Предлагаемое изобретение касается косвенного измерения расстояния между выбранными точками отражающей поверхности с использованием электромагнитных волн. Оно может использоваться в машиностроении, строительстве, горнопроходческом деле, авиации, а также в системах контроля при стендовых и лабораторных испытаниях, когда линейные измерения затруднены, а угловые доступны.
Известен способ определения расстояния, включающий излучение сигналов с объекта перпендикулярно отражающей поверхности, прием отраженных сигналов на объекте, измерение угла между направлениями прихода отраженных сигналов и определение расстояния по соотношению направлений прихода сигналов и известному расстоянию между точками излучения сигналов [1] .
С помощью данного способа можно получить достоверные результаты косвенного измерения расстояния между двумя точками отражающей поверхности, когда пути, пройденные отраженными сигналами от точек их отражения до точек приема на объекте, будут равными. Если это условие не соблюдается, то возникает методическая погрешность измерения. Помимо этого в данном способе диапазон измеряемых расстояний между двумя точками отражающей поверхности ограничивается линейным расстоянием между точками излучения сигналов.
По технической сущности наиболее близким к предлагаемому является способ определения расстояния, включающий излучение сигналов из двух точек объекта по направлению к отражающей поверхности, прием отраженных сигналов на объекте и определение расстояния по соотношению направлений излучения и приема сигналов и известному расстоянию между точками излучения и приема, причем в качестве излучаемых сигналов используют сигналы видимого оптического диапазона, оси излучения которых лежат в плоскости, образованной прямой, соединяющей точки излучения, и прямой, проходящей через точку начала отсчета дальности на объекте и выбранную точку отражающей поверхности, изменяют направления осей излучения в каждой из точек излучения до совмещения их в выбранной точке отражающей поверхности, фиксируют углы наклона осей излучения к прямой, соединяющей точки излучения сигналов, а затем определяют дальность R до указанной точки отражающей поверхности при помощи соотношения
где Lj - длина отрезка прямой, соединяющей j-ю точку излучения сигнала на объекте (j= 1,2) с точкой приема отраженного сигнала;
kj - углы наклона осей излучения сигналов к указанному отрезку;
m - направление измерения расстояния [2] .
С помощью данного способа можно получить достоверные результаты косвенного измерения расстояния между двумя точками отражающей поверхности, когда прямые, проходящие через эти точки, одновременно принадлежат плоскости излучения и приема сигналов. Такой случай возможен преимущественно при статических измерениях или, например, при горизонтальном движении динамического объекта, когда на нем отрезок, соединяющий точки излучения и приема сигналов, будет параллельным отрезку прямой, соединяющему выбранные точки отражающей поверхности, и оба эти отрезка будут одновременно находиться в плоскости, образованной направлениями излучения и приема сигналов. При несоблюдении таких условий возникает методическая погрешность, тем большая, чем большим будет угол между плоскостями, образованными компланарными осями излучения и приема сигналов от каждой точки отражающей поверхности.
Цель изобретения - повышение точности измерения расстояния между выбранными точками отражающей поверхности.
Цель достигается тем, что в способе определения расстояния, включающем излучение с объекта сигналов по направлениям на выбранные точки отражающей поверхности, прием отраженных сигналов на объекте и определение расстояния между выбранными точками по соотношению направлений излучения и приема сигналов и известному расстоянию между точками излучения и приема, последовательно для каждой выбранной пары точек отражающей поверхности из общего их числа измеряют угол расхождения осей излучения сигнала на каждую из точек выбранной пары, располагают точки приема отраженных сигналов на прямой, проходящей через точку излучения, и в каждой из них изменяют направление оси приема отраженных сигналов в плоскости, образованной указанной прямой и соответствующей осью излучения сигнала, до совмещения его с направлением прихода отраженного сигнала от участка поверхности в месте расположения точки, принадлежащей к выбранной паре и расположенной в этой плоскости, и затем при совмещении этих направлений фиксируют углы наклона осей излучения и приема сигналов к указанной прямой и определяют расстояние Rij между выбранными точками отражающей поверхности при помощи соотношения
где
Vij= [coski-cos(2li+ki)] [coskj-cos(2lj+kj)] ,
i, j= 1,2, . . . , n;
Lj - длина отрезка прямой, соединяющего точку А излучения сигнала с j-й точкой приема, j= 1,2, . . . , n;
kj - угол наклона оси излучения сигнала из точки А объекта в направлении на выбранную j-ю точку отражающей поверхности к указанному отрезку прямой, j= 1,2, . . . , n;
lj - угол наклона оси приема отраженного сигнала в точке Pj объекта к указанному отрезком прямой, j= 1,2, . . . , n;
mij - угол расхождения осей излучения сигналов по направлениям на i-ю и j-ю точки отражающей поверхности, i, j= 1,2, . . . , n;
n - общее число точек отражающей поверхности.
Способ базируется на следующих теоретических предпосылках, включающих постановку задачи определения расстояния между выбранными точками отражающей поверхности, построение геометрической модели ее решения, решение задачи, построение общей схемы метода измерения по результатам решения и модификаций этой схемы, позволяющих повысить точность и оперативность измерений в оговоренных условиях задачи.
10. Рассмотрим постановку задачи определения (косвенного измерения) расстояния между выбранными точками Oi и Оj отражающей поверхности S, где i, j= 1,2, . . . , n, i≠j, n - общее число точек поверхности S (фиг. 1).
Оговорим условия W задачи:
W1 - измерения выполняются на конечном интервале времени;
W2 - объект, на котором выполняются измерения, является динамическим и протяженным. Это значит, что текущие координаты точки излучения сигналов и координаты точек приема отраженных сигналов изменяются во времени;
W3 - расстояние Rij между точками Oi и Оj определяется косвенным методом по измерениям некоторой совокупности линейных Li, Lj и угловых ki, kj, mij величин с использованием известной зависимости
Rij = Rij(Li, Lj, ki, kj, mij), i, j= 1,2, . . . , n; (1)
W4 - измеряемые на объекте величины mij характеризуют направления излучения сигнала на точки Oi и Оj, величины ki, kj - направления приема переизлученной электромагнитной энергии, a Li, Lj - взаимное расположение точек излучения и приема сигналов.
Перейдем к формулировке задачи.
1. Пусть из фиксированной точки А протяженного объекта Q излучают пучки сигналов (например, световых, звуковых или ультразвуковых) по направлениям на фиксированные точки Oi и Оj поверхности S. И пусть известен угол mij между осями излучения этих сигналов, i, j= 1,2, . . . , n (фиг. 1).
2. Будем считать, что поверхность S состоит из большого числа отражающих граней G. Размеры таких граней примем настолько малыми, что каждая из них способна отражать только один луч, направление которого зависит от ее ориентации относительно осей излучения сигнала. Лучи, отраженные от граней Gi и Gj, расположенных в точках Oi и Оj, составляют углы 2si и 2sj с направлениями излучения, где si= <AOiNi и sj= <AOjNj - углы между соответствующими направлениями осей излучения сигнала и нормалями OiNi и OjNj к соответствующим граням.
3. Пусть отраженные лучи принимают в фиксированных точках Рi и Pj объекта Q. Для этого приемные устройства сигналов размещают в этих точках и изменяют направления осей приема каждого из них в плоскостях, образованных прямыми APi, AOi и APj, AOj, соответственно, до совмещения их с направлениями прихода отраженных сигналов от соответствующих граней Gi и Gj, расположенных в точках Oi и Оj. Лучи, приходящие в точки Pi и Pj от граней Gi и Gj, составляют углы 2si и 2sj с направлениями излучения сигналов. Без потери общности можно располагать точки приема сигналов и на одной прямой, проходящей через точку А, или совмещать все точки приема в одной, размещая в ней приемник синтезированной апертуры.
4. В моменты приема отраженных сигналов в точках Pi и Рj фиксируют углы ki и kj наклона осей излучения к прямым, проходящим через точки излучения и приема сигналов, и углы li и lj наклона осей приема сигналов к этим прямым. Будем считать известными отрезки прямых APi= Li и АРj= Lj.
Требуется в предположениях 1. . . 4 найти расстояние Rij= OiOj по результатам измерений величин mij, ki, li, Li, выполненных в условиях W, при помощи соотношения (1), где i, j= 1,2, . . . , n, i≠j.
