Изобретение относится к управлеште) горно-транспортными процессами на карьерах горных предприятий и касается автоматического контроля рейсов карьерных самосвалов, перевозящих горную массу.
Целью изобретения является упрощение устройства контроля рейсов карьерных автосамосвалов, оборудованных электрическим приводом ведущих колес.
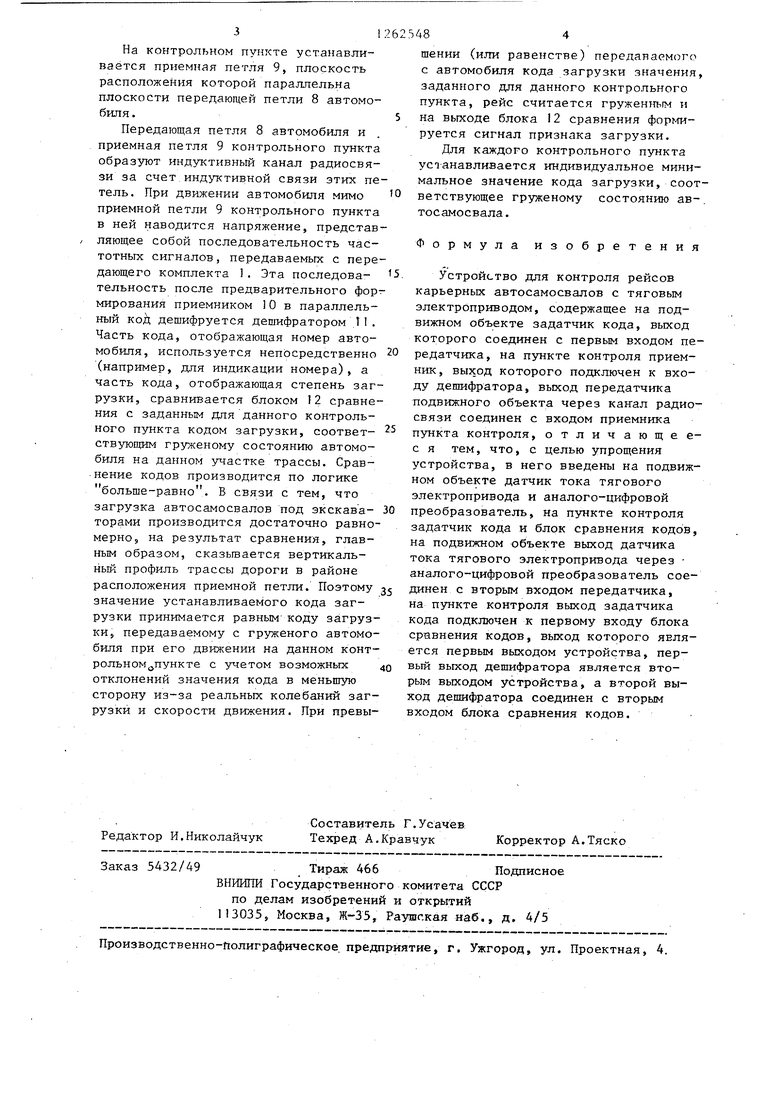
На чертеже представлена структурная схема предлагаемого устройства.
На каждом автомобиле устанавливается передающий мобильный, а на контрольном пункте приемный стационарный комплекты 1 и 2 аппаратуры. На подвижном объекта устройство содержит датчик 3 тока тягового электропривода, который через аналого-цифровой преобразователь 4 включен на вход передатчика 5, например кодовых частотных посылок, на вход KOTOpioro также подключен задатчик 6 кода транспортной единицы. Выход передатчика 5 через усилитель 7 мощности соединен с передающей индуктивной петлей 8, входящей в состав канала радиосвязи.
Приемная индуктивная петля 9 канала радиосвязи на пункте контроля индуктивно связана с передающей петлей В и через передатчик 10 с дешифратором 11. Часть информационных выходов дешифратора 11, содержащая код номера автомобиля, поступает на выход приемного комплекта устройства непосредственно, а часть выходов дешифратора 11, содержащая код загрузки, поступает на один из входов блока 12 сравнения кодов, на второй вход которого поступает заданное на данном контрольном пункте минимальное значение кода загрузки с задатчика 13 кода. Выход блока 12 сравнения поступает на выход приемного комплекта в виде признака загрузки проезжающего автомобиля.
Устройство работает следующим образом.
Номер автомобиля задается задатчиком 6. В качестве такого задатчика может использоваться кнопочный регистр, кодовая фишка и т.п. Код номера поступает на информационные входы передатчика 5, на другие входы которого постоянно поступает код с выхода аналого-цифрового преобразователя
4, являющийся цифровым выражением величины статического тока тягового двигателя (мотор - колеса). Величина этого тока, измеряемая датчиком 3,
определяется нагрузкой на автомобиль и зависит от степени загрузки кузова, крутизны подъема в данном месте трассы и скорости движения. Практически, скорость движения автомобиля при вьгоозке горной массы поддерживается максимально возможной и для каждого участка трассы от ходки к ходке меняется незначительно. Методы и средства для измерения статической нагрузки электродвигателей известны. Датчик 3 реализуется простой электрической схемой. Преобразователь 4 может быть вьтолнен по любой из известных схем преобразователей типа.
ток - код.
Учитьшая, что для контроля рейсов необходимо фиксировать только наличие загрузки без точного измерения ее величины, и принимая во внимание, что настоящим способом невозможно точное измерение веса перевозимого груза, требования к разрядности преобразователя 4 могут быть не жесткими. Достаточно три - четыре бинарных разряда, что обеспечивает 8-16 кодовых значений величины статического тока. Код загрузки совместно с заданным для данного автомобиля кодом
5 номера образует передаваемое с автомобиля кодовое сообщение. Это сообщение прк помощи передатчика 5 преобразуется в последовательность кодовых частотных импульсов, запитываю0 щих через усилитель 7 мощности передающую петлю 8, установленную на автомобиле. Таким образом, с автомобиля непрерьшно передается циклический код, часть которого содержит ин5 формацию о номере автомобиля, а
часть - информацию о нагрузке на двигатель автомобиля. Несущая частота излучаемых сигналов выбирается в пределах 10-50 кГц. При потреблении то0 ка от электрической цепи автосамосвала величиной порядка I А обеспечивается мощность излучения, достаточная .для приема этих сигналов на расстоянии до 10 м от передающей петли. Ко5 довая манипуляция несущей частоты может осуществляться известными методами как по амплитуде, так и по частоте сигнала.
На контрольном пункте устанавливается приемная петля 9, плоскость расположения которой параллельна плоскости передающей петли 8 автомобиля.
Передающая петля 8 автомобиля и приемная петля 9 контрольного пункта образуют индуктивный канал радиосвязи за счет индуктивной связи этих пе тель. При движении автомобиля мимо приемной петли 9 контрольного пункта в ней наводится напряжение, представ ляющее собой последовательность частотных сигналов, передаваемых с передающего комплекта 1. Эта последовательность после предварительного формирования приемником 10 в параллельный Koh дешифруется дешифратором Т1. Часть кода, отображающая номер автомобиля, используется непосредственно (например, для индикации номера), а часть кода, отображающая степень загрузки, сравнивается блоком 12 сравнения с заданным для данного контрольного пункта кодом загрузки, соответствующим груженому состоянию автомобиля на данном участке трассы. Сравнение кодов производится по логике больше-равно. В связи с тем, что загрузка автосамосвалов под экскаваторами производится достаточно равномерно, на результат сравнения, главным образом, сказьгоается вертикальный профиль трассы дороги в районе расположения приемной петли. Поэтому значение устанавливаемого кода загрузки принимается равным коду загрузки, передаваемому с груженого автомобиля при его движении на данном контрольном пункте с -учетом возможных отклонений значения кода в меньшую сторону из-за реальных колебаний загрузки и скорости движения. При превы625484
шении (или равенстве) передаваемого с автомобиля кода загрузки значения, заданного для данного контрольного пункта, рейс считается груженттым и 5 на выходе блока 12 сравнения формируется сигнал признака загрузки.
Для каждого контрольного пункта усаанавливается индивидуальное минимальное значение кода загрузки, соответствующее гр-уженому состоянию ав-. тосамосвала.
