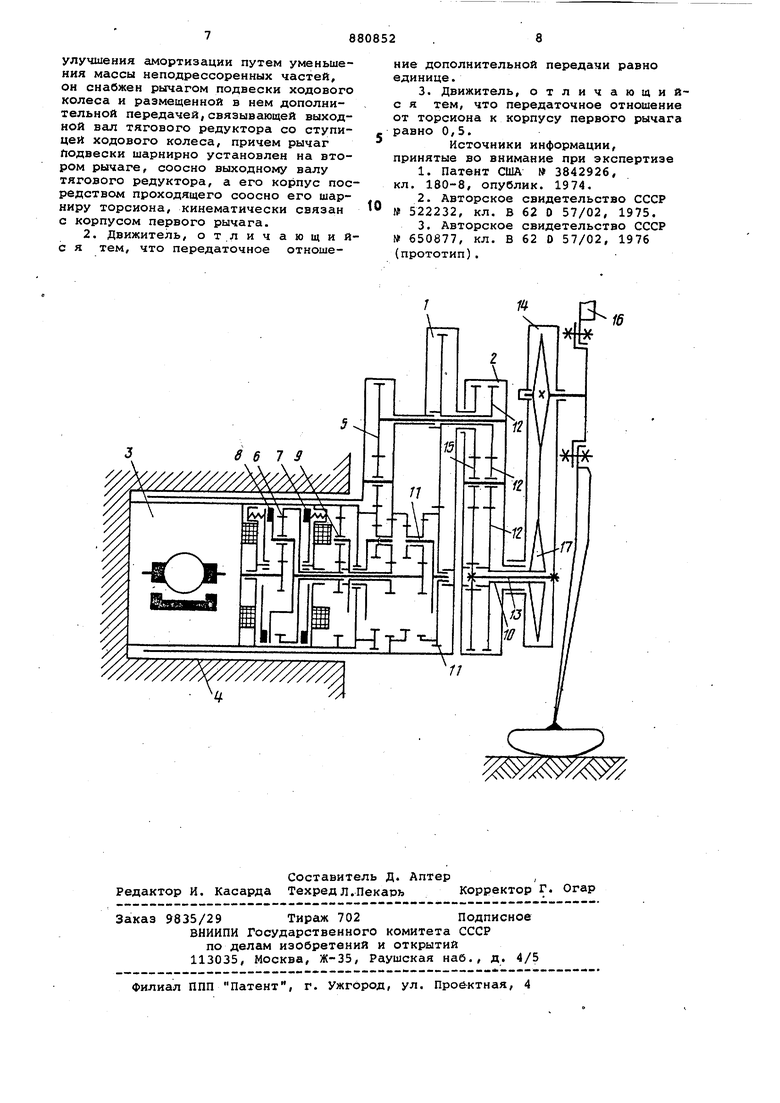
Изобретение ртносится к движителям транспортных средств высокой проходимости, в частности, к колесно шагающим движителям. Известен колесно-и-агающий движитель, содержащий два шарнирно сочлененных рычага, первый из которых сво им свободным концом поворотно соединен с корпусом транспортного средства, а второй - со ступицей колеса приводы вращения ходового колеса и рычагов и кюханизмы их блокировки. Привод вращения колеса выполнен в виде ги дромотора,разг ющенно1о во вт ром рычаге,а привод вращения рычагов выполнен в виде двух гидроцилиндров, связывающих первый рычаг с корпусом и со вторым рычагом. Блокирующий механизм разме щен в приводных злементах. такой движитель обеспечивает тран портному средству высокую проходимость Г Однако его применение ограничивае ся сложностью конструкции и трудностью управления машиной из-за бол шого количества исполнительных прив дов, установленных раздельно для вр щения колеса и вращения рычагов. Известен также колесно-шаггиоций . движитель. который содержит механизм шагания,включающий два шарнирно сочлененных рычага, первый из которых шарнирно связан с корпусом транспортного средства, а второй - со ступицей колеса одним тяговым двигателем, размещенным в первом рычаге, тяговым редуктором, размещенным в обоих рычагах и блокирующим механизмом,при этом последний состоит из червячной пары, снабженной командным электродвигателем, червячная шестерня связана со ступицей первого 1Х:1чага, а червяк - с корпусом. Первый и второй рычаги соединены редуктором, встроенным в первом рычаге и имеющим передаточное отношение от второго рычага к корпусу относительно первого рычага равное двум. Колесный режим движителя осуществляется включением только тягового привода, а колесношагакяций - включением тягового и командного электродвигателей, что позволяет существенно упростить управление транспортной машиной 2. Недостатком такого движителя является наличие дифференциальной связи колеса и рычагов на этапе выноса корпуса транспортного средства, что может привести к откату колеса и, таким образом, к потере подвижности ма шины. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является колесно-шагакядий движитель, который состоит из двух шарнирно сочлененных рычагов механизма шагания, первый из которых своим одним концом.соединен с корпусом транспортного средства, с возмож ностью поворота вокруг горизонталь(НОй оси, а другой - связан с ходовым колесом тягового редуктора колеса, размещенного в обоих рычагах, двигателя и блокирующего механизма,осуществляющего переход от колесного ре жима .к колесно-шагающему,причем в этой конструкции движитель снабжен редуктором, расположенным между блокирующим механизмом и тяговым редуктором, блокирующий механизм выполнен в виде трехзвенного планетарного мех низма, солнечная шестерня которого соединена с валом двигателя, водило со входным валом тягового редуктора, а эпицикл, посредством указанного ре дуктора - с первым рычагом, при этом упомянутые водило и эпицикл снабжены управляемыми тормозами, неповоротно связанными с корпусом транспортной машины. Колесный режим работы осуществляется замыканием тормоза эпицикла блокирующего механизма, а этап переноса корпуса колесно-шагаюшего режимя1 реализуется при торможении водила. Дифференциальная связь колеса и рычагов на этапе переноса корпу са в этом движителе исключается, что принципиально важно для повышения про ходимости машины. Последнее подтверж дено испытаниями ходового макета, на котором внедрена. конструкция движителя З . В то же время неподрессоренные массы оказались существенно завышенными в сравнении с колесным движителем вследствие