Изобретение относится к области гидроакустики и может быть использовано для обнаружения подводных объектов в условиях, когда применение традиционных пассивных и активных гидроакустических способов затруднено или невозможно из-за наличия в охраняемой акватории высокоинтенсивных морских шумов, например во время шторма или атмосферных осадков.
Известен пассивный способ обнаружения подводного объекта (ПО) в охраняемой морской акватории, заключающийся в регистрации гидроакустическим приемником первичного гидроакустического поля ПО [1].
Недостатком известного пассивного способа обнаружения является ограниченность его применения случаем, когда соотношение сигнал/помеха больше единицы.
Известен активный способ обнаружения ПО на охраняемой акватории [2], принятый за прототип.
Активный способ обнаружения подводного объекта на охраняемой морской акватории заключается в приеме акустических волн гидроакустическими приемниками, по выходным сигналам которых обнаруживают подводный объект, определяют его координаты и технические и кинематические параметры.
Недостатком прототипа является отсутствие скрытности средств обнаружения ПО, а также ограниченность его применения при малом соотношении сигнал/шум, например, во время шторма или атмосферных осадков.
Данное соотношение в современных условиях может быть малым из-за специальных антиотражающих покрытий ПО с одной стороны и возрастанием морских шумов, например, во время шторма - с другой.
Техническим эффектом, получаемым от внедрения изобретения, является устранение недостатков, т. е. обеспечение скрытности средств обнаружения ПО и расширение области применения для малого соотношения сигнал/шум, например, во время шторма или атмосферных осадков.
Данный технический результат достигают за счет того, что в известном способе обнаружения ПО на охраняемой морской акватории, заключающемся в приеме акустических волн гидроакустическими приемниками, по выходным сигналам которых обнаруживают подводный объект, определяют его координаты и технические и кинематические параметры, в качестве акустических волн используют естественное гидроакустическое шумовое излучение поверхности охраняемой морской акватории во время шторма или атмосферных осадков, при этом гидроакустические приемники выполняют с вертикальными характеристиками направленности, располагают под предполагаемым курсом следования ПО.
В частном случае гидроакустические приемники выполняют с возможностью их пространственного перемещения в горизонтальной плоскости, например, с помощью вспомогательного плавсредства.
Как показали многолетние исследования океанологов и гидроакустиков [3], в том числе и авторов данного способа:
- Шумы взволнованной поверхности моря являются преобладающими в общей сумме морских шумов в океане. Спектр шума простирается от долей герца до десятков килогерц и подчиняется закону 1/fα, где f - частота спектральной составляющей; α- коэффициент (α≅1).
- Шумы морской поверхности распространяются в воде вертикально вниз ко дну [3].
- Корпус ПО влияет на уровни и частотные характеристики спектра естественного гидроакустического шумового излучения поверхности морской среды, особенно в той части спектра диапазона длин волн - λ, длина которых сравнима или меньше геометрических размеров корпуса ПО.
- Наибольшей интенсивности шумы поверхности моря достигают во время шторма или атмосферных осадков.
Перечисленные выше постулаты лежат в основе рассматриваемого способа обнаружения ПО в охраняемой морской акватории.
Изобретение поясняется чертежами.
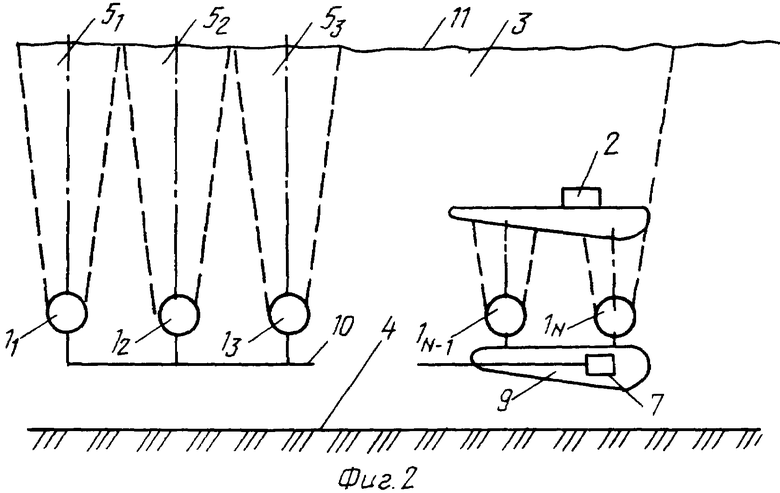
На фиг. 1 представлена структурная схема системы обнаружения ПО стационарного базирования для реализации основного пункта способа; на фиг. 2 - структурная схема передвижной системы обнаружения для реализации дополнительных пунктов способа.
Структурная схема системы обнаружения ПО стационарного базирования (фиг. 1) включает в себя гидроакустические приемники 11, 12,...1N, расположенные под предполагаемым курсом следования подводного объекта 2 (ПО2), на охраняемой морской акватории 3.