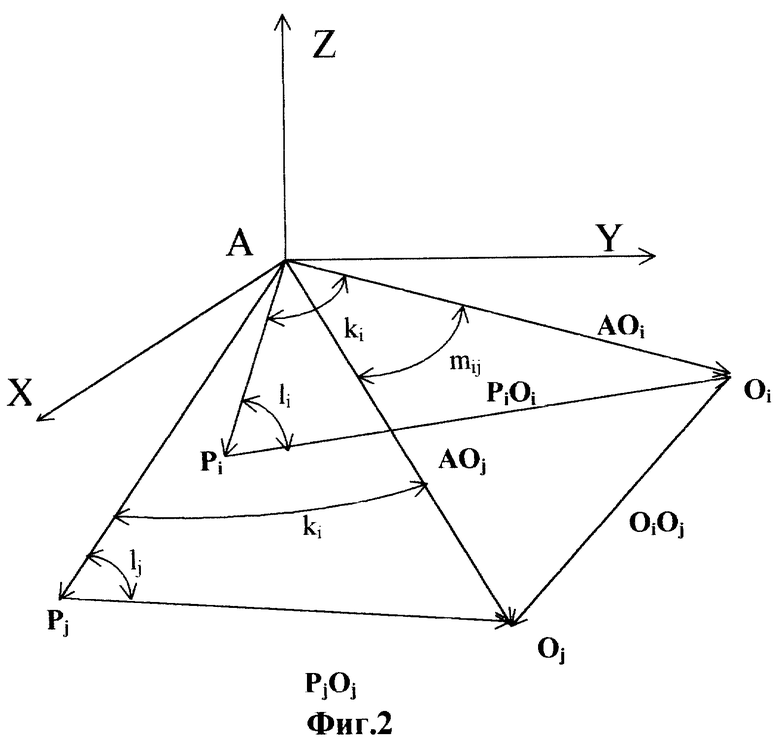
Для решения задачи воспользуемся ее геометрической моделью (фиг. 2).
20. Геометрическая модель.
1. Рассмотрим прямоугольную систему координат AXYZ с началом в точке А (0,0,0) и обозначим в ней точки Рi(хi (P), уi (P), zi (P)) и Рj(хj (P), уj (P), zj (P)) с заранее известными координатами и точки Оi(хi (O), уi (O), zi (O)) и Оj(xj (O), yj (O), zj (O)) с неизвестными координатами.
2. Соединим соответствующие точки направленными отрезками прямых и рассмотрим компланарные векторы АОi{ хi (O), уi (O), zi (O)} , АРi{ xj (P), уj (P), zj (P)} , РiОi{ хi (O)-хi (P), уi (O)-уi (P), zi (O)-zi (P)} и компланарные векторы AOj{ xj (O), уj (O), zj (O)} , APj{ xj (P), уj (P), zj (P)} , PjOj{ xj (O)-xj (P), уj (O)-уj (P), zj (O)-zj (P)} .
3. Будем считать заданными углы, образованные этими векторами: mij= <ОiAОj, ki= <ОiАРi, kj= <OjAPj, li= <АРiOi, lj= <АРjOj.
4. Рассмотрим направленный отрезок OiOj, длина (модуль) которого Rij= /OiOj/ является искомым расстоянием между выбранными точками Oi и Оj отражающей поверхности, зависящим от ki, kj, li, lj, Li= АРi, Lj= APj (фиг. 1 и 2).
30. Решение задачи.
Сформулируем математически задачу определения расстояния между точками Оi и Оj отражающей поверхности по измерениям величин ki, kj, li, lj, Li= APi, Lj= APj, выполненным в условиях W, с применением геометрической модели п. 20.
Задача. Для известных координат точек Pi(хi (P), уi (P), zi (P)) и Рj(хj (P), уj (P), zj (P)) и известных углов mij, ki, kj, li, lj найти Rij= /OiOj/.
Решение задачи находится последовательным использованием известных свойств скалярного и векторно-скалярного произведений векторов модели п. 20.
В результате получаем формулу для определения искомого расстояния
где
Vij= [coski-cos(2li+ki)] [coskj-cos(2lj+kj)] ,
i, j= 1,2, . . . , n;
Lj - длина отрезка прямой, соединяющего точку А излучения сигнала с j-й точкой приема, j= 1,2, . . . , n;
kj - угол наклона оси излучения сигнала из точки А объекта в направлении на выбранную j-ю точку отражающей поверхности к указанному отрезку прямой, j= 1,2, . . . , n;
lj - угол наклона оси приема отраженного сигнала в точке Pj объекта к указанному отрезком прямой, j= 1,2, . . . , n;
mij - угол расхождения осей излучения сигналов по направлениям на i-ю и j-ю точки отражающей поверхности, i, j= 1,2, . . . , n;
n - общее число точек отражающей поверхности.
40. Общая схема метода измерения.
Исходными данными для определения (косвенного измерения) расстояния rij являются условия 1. . . 4 задачи и условия W, при которых выполняются измерения величин mij, ki, kj, li, lj, Li, Lj.
Основываясь на этих исходных данных, рассмотрим возможные схемы проведения измерений.
Для построения отрезков Li и Li на объекте из точки А излучают сигналы в направлении на выбранные точки Oi и Oj отражающей поверхности S, например, световые или звуковые (ультразвуковые). Благодаря способности поверхности S отражать падающую энергию сигналов отраженные сигналы могут быть приняты на объекте в фиксированных точках Pi и Pj, отстоящих от точки А на некоторые фиксированные расстояния Li и Lj. Для этого в точках Pi и Рj размещают приемные устройства и изменяют направления их осей приема в плоскостях, образованных отрезками прямых li, AOi и Lj, AOj, соответственно, до приема в них отраженных сигналов. Затем в моменты приема отраженных сигналов измеряют направления излучения сигналов ki и kj, направления прихода отраженных сигналов li и lj, угол расхождения излучаемых сигналов mij и по полученным данным определяют расстояние Rij, пользуясь соотношением (2).
Описанной схемой исчерпываются возможные вариации метода определения расстояния между выбранными точками отражающей поверхности.
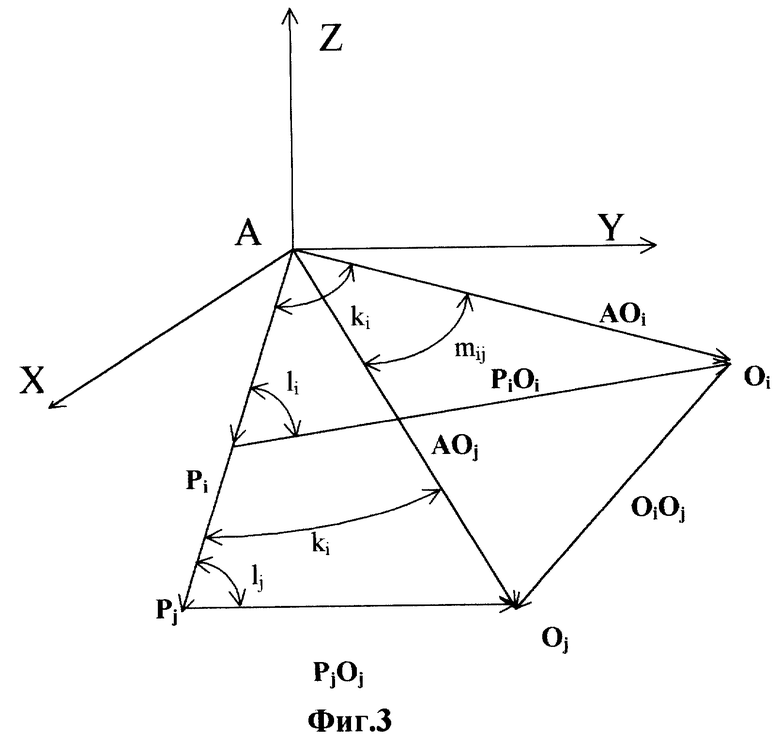
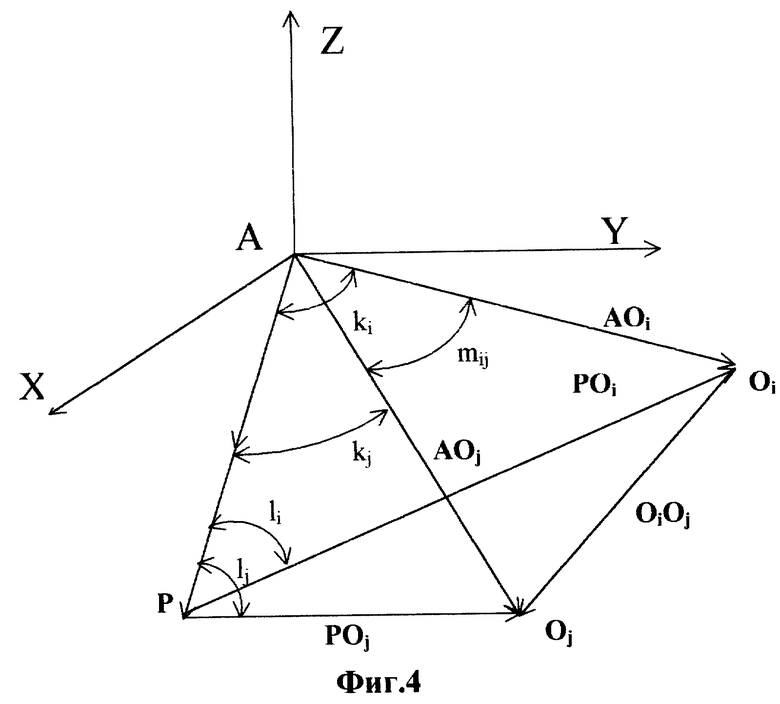
Для повышения оперативности и точности измерения точки приема Pi и Рj можно располагать на одной прямой (фиг. 3), а при использовании приемного устройства с возможностью многолучевого приема - совмещать точки приема в одной точки Р (фиг. 4). Схема на фиг. 4 заслуживает большего предпочтения, поскольку в ней, по сравнению с рассмотренными выше, меньше число измеряемых величин, а следовательно, выше точность определения расстояния Rij, осуществляемое по формуле (2) в предположении Li= Lj= L.
В отличие от известного, предложенному способу (фиг. 1-4) не присуща методическая погрешность в условиях, когда прямые, проходящие через две выбранные точки отражающей поверхности, не принадлежат одновременно плоскости, образуемой осями излучения и приема сигналов относительно каждой из выбранных точек.
Литература
1. Шарагина З. И. и Пицык В. В. Определение дальности движущихся объектов методом визирования. Метрология. 2, 1983, с. 15.
2. Патент Российской Федерации 2072528, Кл. G 01 s 13/00, 1997 - прототип.
3. Патент Великобритании 2041690 А, Кл. G 01 с 3/10, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОТРАЖАЮЩЕЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072528C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| Способ измерения напряженности электромагнитного поля источника излучения при наличии в ближней зоне переизлучающих объектов | 1986 |
|
SU1453338A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЭЛЕМЕНТОВ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2013 |
|
RU2534224C1 |
| СПОСОБ И ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВЕННОГО КОНТРОЛЯ ПРОХОДИМОСТИ ТРУБ | 2011 |
|
RU2552543C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕЩЕСТВА | 1992 |
|
RU2019823C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ТРУДНО РАЗЛИЧИМЫХ ПРЕПЯТСТВИЙ, СПОСОБНЫХ СОЗДАВАТЬ ПОМЕХИ НИЗКОЛЕТЯЩИМ ВЕРТОЛЕТАМ И САМОЛЕТАМ | 2009 |
|
RU2437158C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2258903C2 |
| СПОСОБ ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2546331C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
Изобретение касается косвенного измерения расстояния между выбранными точками отражающей поверхности с использованием электромагнитных волн. Достигаемым техническим результатом является повышение точности измерения расстояния, что достигается тем, что в способе определения расстояния, включающем излучение с объекта сигналов по направлениям на выбранные точки отражающей поверхности, прием отраженных сигналов на объекте и определение расстояния между выбранными точками по соотношению направлений излучения и приема сигналов и известному расстоянию между точками излучения и приема, последовательно для каждой выбранной пары точек отражающей поверхности из общего их числа измеряют угол расхождения осей излучения сигнала на каждую из точек выбранной пары, располагают точки приема отраженных сигналов на прямой, проходящей через точку излучения, и в каждой из них изменяют направление оси приема отраженных сигналов в плоскости, образованной указанной прямой и соответствующей осью излучения сигнала, до совмещения его с направлением прихода отраженного сигнала от участка поверхности в месте расположения точки, принадлежащей к выбранной паре и расположенной в этой плоскости. 4 ил.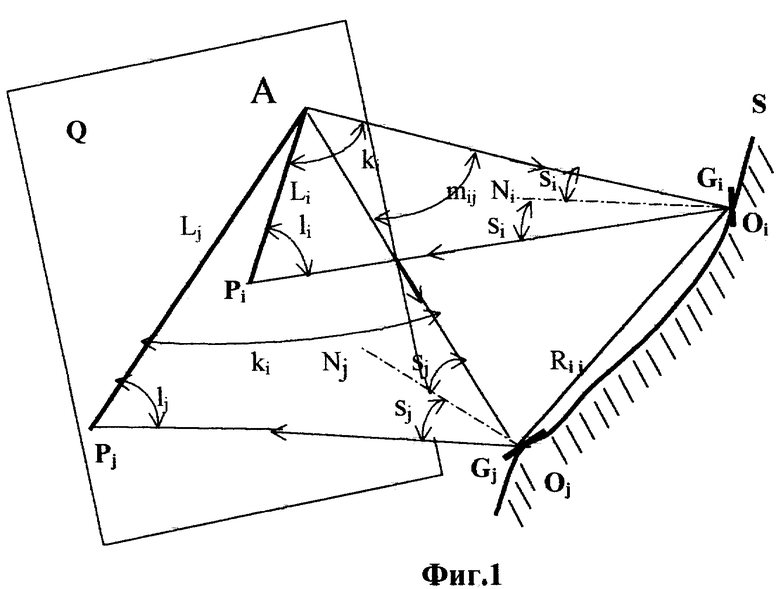
Способ определения расстояния между точками отражающей поверхности, включающий излучение с объекта сигналов по направлениям на выбранные точки отражающей поверхности, прием отраженных сигналов на объекте и определение расстояния между выбранными точками по соотношению направлений излучения и приема сигналов и известному расстоянию между точками излучения и приема, отличающийся тем, что последовательно для каждой выбранной пары точек отражающей поверхности из общего их числа измеряют угол расхождения осей излучения сигнала на каждую из точек выбранной пары, располагают точки приема отраженных сигналов на прямой, проходящей через точку излучения, и в каждой из них изменяют направление оси приема отраженных сигналов в плоскости, образованной указанной прямой и соответствующей осью излучения сигнала, до совмещения его с направлением прихода отраженного сигнала от участка поверхности в месте расположения точки, принадлежащей к выбранной паре и расположенной в этой плоскости, и затем при совмещении этих направлений фиксируют углы наклона осей излучения и приема сигналов к указанной прямой и определяют расстояние Rij между выбранными точками отражающей поверхности при помощи соотношения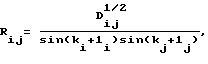
где
Vij= [cos ki-cos(2li+ki)] [cos kj-cos(2lj+kj)] ;
i, j= 1,2, . . . , n;
Lj - длина отрезка прямой, соединяющего точку А излучения сигнала с j-ой точкой приема, j= 1,2, . . . , n;
kj - угол наклона оси излучения сигнала из точки А объекта в направлении на выбранную j-ю точку отражающей поверхности к указанному отрезку прямой, j= 1,2, . . . , n;
lj - угол наклона оси приема отраженного сигнала в точке Рj объекта к указанному отрезком прямой, j= 1,2, . . . , n;
mij - угол расхождения осей излучения сигналов по направлениям на i-ю и j-ю точки отражающей поверхности, i, j= 1,2, . . . , n;
n - общее число точек отражающей поверхности.
| АВТОЭМИССИОННАЯ ЯЧЕЙКА | 1994 |
|
RU2072578C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПРИ ПОМОЩИ ОПТИЧЕСКОГО ПРИБОРА | 1992 |
|
RU2095756C1 |
| ЗУБНАЯ ЩЕТКА | 1992 |
|
RU2041690C1 |
| ВОДООТЛИВНОЙ КОМПЛЕКС ПЛАВАЮЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2246043C2 |
| DE 3216246 A1, 02.12.1982 | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| US 5608407 А, 04.03.1997 | |||
| US 5614912 А, 25.03.1997. | |||