того, что такая конструкция предусматривает только подрессорив ание шагающего движителя в целом, исключая возможность амортизации отдельно взятого р одового колеса. Цель изобретения - улучшение амортизации путем уменьшения массы неподрессоренных масс. Поставленная цель достигается тем что в колесно-шагающем движителе,содержащем два шарнирно сочлененных рычагамеханизма шагания, первый из которых своим свободным концом поворотно соединен с корпусом транспортного средства, а другой - связан с ходовым колесом, тяговый редуктор колеса размещенный в обоих рычагах, двигатель и блокирующий механизм, осуществляющий переход от колесного режима к колесно-шагающему, он снабжен рычагом подвески ходового колеса и размещенной в нем дополнительной передачей , связывающей выходной вал тягового редуктора со ступицей ходового колеса, причем рычаг подвески шарнирно установлен на втором рычаге соосно выходному валу тягового редуктора, а его корпус посредством проходящего соосно его шарниру торсиона, кинематически связан с корпусом первого рычага. Кроме того передаточное отношение дополнительной передачи равно единице. Передаточное отношение от торсиона к корпусу первого рычага равно О, 5. На чертеже приведена кинематическая схема движителя. Движитель состоит из двух равноплечих шарнирно сочлененных рычагов 1 и 2. Первый рычаг 1 свободным концом шарнирно установлен на статоре тягового двигателя 3, жестко соединенного с корпусом 4 транспортного средства. Второй рычаг 2 связан с корпусом с помощью редуктора 5 механизма шагания, встроенного внутри первого рычага. Передаточное отношение от второго рычага к корпусу в от-носительном движении равно двум. Выходной вал тягового двигателя соединен через блокирующий механизм б, снабженный управляющими тормозами 7 и 8, с первым рычагом через редуктор 9 и с выходным валом 10 через тяговый редуктор, встроенный внутри первого и в-торого рычагов. Передаточное отношение от выходного вала тягового редуктора 11, встроенного в первом рычаге, к выходному валу 10 тягового редуктора 12, встроенного во втором рычаге равно двум. Во втором рычаге механизма шагания соосно выходному валу 10 тягового редуктора установлен на опорах торсион 13, одним концом заделанный в рычаге 14 подвески, а вторым - кинематически связанный с первым рычагом с помощью редуктора 15. Передаточное отношение от торсиона к первому рычагу равно 0,5. Рычаг 14 подвески установлен одним концом шарнирно на втором рычаге механизма шагания соосно выходному валу 10 тягового редуктора, а на другом конце этого рычага, установленного на опорах, установлено ходовое колесо 16, кинематически связанное с выходным валом 10 с помощью дополнительной, например, цепной передачей 17, размещенной во внутренней полости рычага подвески и имеющей передаточное отношение равное единице. Работа колесно-шагающего движителя осуществляется следующим образом. При включении тормоза 7 и выключении тормоза 8 вся мощность тягового двигателя 3 через планетарный ряд блокирующего механизма 6, тяговые редукторы 11 и 12 и дополнительную передачу 17 передается колесу.Движитель работает в колесном режиме. Рычаги 1 и 2 механизма шагания неподвижны. Поскольку передаточное отношение дополнительной передачи 17, например цепной, соединяющий выходной вал 10 тягового редуктора и колесо 16, выбрано равным единице, то и при качании рычага 14 подвески обеспечивается постоянство частоты вращения выходного вала 10 тягового редуктора независимо от переменной по величине и направлению частоты колебаний рычага 14 подвески. Это видно из уравнения Виллиса, записанного для дополнительной передачи 17 относительно связанного с ней ралчага 14 подвески ,-uJpr, .
A.n.
и иliP.n.
„ ,. i „.ч шр „ (Ид n),
где ии , - частоты вращения соответственно входного и выходного звеньев допблнительной передачи 17,связанных соответственно с выходным валом 10 тягового редуктора и колесом 16; ujp.n. - частота колебаний рычага
14 подвески;
1 п передаточное отношение дополнительной передачи в относительном движении. Независимость iwj, от wp.f, может быть обеспечена только при д q 1. Это обеспечивает нормальное движение KO-I леса при всех режимгш работы движителя. При этом реактивный момент на рычаге 14 подвески от дополнительной передачи, являющийся дополнительной нагрузкой на торсион 13, равен по величине только моменту потерь в этой передаче, что позволяет выполнить конструкцию подвески без специального устройства разгрузки торсиона 13 от указанного реактивного момента. Упругий момент торсиона 13, возникающий при качании рычага 14 подвески, передается на корпус 4 транспортного средства через редукторы 15 и 5.
Для выноса колеса при работе движителя в колесно-шагающем режиме выключаются оба тормоза 7 и 8. При этом между рычагом 1 и колесом 16 устанавливается дифференциальная связь,так что могут вращаться и колесо и рычаги. Колесо перемещается как ведущее от крутящего момента, передаваемого от двигателя через тяговый редуктор и дополнительную передачу, и толкаемое от силы, пропорциональной ррутящему моменту на первом рычаге,передаваемому от двигателя через редуктор 9. Причем, чем больше сила сопротивления качению, тем больше момент на колесе и тем больше толканмдая сила. Вращение рычагов механизма шагания не вызывает вращения торсиона 13 благодаря тому, что передаточное отношение от торсиона к первому выбрано равным 0,5. Это видно из
уравнения Виллиса, ваписанного относительно второго рычага:
i±Ci 4 .
lU -lUiJ М
-lUiJ
где - частота вращения торсиона; частоты вращения соответ ственно первого и второго рычагов; ij передаточное отношение от торсиона к первому рычагу относительно второго рялчага.
Поскольку, благодаря наличию редуктора 5 механизма шагания, выполняется условие jjei - Ш-, , то из уравнения Виллиса видно, что при 1-г 0,5, иот 0.
Упругий момент торсиона передается на корпус благодаря тем же связям которые были указаны при рассмотрении; колесного режима работы.
ДЛЯпереноса корпуса при работе движителя в колесно-шагающем режиме тормоз 7 остается выключенным, а тормоз 8 - включен. Мощность двигателяпередается через планетарный ряд блокирующего механизма и редуктор 9 на рычаги механизма шагания, что вызывает перемещение корпуса 4 транспортного средства, так как его колеса 16 при данных кинематических связях тягового редуктора оказываются неподвижными. Подвеска работает аналогично.
Применение предлагаемого колесношаганяцего движителя резко уменьшает неподрессоренные массы, так как в этом случае к ним относятся только ходовое колесо со своими опорами и шестерней дополнительной передачи 17 встроенной в рычаге подвески, а следовательно, улучшает амортизацию,упрощает подвод энергии к тяговому двигателю, статор которого связан непосредственно с корпусом транспортного сведства, исключает возможность заклинивания рычагов и колеса породой, что, как показывают испытания ходового макета, оказывается возможным при расположении рычагов механизма шагания во внутренней полости колеса и при длине рычагов, соизмеримых с радиусом ходового колеса.
Формула изобретения
1.Колесно-шагающий движитель,содержащий два шарнирно сочлененных рычага механизма шагания, первый из. которых своим одним концом соединен с корпусом транспортного средс ва, с возможностью поворота вокруг горизонтальной оси, а другой - связан с ходовым колесом, тяговый редуктор колеса, размещенный в обоих рычагах, двигатель и блокирующий механизм,осуществлякяцйй переход от колесного режима к колесно-шагающему, отличающийся тем, что, с цель
улучшения амортизации путем уменьшения массы неподрессоренных частей, он снабжен рычагом подвески ходового колеса и размещенной в нем дополнительной передачей,связывающей выходной вал тягового редуктора со ступицеИ ходового колеса, причем рычаг подвески шарнирно установлен на втором рычаге, соосно выходному валу тягового редуктора, а его корпус посредством проходящего соосно его шарниру торсиона, кинематически связан с корпусом первого рычага.
2. Движитель, отличающийс я тем, что передаточное отношение дополнительной передачи равно единице.
3. Движитель, отличающийс я тем, что передаточное отношение от торсиона к корпусу первого рычага равно 0,5.
Источники информации, принятые во внимание при экспертизе
1.Патент США 3842926, кл. 180-8, опублик. 1974.
2.Авторское свидетельство СССР № 522232, кл. В 62 О 57/02, 1975.
3.Авторское свидетельство СССР 650877, кл. В 62 О 57/02, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1976 |
|
SU569475A1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Транспортное средство | 1979 |
|
SU880853A1 |
