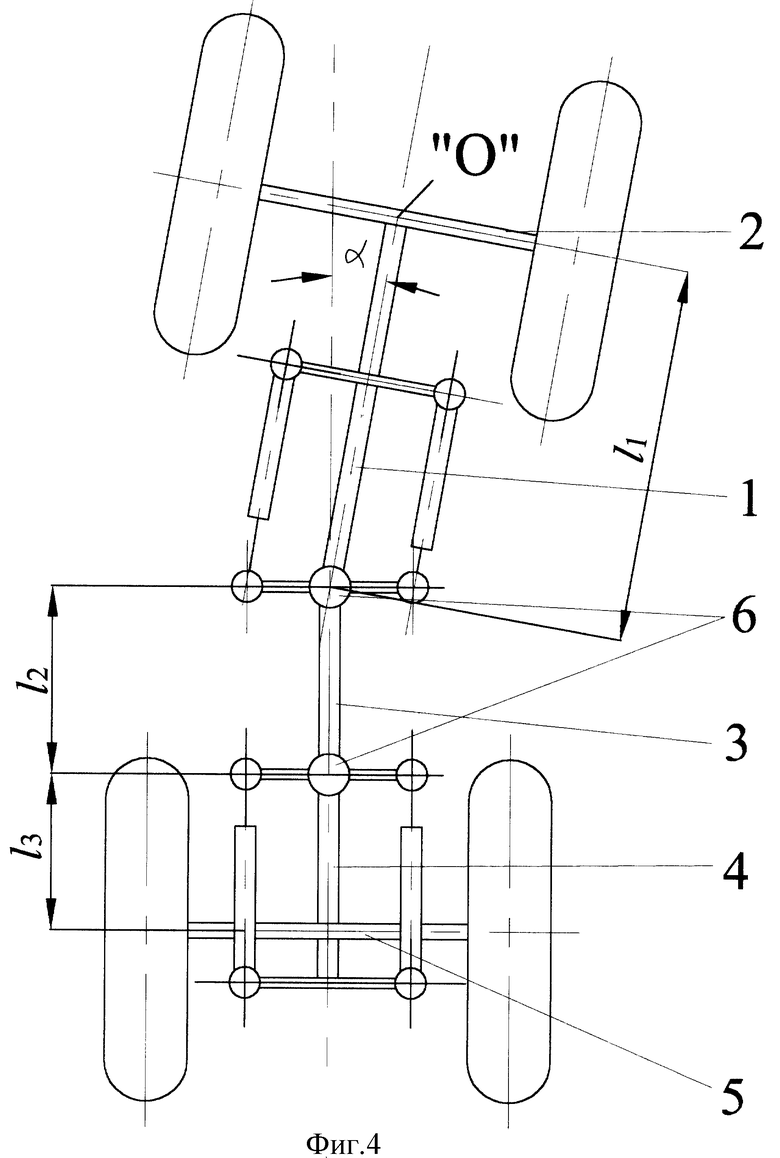
на фиг. 4 показана схема размещения осей частей рамы при подвороте /стадия II/,
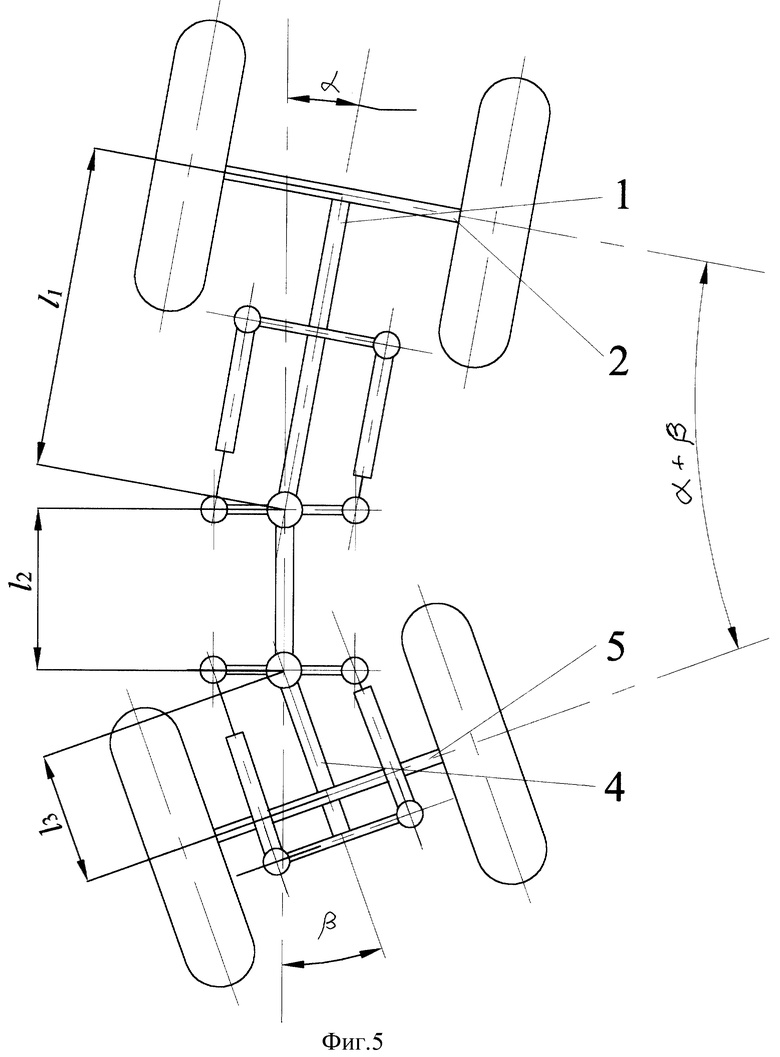
на фиг. 5 показана схема размещения осей частей рамы при крутом развороте /стадия III/.
