Дифференциальный планетарный механизм относится к области механики и может быть использован в качестве редуктора для привода машин и механизмов с увеличением передаваемой мощности либо в качестве двигателя с кинематической связью ведомого и ведущего валов с пусковым устройством.
Известен роторный радиально-поршневой двигатель, состоящий из статора с распределительным валом, полости высокого и низкого давлений рабочей среды разделены перегородкой и соединены с его отверстиями, и эксцентрично установленного с возможностью свободного вращения ротора с радиально установленными цилиндрами, поршнями и штоками, входящими в скользящий контакт с внутренней поверхностью статора, а рабочие полости цилиндров соединены отверстиями с внутренними полостями ротора, соответствующими полостям высокого и низкого давлений рабочей среды распределительного вала [1].
Недостатком является малое значение суммарной составляющей центробежных и центросмесительных сил, действующих на внутреннюю поверхность статора в одном направлении при больших значениях сил трения, создающих момент сопротивления вращению ротора, так как каждый поршень входит в контакт с внутренней поверхностью статора.
Наиболее близким решением технической задачи является дифференциальный планетарный механизм, состоящий из вала с центральным колесом, входящим в зацепление с планетарным колесом, закрепленным на оси, установленной с возможностью вращения в корпусе водила с валом, установленным с возможностью вращения в корпусе [2].
Недостатком является невозможность передачи вращающего момента на вал водила.
Целью предлагаемого изобретения является создание вращающего момента на валу водила с увеличением передаваемой мощности.
Поставленная цель достигается тем, что планетарное колесо выполнено в виде венца и закреплено на полом валу, на концах которого закреплены ротора с диаметральными расточками с одной закрытой торцовой стенкой, в которых установлены с возможностью свободного перемещения тела, соединенные парами тягами с возможностью взаимного перемещения в роторе и тягами с растяжками с возможностью их взаимного перемещения в полом валу, и тела установлены с первоначальными дебалансами масс со стороны открытых торцовых стенок расточек с закрепленными скользящими контактами, входящими в контакт с внутренней поверхностью водила, выполненной участками, соответствующими ускоренному и замедленному движению тела в направлении от центра и ускоренному и замедленному движению тел в направлении к центру, причем скользящие контакты тел входят в контакт с внутренней поверхностью водила только на участках с замедленным движением тел в направлении от центра и ускоренным движением тел в направлении к центру, а на остальных участках скользящий контакт движется параллельно внутренней поверхности водила без контакта, и участки, воспринимающие действие скользящего контакта сориентированы по направлению вращения водила, причем чем меньше величина сектора, на котором силы воздействуют на водило, тем больше величины центростремительных сил, а величина центробежных сил изменяется за счет количества тел, так как они выполнены в поперечном разрезе в виде прямоугольника, что позволит увеличить количество тел и их массу.
Центробежные и центростремительные силы, действующие в определенном секторе на внутреннюю поверхность водила, создают суммарную рабочую силу, под действием которой оно будет вращаться, а силы, препятствующие вращению ротора, будут равны сумме центробежных и центростремительных сил, умноженной на коэффициент трения скользящего контакта c внутренней поверхностью водила, значения которого в основном и определяют величину, на которую увеличивается мощность на валу водила по сравнению с мощностью на валу центрального колеса.