Формула изобретения
. Устройство для контроля рейсов карьерных автосамосвалов с тяговым электроприводом, содержащее на подвижном объекте задатчик кода, выход которого соединен с первым входом передатчика, на пункте контроля приемник, выход которого подключен к входу дешифратора, выход передатчика подвижного объекта через канал радиосвязи соединен с входом приемника пункта контроля, отличающеес я тем, что, с делью упрощения устройства, в него введены на подвижном объекте датчик тока тягового электропривода и аналого-цифровой
преобразователь, на пункте контроля задатчик кода и блок сравнения кодов, на подвижном объекте выход датчика тока тягового электропривода через аналого-цифровой преобразователь соединен с вторым входом передатчика, на пункте контроля выход задатчика кода подключен к первому входу блока сравнения кодов, выход которого является первым выходом устройства, первый выход дешифратора является вторым выходом устройства, а второй выход дешифратора соединен с вторым входом блока сравнения кодов.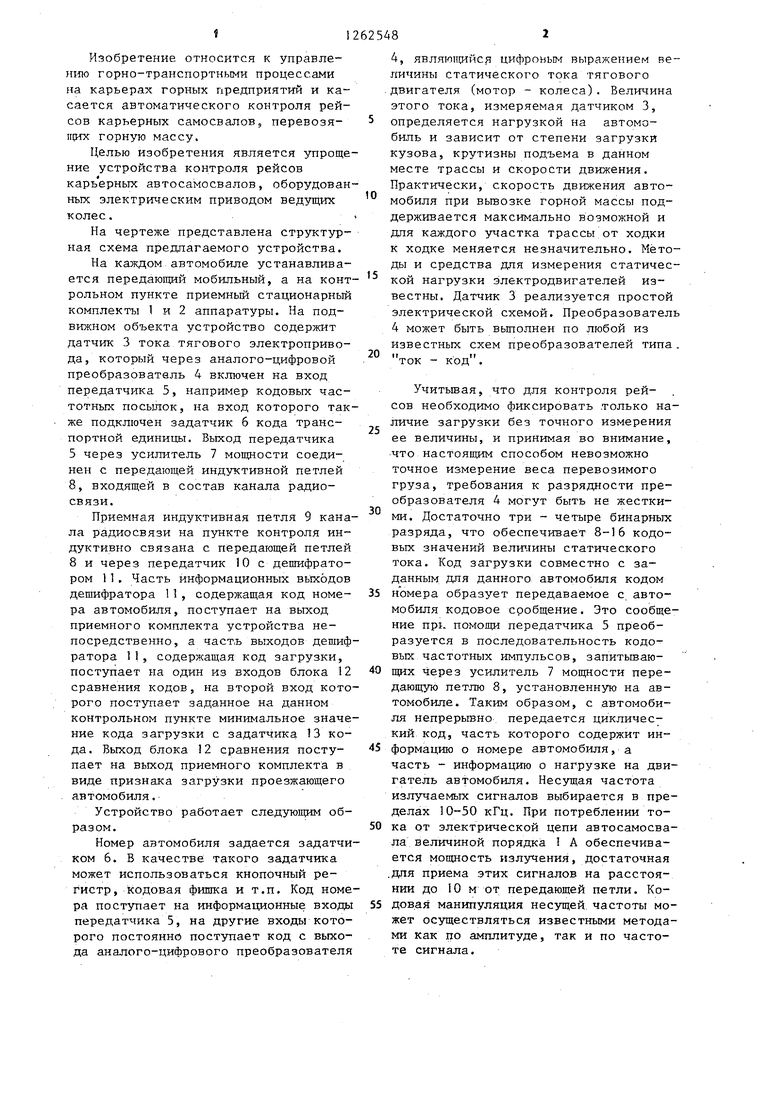
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2000 |
|
RU2184992C1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2234735C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2233006C2 |
| РАДИОРЕПЕРНАЯ СИСТЕМА ДИАГНОСТИКИ СОСТОЯНИЯ ГОРНОТЕХНИЧЕСКИХ ОБЪЕКТОВ | 1992 |
|
RU2049231C1 |
| Устройство для контроля и учета работы карьерного автотранспорта | 1975 |
|
SU516075A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для учета рейсов автосамосвалов | 1983 |
|
SU1123041A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
Изобретение относится к управлению горно-транспортными процессами на карьерах горных предприятий. Устройство является простым и не требует больших аппаратурных затрат. Сигнал о загрузке самосвала при его прохождении в зоне пункта контроля формируется датчиком тока тягового электродвигателя. Преобразуясь в аналогоцифровом преобразователе в код, сигнал с датчика поступает на передатчик. Сигналы передатчика через канал радиосвязи передаются на приемник, находящийся на пункте контроля. Здесь принятый код дешифрируется дешифратором и разделяется на две части. Одна часть соответствует коду номера самосвала, а другая отражает признак загрузки. Блок сравнения кодов осу- ) ществляет формирование этого призна(Л ка по результату сравнения с уставкой, заложенной в задатчике кода. 1 ил.
| Устройство для учета перевезенного груза | 1974 |
|
SU498636A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для контроля рейсовТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU830447A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