Гидроакустические приемники 1 могут располагать у морского дна 4 (или на морском дне 4), закрепляя их в нужном месте с помощью якорных устройств (на чертежах не показаны).
Каждый из гидроакустических приемников 11, 12, ...1N выполнен с вертикально ориентированной характеристикой 51, 52,...5N направленности и соединен кабелем 6 с блоками 7 питания, обработки и регистрации, расположенными на берегу 8.
В варианте с перемещаемыми гидроакустическими приемниками (фиг. 2) последние располагаются на корпусе вспомогательного подводного плавсредства 9 или закрепляются на гидроакустической косе 10.
Блоки 7 питания, обработки и регистрации в данном варианте реализации способа располагаются на вспомогательном плавсредстве 9.
Способ реализуется следующим образом.
Гидроакустические приемники 1 (фиг. 1) во время шторма или атмосферных осадков принимают морской шум водной поверхности 11 охраняемой акватории 3. При этом в блоке 7 записывается средний уровень шумов морской поверхности 11 с каждого из приемников 1. Чем больше взволнована морская водная поверхность 11 природными силами (штормовым ветром, дождем, турбулентным течением и т.п. ), тем больше уровень сигнала, регистрируемого каждым из гидроакустических приемников 1, выходной сигнал с которых может быть выведен и на устройство субъективного прослушивания сигнала.
При появлении в охраняемой морской акватории 3 подводного объекта 2, происходит экранирование гидроакустического шума водной поверхности 11 морской акватории 3 для гидроакустических приемников 1N-1, 1N, расположенных под подводным объектом 2. При этом регистрируется изменение выходного сигнала в блоках 7, в том числе и в устройстве индивидуального прослушивания.
Поскольку шумовые сигналы регистрируются с каждого гидроакустического приемника 11, 12,...1N, то по уменьшению и изменению тона сигнала нетрудно определить координаты расположения подводного объекта 2.
При реализации способа с подвижными гидроакустическими приемниками (фиг. 2) гидроакустическую косу 10 перемещают в различные области охраняемой акватории 3 до момента появления сигнала с одного или группы гидроакустических приемников 1.
При обработке выходных сигналов гидроакустических приемников на компьютере (бортовом или береговом) получают информацию о скорости, курсе и размерах подводного объекта 2. Для этого проводят частотный анализ выходных сигналов с гидроакустических приемников и по разнице между уровнями частотных составляющих с различных гидроакустических приемников определяют перечисленные выше параметры.
Поскольку шумовое излучение водной поверхности 11 происходит повсюду и всегда, то обнаружение подводного объекта 2 данным способом ведется скрытно. При этом, если уровень собственного шума сравним или выше уровня морских шумов, появляется возможность оценки уровня шумоизлучения подводного объекта 2 путем сравнения последнего с регистрируемым уровнем морских шумов.
Нетрудно заметить, что чем выше уровень морских шумов (во время шторма или непогоды), тем эффективнее применение данного способа по сравнению с прототипом, поскольку в первом случае соотношение сигнал/шум увеличивается, а во-втором - уменьшается.
Источники информации
1. P. Дж. Урик. Основы гидроакустики. Из-во "Судостроение" Л., 1978, стр. 18, 19.
2. Там же, стр. 26, 27, рис. 1.4 - прототип.
3. Патент 2111509 РФ, кл. G 01 S 15/96, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| СПОСОБ ГРАДУИРОВКИ ГИДРОАКУСТИЧЕСКОГО ИЗМЕРИТЕЛЬНОГО ТРАКТА РАБОЧЕГО СРЕДСТВА ИЗМЕРЕНИЙ | 1998 |
|
RU2141743C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ПЛАВСРЕДСТВА | 1998 |
|
RU2141740C1 |
| СПОСОБ СНИЖЕНИЯ ИНТЕНСИВНОСТИ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ПЛАВСРЕДСТВА | 2001 |
|
RU2195690C2 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения подводных объектов в условиях, когда использование традиционных пассивных и активных способов обнаружения затруднено или невозможно из-за наличия высокого уровня морских шумов. Сущность изобретения заключается в том, что на морском дне охраняемой морской акватории располагают серию гидроакустических приемников, характеристики направленности которых ориентированы на водную поверхность акватории. Поскольку гидроакустическое шумовое излучение водной поверхности охраняемой морской акватории направлено вертикально вниз, гидроакустические приемники будут иметь на выходе постоянный уровень шумового сигнала. Достигаемым техническим результатом является то, что при появлении подводного объекта в охраняемой акватории некоторые из приемников будут экранированы корпусом объекта, что позволяет обнаружить последний по изменению уровня шумового сигнала водной поверхности на выходе соответствующих приемников. Особенно эффективно применение способа во время шторма и(или) атмосферных осадков на охраняемой морской акватории. 1 з.п. ф-лы, 2 ил.
| Р | |||
| ДЖ | |||
| УРИК | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1978, с.26, 27, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ КОСЯКОВ | 1994 |
|
RU2111509C1 |
| US 4879697, 07.11.1989 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |