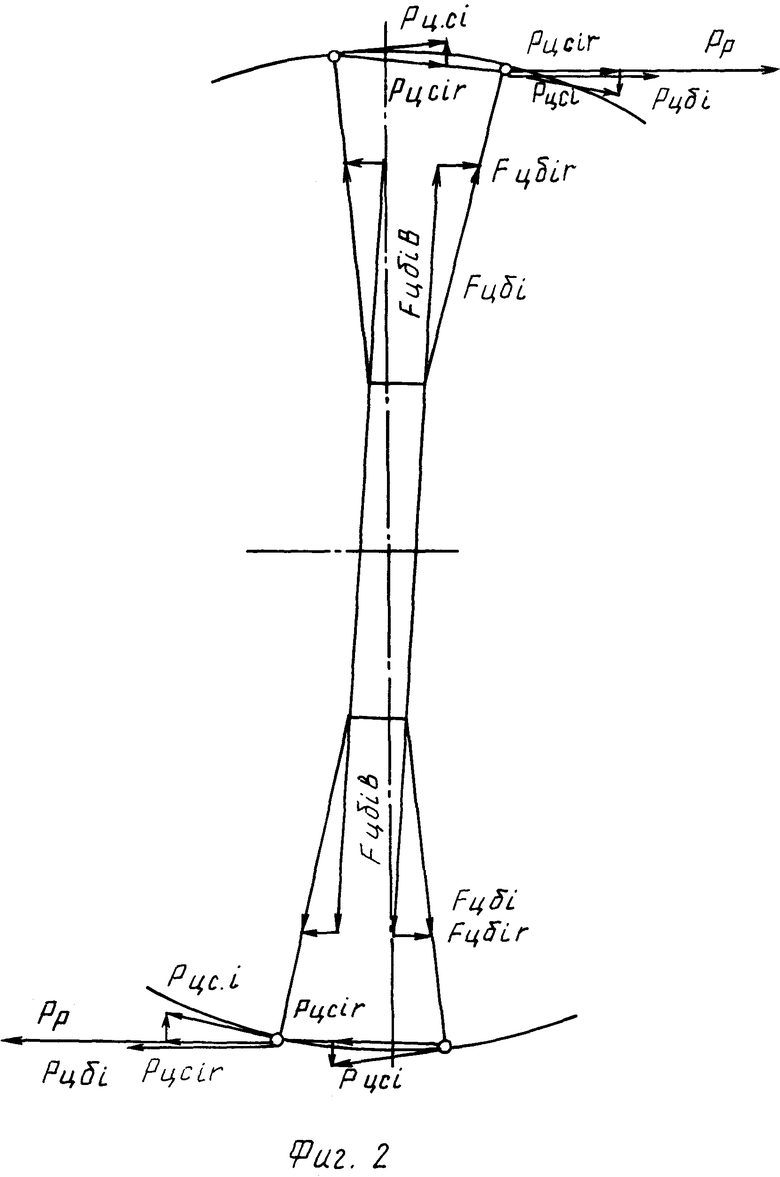
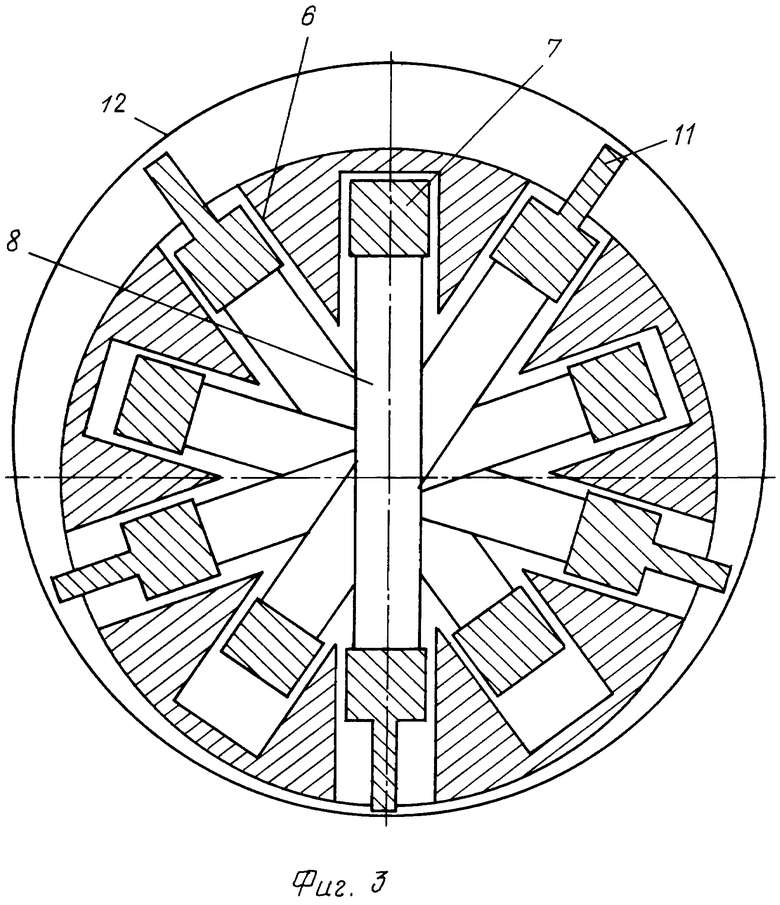
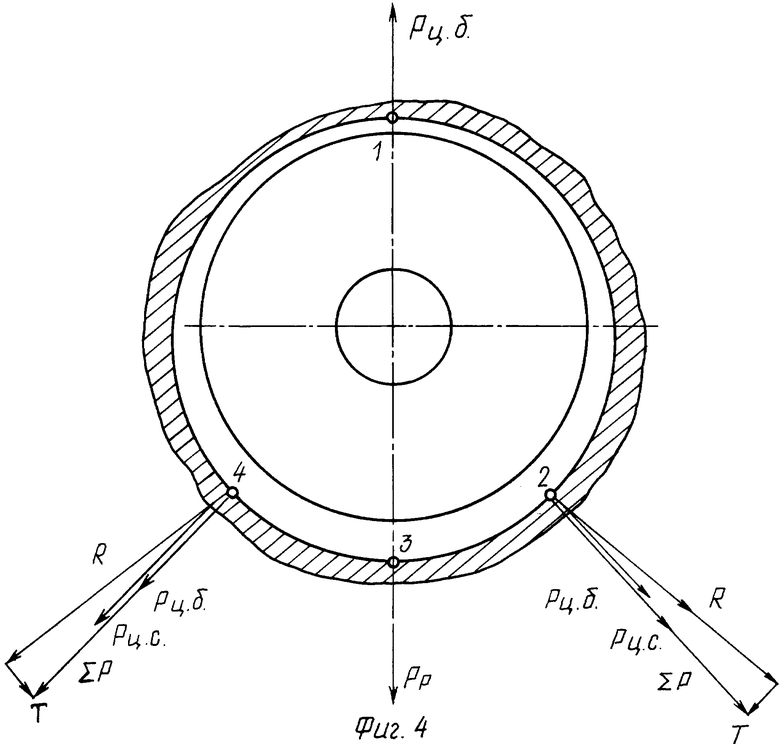
Сущность предлагаемого изобретения поясняется нижеследующим описанием и прилагаемыми к нему чертежами, где на фиг.1 дан общий вид предлагаемого изобретения; на фиг. 2 - схема действующих сил в плоскости вращения детали 12; на фиг.3 - детали поз. 6, 7, 8, 11, 12; на фиг.4 - схема действующих сил на деталь поз.12 в плоскости детали 5.
Предлагаемое устройство состоит из вала 1 с центральным колесом 2, входящим в зацепление с венцом планетарного колеса 3, закрепленного на полом валу 4, соединенного с диаметрально расположенными роторами 5, в которых выполнены диаметральные расточки 6 с одной торцовой стенкой, и в них установлены с возможностью свободного перемещения тела 7 с начальным дебалансом масс со стороны открытых торцовых стенок расточек 6 и соединены парами тягами 8 с возможностью взаимного перемещения в роторе 5 и тягами 9 с растяжками 10 с возможностью взаимного перемещения в полом валу 4, а скользящие контакты 11 тел 7 входят в контакт с внутренней поверхностью 12, выполненной участками: с ускоренным и замедленным движением тел 7 в направлении от центра ротора 5, ускоренным и замедленным движением их к центру, причем скользящий контакт 11 входит в контакт с внутренней поверхностью водила 12 только на участках с замедленным движением тел 7 в направлении от центра ротора 5 и ускоренным движением в направлении к центру ротора, и эти участки расположены соответственно направлению вращения водила 12, установленного с возможностью вращения в корпусе 13.
Устройство согласно предлагаемому изобретению работает следующим образом. При вращении вала 1 с центральным колесом 2 планетарное колесо 3 будет вращаться, и вместе с ним будут вращаться ротора 5 с телами 7, при этом первоначальный дебаланс масс их создает центробежные силы, определяемые по формуле:
где Δm - первоначальный дебаланс масс,
vi - скорость вращения центра дебаланса масс,
ri - радиус центра дебаланса масс.
Под действием этой силы тела 7 будут двигаться в направлении от центра ротора 5 с ускорением, определяемым по формуле:
где Σm - суммарная масса тел 7.
По мере движения тел 7 будут изменяться величины Δm, vi, ri, следовательно, и величины Рцбi и аi.
На участке движения ротора 5 от точки 1 до точки 2 скользящий контакт 11 движется параллельно внутренней поверхности водила 12, следовательно, внутренняя поверхность должна соответствовать траектории движения скользящего контакта 11 и определяется по формуле:
где аi1-2 - переменное ускорение движения в радиальном направлении тел 7,
tl-2 - время движения на участке 1-2 траектории.
В точке 2 внутренней поверхности водила 12 скользящий контакт 11 входит в контакт с ней, следовательно, на нее будут действовать следующие силы.
1. Центробежная сила, определяемая по формуле:
где Δmi2-3 - изменяющаяся величина дебаланса масс,
vi2-3 - изменяющаяся величина линейной скорости центра дебаланса масс,
ri2-3 - изменяющаяся величина радиуса центра дебаланса масс.
2. Центростремительная сила, определяемая по формуле:
Pцс2-3= Σm•a2-3,
где Σm - суммарная масса тел 7,
а2-3 - величина замедления движения тел 7 на участке 2-3, которая определяется по формуле:
где vk2 - величина скорости тел 7 в радиальном направлении в точке 2 траектории движения,
t2-3- время движения ротора 5 на участке траектории 2-3.
В точке 3 скорость тел 7 в радиальном направлении становится равной нулю.
Траектория движения скользящего контакта 11 на участке 2-3 определяется по формуле:
где v2 - скорость движения тел 7 в радиальном направлении,
t2-3 - время движения ротора 5 на участке траектории 2-3.
На участке траектории 3-4 внутренняя поверхность водила 12 выполнена таким образом, что при вращении ротора 5 скользящий контакт 11 вместе с телами 7 будет двигаться с ускорением в направлении к центру ротора 5, при этом на внутреннюю поверхность водила 12 будут действовать следующие силы.
1. Центробежная сила, определяемая по формуле:
где Δmi3-4 - изменяющаяся величина дебаланса масс на участке траектории движения 3-4,
vi3-4 - изменяющаяся линейная скорость движения центра дебаланса масс,
ri3-4 - изменяющаяся величина радиуса центра дебаланса масс.
2. Центростремительная сила, определяемая по формуле:
Pцс3-4= Σm•a3-4,
где Σm - суммарная масса тел 7,
а3-4 - ускорение движения тел в радиальном направлении, и оно должно быть таким, чтобы тела 7 получили скорость движения в радиальном направлении в точке 4 траектории достаточную, чтобы при движении на участке 4-1 траектории под действием центробежных сил, действующих на этом участке, в точке 1 скорость стала бы равной нулю.
Если величина а2-3 равна величине а3-4, то траектория симметрична относительно точки 3, но эти величины могут быть и не равны.
Траектория движения скользящего контакта 11 на участке 3-4 определяется по формуле:
где t3-4 - время движения ротора 5 на участке траектории 3-4.
На участке 4-1 траектории движения тела 7, получившие скорость в радиальном направлении под действием центробежных сил, должны остановиться в точке 1. Величина центробежных сил определяется по формуле:
Траектория движения скользящего контакта 11 на участке 4-1 определяется по формуле:
где v4 - скорость движения тел 7 в радиальном направлении,
t4-1 - время вращения ротора 5 на этом участке,
аi4-1 - замедление движения в радиальном направлении на этом участке, которое определяется по формуле:
В точке 1 траектории цикл начинает повторение.
Таким образом, на участке 2-3 и 3-4 на поверхность водила 12 действуют центробежные и горизонтальные составляющие центростремительных сил, которые дают суммарную силу Рр, последняя сила разлагается на радиальную R и тангенсальную Т составляющие силы.
Тангенсальные составляющие силы создают вращающиеся моменты на ротор 5, уравновешивающие друг друга. Радиальные составляющие силы создают рабочую силу, равную векторной сумме всех сил, одновременно действующих на участках 2-3 и 3-4. Эта сила создает вращающий момент на водило 12 и приводит его во вращение.
Возможны три варианта движений.
1. Водило 12 вращается в обратную сторону, чем центральное колесо 2. Из формулы определения угловой скорости планетарного колеса:
где r1 - радиус центрального колеса 2,
r2 - радиус планетарного колеса 3,
ω1 - угловая скорость колеса 2,
ω0 - угловая скорость водила 12
видно, что работа не устойчива, так как при уменьшении ω0 уменьшится ω2, следовательно, уменьшится сила Рр, восстановление возможно при увеличении угловой скорости 
2. Водило 12 вращается в том же направлении, что и центральное колесо, но с большей угловой скоростью. Работа не устойчива, как и в первом варианте.
3. Водило 12 вращается в том же направлении, что и центральное колесо 2, но с меньшей скоростью. Работа устойчива, так как при уменьшении угловой скорости водила 12ω0 увеличивается угловая скорость планетарного колеса 3, следовательно, увеличивается рабочая сила Рр, которая вращает водило.
Под действием рабочей силы Рр водило 12 будет вращаться, при этом на тела 7 будут действовать центробежные силы Fцбi, которые разлагаются на вертикальную Fцбiв и горизонтальную Fцбiг, воспринимаемые тягами 8, 9 и растяжками 10. Части неуравновешенных вертикальных составляющих сил Fцбiв воспринимаются поверхностями расточек 6 ротора 5, увеличивая силы трения при перемещении тел 7, а горизонтальных составляющих Fцбiг - складываются с центробежными силами Рцб.
Возможны варианты, когда при вращении водила 12 центральное колесо 2 может остановиться после получения необходимой угловой скорости водила 12 только для 1 и 2 вариантов.
Мощность, необходимая для вращения планетарного колеса 3, а следовательно, и центрального, определяется по формуле:
где ∑ Pцбi - сумма радиальных составляющих центробежных сил от всех тел 7, находящихся в скользящем контакте с внутренней поверхностью водила.
∑цсi - то же для центростремительных сил,
Кm - коэффициент трения скользящего контакта 11,
v2-4 - скорость движения скользящего контакта 11 на участке 2-4.
Мощность, полученная на водиле 12, равна
где  векторная сумма радиальных составляющих центробежных сил от всех тел 7, находящихся в скользящем контакте с внутренней поверхностью водила,
векторная сумма радиальных составляющих центробежных сил от всех тел 7, находящихся в скользящем контакте с внутренней поверхностью водила, то же для центростремительных сил,
то же для центростремительных сил,
v0 - линейная скорость водила.
Отношение
Векторная сумма сил незначительно отличается от алгебраической, так как они отличаются на cosα, где угол α равен углу между направлением силы и направлением рабочей силы Рр, и cosα колеблется в пределах от 0,7 до 1.
Линейные скорости водила vо и контакта 11 v2-4 отличаются также незначительно.
Величина  (при коэффициенте трения скольжения 0,001-0,008) будет находиться в пределах 125-1000.
(при коэффициенте трения скольжения 0,001-0,008) будет находиться в пределах 125-1000.