Предлагаемая самоходная машина, например трактор /см. фиг.1,2/, содержит шарнирно-сочлененную раму, состоящую из последовательно соединенных: передней части 1, имеющей длину l1, связанной с передним мостом 2, средней части 3, имеющей длину l2, и задней части 4 длиной l3, связанной с задним мостом 5. Указанные части рамы соединены двумя шарнирами 6 и 7, размещенными вдоль продольной оси 8 машины, причем один из них, например шарнир 6, размещенный на стыке средней части с передней, выполнен в виде шарнира с вертикальной и горизонтальной осями, а другой шарнир 7, размещенный на стыке средней части с задней, выполнен в виде шарнира с вертикальной осью. Шарнир с горизонтальной осью может быть совмещен с любым из вертикальных шарниров.
Механизм управления поворотом частей рамы выполнен в виде симметрично относительно продольной оси 8 машины расположенных гидроцилиндров 9 и 10, осуществляющих угловой поворот передней части 1 рамы, а также гидроцилиндров 11 и 12, осуществляющих угловой поворот задней части 4 относительно средней части 3 рамы.
Совместное действие приводов для угловых смещений передней части 1 рамы вокруг вертикальной оси шарнира 6, размещенного на стыке со средней частью 3, и для угловых смещений средней части 3 рамы вокруг вертикальной оси шарнира 7, размещенного на стыке с задней частью 4 рамы, соответственно на углы α и β посредством гидроцилиндров 9-10 и 11-12, осуществляют системой рулевого управления, настроенной на заданную программу таким образом, чтобы по мере необходимости выполнялась следующая последовательность стадий поворота, каждая из этих стадий может быть осуществлена независимо.
Так, I стадия /см. схему на фиг. 3/ - подворот, при котором происходит синхронное угловое смещение на угол α передней части 1 с мостом 2 в сторону подворота и средней части 3 на угол β в противоположную сторону. На этой стадии осуществляется относительно точная корректировка направления движения машины, поскольку центр "0" переднего моста остается на середине колеи, а ось задней части 4 с задним мостом 5 остается на продольной оси 8 машины благодаря оптимальному соотношению углов поворота.
II стадия /см. схему на фиг. 4/ - поворот, при котором предельное угловое смещение передней части 1 рамы остается в пределах α = 10-12o, а средняя часть 3 смещается в сторону поворота с уменьшением угла β до нуля, когда оси средней части 3 и задней части 4 рамы будут совпадать.
III стадия /см. схему на фиг. 5/ - крутой разворот, когда наибольшее угловое смещение передней части 1 сохраняется, а задняя часть 4 рамы смещается в сторону разворота до предельного значения угла β = 18-20o. В этом случае угол между осями переднего 2 и заднего 5 мостов составляет сумму α+β ≅30-32o при наименьшем радиусе разворота.
Предлагаемая самоходная машина вместе с агрегатируемыми с ней сельскохозяйственными орудиями позволяет осуществлять пахотные и пропашные работы с точным движением в междурядьях без поперечных смещений орудий, а следовательно, без подрезки корней.
Управление предлагаемой машиной так же эффективно, как управление трактором традиционной компоновки с жесткой рамой.