Следовательно, при самых плохих условиях мы получим увеличение мощности в 100 раз, а при разработке скользящего контакта эта величина будет увеличена.
При 1 и 2 вариантах вращения водила 12 и центрального колеса 2 величина vо может быть больше v2-4, что также увеличит соотношение мощностей.
Предлагаемое изобретение может быть применено в качестве редукторов с увеличением передаваемой мощности, в качестве самостоятельных двигателей без потребления известных видов энергии при условии отбора мощности от вала водила 12 и передачи ее на вал 1 центрального колеса с наличием пускового устройства.
Литература
1. Н. И. Колпин. Механика машин. Л. : Машиностроение, 1971 г., УДК 534/534.002.5, с. 530-532.
2. П. В. Коваль. Гидравлика и гидропривод горных машин. М.: Машиностроение, 1979 г., УДК 622.233; 621.22 (025.8), с. 95-97.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИТЕЛЬ МОЩНОСТИ | 2003 |
|
RU2263838C2 |
| СПОСОБ ЦЕНТРОБЕЖНОЙ АБРАЗИВНОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2401730C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Центрифуга для разделения суспензии минералов | 1985 |
|
SU1475478A3 |
| Способ и устройство для отделочно-упрочняющей центробежной обработки поверхностей деталей | 2021 |
|
RU2782589C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2381078C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2604908C2 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
Изобретение относится к машиностроению. Дифференциальный планетарный механизм содержит вал с центральным колесом, входящим в зацепление с планетарным колесом, на полом валу которого диаметрально закреплены роторы с расточками, в которых установлены тела с возможностью свободного движения с первоначальным дебалансом массы со стороны открытой торцовой стенки расточки. Тела парами соединены тягами с возможностью их взаимного перемещения в роторе и полом валу планетарного колеса. Скользящий контакт тел входит в контакт с внутренней поверхностью водила, выполненной из участков, соответствующих траекториям движения скользящего контакта, обеспечивая ускоренное и замедленное движение тел от центра и ускоренное и замедленное движение к центру. При определенных размерах радиусов водила и планетарного колеса мощности на валу водила и центрального колеса будут пропорциональны коэффициенту трения. Увеличена передаваемая мощность. 4 ил.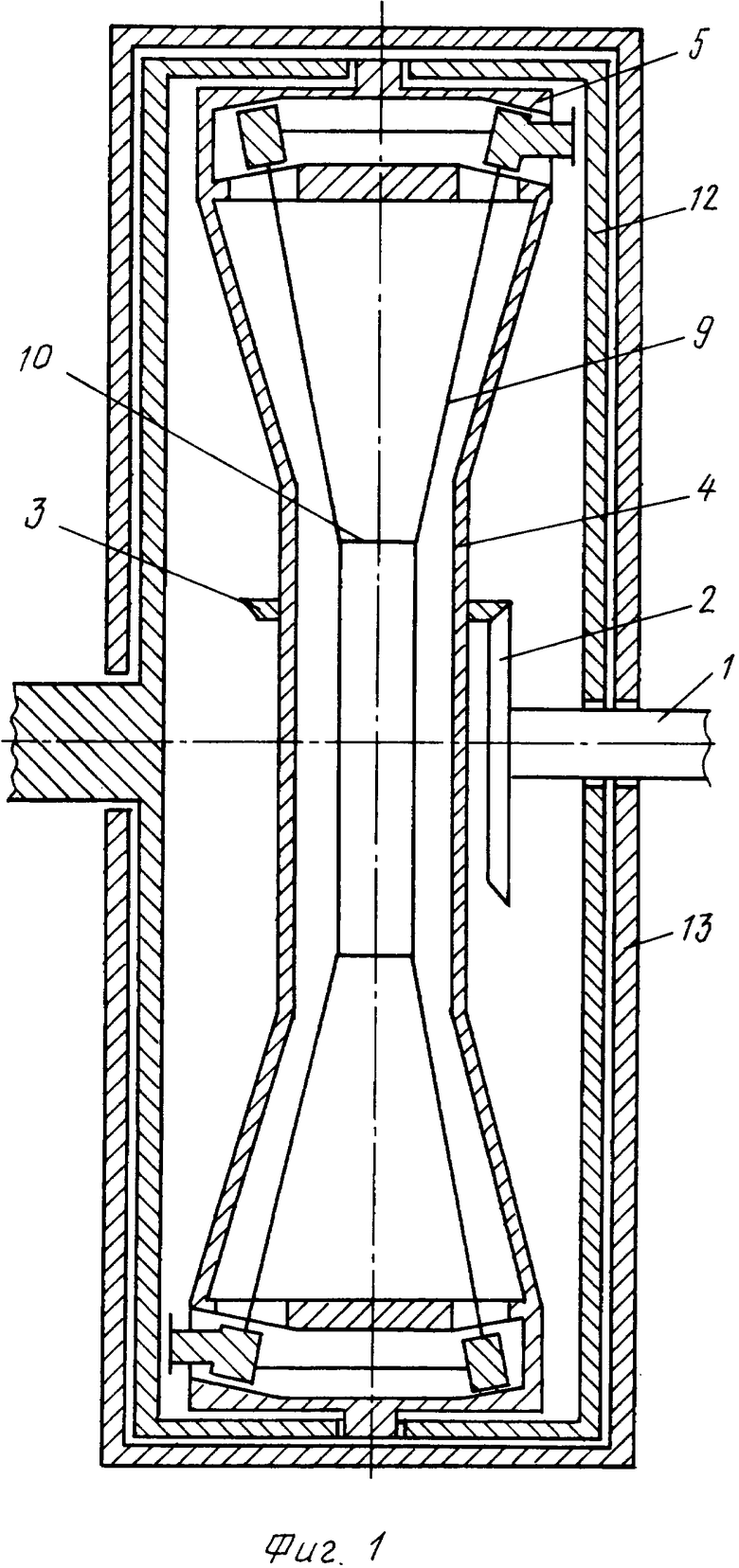
Дифференциальный планетарный механизм, состоящий из вала с центральным колесом, входящим в зацепление с планетарным колесом, установленным с возможностью свободного вращения в корпусе водила, установленного с возможностью свободного вращения в корпусе, отличающийся тем, что, с целью создания вращающего момента на валу водила и усиления передаваемой мощности, планетарное колесо выполнено в виде венца и закреплено на полом валу с диаметрально закрепленными роторами, в которых выполнены диаметральные расточки с одной открытой торцовой стенкой, и рабочие их поверхности выполнены по радиусу водила, в которых установлены с возможностью свободного перемещения тела с первоначальным дебалансом масс со стороны открытой торцовой стенки диаметральных расточек ротора и соединенные парами тягами, с возможностью их взаимного перемещения в роторе, и парами от двух роторов тягами, с растяжками с возможностью взаимного перемещения в полом валу планетарного колеса, а скользящие контакты тел входят в контакт с внутренней поверхностью водила, выполненной из участков, соответствующих траекториям движения тел: ускоренному и замедленному движению от центра ротора, ускоренному и замедленному движению в направлении к центру ротора, причем скользящий контакт входит в контакт с внутренней поверхностью водила только на участках с замедленным движением тел в направлении от центра ротора и ускоренным движением их в направлении к центру ротора, которые сориентированы в сторону вращения водила, а на других участках скользящие контакты движутся параллельно внутренней поверхности водила без контакта.
| Инерционная муфта Б.Ф.Кочеткова | 1991 |
|
SU1821582A1 |
| АВТОМАТИЧЕСКАЯ ИНЕРЦИОННАЯ МУФТА | 1963 |
|
SU214973A1 |
| Инерционная муфта Б.Ф.Кочеткова | 1991 |
|
SU1821581A1 |
| ГРАВИИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2080483C1 |