Являясь новым, имеющим изобретательский уровень, предлагаемое техническое решение готово к использованию в сельскохозяйственном машиностроении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАВЕШИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ОРУДИЙ НА ТРАКТОР | 1999 |
|
RU2159526C1 |
| ТРАКТОР-УНИВЕРСАЛ С ШАРНИРНО СОЕДИНЁННЫМИ ПОЛУРАМАМИ | 2014 |
|
RU2576847C2 |
| Устройство управления передними колесами тягового загрузчика | 1991 |
|
SU1789406A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТЯГОВО-ТРАНСПОРТНОЕ И ЭНЕРГЕТИЧЕСКОЕ СРЕДСТВО | 2012 |
|
RU2499379C2 |
| МАШИНА ДЛЯ РУБОК УХОДА ЗА ЛЕСОМ | 1996 |
|
RU2121265C1 |
| КОЛЕСНЫЙ ТРАКТОР | 2004 |
|
RU2303546C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| Транспортное устройство сельскохозяйственного назначения | 1987 |
|
SU1463149A1 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1160955A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к самоходным транспортным средствам, в частности к силовым конструктивным элементам - рамам самоходных машин повышенной маневренности, собранных из нескольких частей. Оно может быть использовано в тракторах, предназначенных в том числе для возделывания пропашных культур при точном движении в междурядьях. Сущность изобретения состоит в том, что предложена самоходная машина, содержащая раму, состоящую из трех частей, последовательно соединенных с возможностью поворота одной части относительно другой, и механизм управления поворотом частей, причем передняя часть рамы связана с передним мостом, задняя - с задним мостом машины. Соединение средней части рамы с передней и задней в виде двух шарниров, размещенных вдоль продольной оси машины, один из которых выполнен в виде шарнира с вертикальной и горизонтальной осями, а другой - в виде шарнира с вертикальной осью, а длины частей рамы связаны между собой следующей зависимостью:  , где l1 - длина передней части рамы, l2 - длина средней части рамы, α - угол поворота передней части рамы вокруг вертикальной оси прилегающего к ней шарнира, измеренный относительно продольной оси машины, β - угол поворота средней части рамы вокруг вертикальной оси прилегающего к задней части рамы шарнира, измеренный относительно продольной оси машины. Технический результат заключается в возможности проведения сельскохозяйственных операций с точным движением в междурядьях, исключающим смещение агрегатов. 5 ил.
, где l1 - длина передней части рамы, l2 - длина средней части рамы, α - угол поворота передней части рамы вокруг вертикальной оси прилегающего к ней шарнира, измеренный относительно продольной оси машины, β - угол поворота средней части рамы вокруг вертикальной оси прилегающего к задней части рамы шарнира, измеренный относительно продольной оси машины. Технический результат заключается в возможности проведения сельскохозяйственных операций с точным движением в междурядьях, исключающим смещение агрегатов. 5 ил.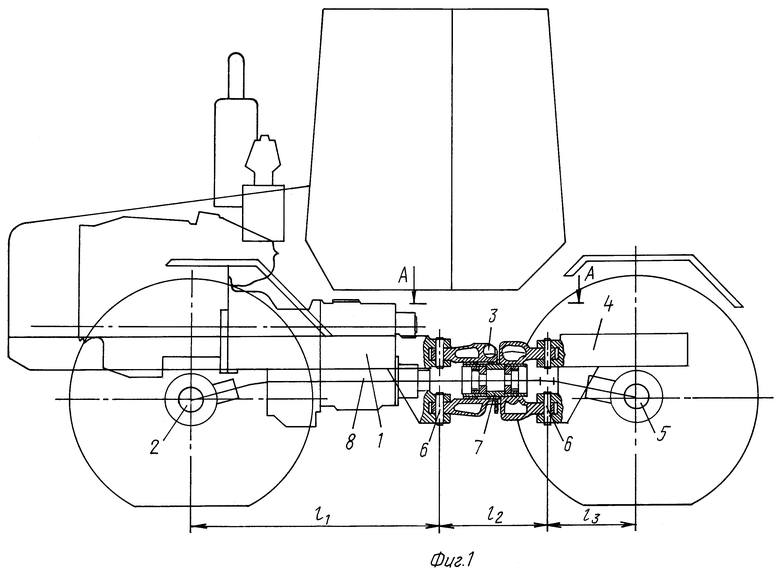
Самоходная машина, содержащая раму, состоящую из последовательно соединенных с возможностью поворота одной относительно другой передней части, связанной с передним мостом, средней части и задней части, связанной с задним мостом, и механизм управления поворотом частей рамы, причем соединение средней части рамы с передней и задней выполнено в виде двух шарниров, размещенных вдоль продольной оси машины, один из которых выполнен в виде шарнира с вертикальной и горизонтальной осями, а другой - в виде шарнира с вертикальной осью, отличающаяся тем, что длины передней и средней частей рамы могут быть связаны между собой следующей зависимостью
где l1 - длина передней части рамы;
l2 - длина средней части рамы;
α - угол поворота передней части рамы вокруг вертикальной оси прилегающего к ней шарнира, измеренный относительно продольной оси машины;
β - угол поворота средней части рамы вокруг вертикальной оси прилегающего к задней части рамы шарнира, измеренный относительно продольной оси машины.
| СЕЛИВАНОВ И.И | |||
| АВТОМОБИЛИ И ТРАНСПОРТНЫЕ ГУСЕНИЧНЫЕ МАШИНЫ ВЫСОКОЙ ПРОХОДИМОСТИ, - М.: НАУКА, 1967, с.218-219 | |||
| 0 |
|
SU263718A1 | |
| FR 15277759 A, 29.04.1968 | |||
| Автопоезд для транспортировки длинномерных грузов | 1986 |
|
SU1440773A1 |
| Самоходная машина | 1974 |
|
SU536080A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |

