Изобретение относится к области геофизического приборостроения, а именно к устройствам для осуществления разворота скважинной аппаратуры в буровой скважине, например сверлящих перфораторов, керноотборников и др.
В практике геофизических исследований скважин возникают проблемы разворота либо отдельных элементов скважинного прибора, либо всего прибора в целом. Так, известно устройство для проведения гамма-каротажа, в котором экран модулятора, расположенный внутри скважинного прибора, вращается с помощью двигателя (AC 203799 СССР. Прибор для исследования цементного кольца за обсадной колонной в скважинах. БИ 21, 1967). В тех случаях, когда необходимо развернуть корпус скважинного прибора, с внешней поверхностью которого связаны определенные датчики или инструмент, применяются устройства заякоревания одной части скважинного прибора, а другая, подлежащая развороту, приводится во вращение с помощью электропривода (Пат. 2090751 РФ. Устройство для поворота скважинных приборов. БИ 26 (2 ч.), 1997) Недостатком таких устройств является необходимость жесткой фиксации их со стенками скважины; при этом осуществляющие данную операцию узлы механизма заякоревания в условиях бурового раствора, высоких температур и давлений являются элементами низкой эксплуатационной надежности.
Наиболее близким к предлагаемой конструкции устройства является устройство разворота, используемое в комплексном скважинном приборе геофизического комплекса (Пат. 2112877 РФ. Геофизический комплекс. БИ 16, 1998), которое выбрано в качестве прототипа. В указанном случае поворот скважинного прибора производится за счет создания управляемым гироскопом гироскопического момента. Конструкция устройства содержит гиромотор, ротор которого вращается в опорах, закрепленных в рамке, которая в свою очередь установлена в корпусе скважинного прибора в опорах, обеспечивающих ей одну степень свободы вращения вокруг оси, перпендикулярной продольной оси скважинного прибора. Ось вращения ротора гиромотора перпендикулярна оси подвеса рамки. С осью подвеса рамки связаны задатчик момента и датчик угла. В целом совокупность устройства разворота и скважинного прибора можно представить в виде трехстепенного гироскопа, внешней рамкой которого является корпус скважинного прибора. Процесс разворота последнего осуществляется следующим образом. На задатчик момента поступает сигнал, при этом по оси подвеса рамки создается момент, однако в начальный период времени прецессия внешней рамки гироскопа (вращение скважинного прибора) отсутствует, так как по продольной оси скважинного прибора действует большой момент сил трения между скважинным прибором и стенками скважины. При этих условиях рамка с вращающимся ротором начинает ускоренно вращаться под действием момента задатчика момента и тем самым по продольной оси скважинного прибора создается возрастающий гироскопический момент, который в дальнейшем преодолевает момент сопротивления и производит разворот скважинного прибора на некоторый угол. Величина этого угла ограничена уменьшением упомянутого гироскопического момента (вследствие уменьшения эффективного кинетического момента гироскопа) по причине постепенного отклонения оси вращения ротора гиромотора от исходного положения, при котором упомянутая ось перпендикулярна продольной оси скважинного прибора. Следующий цикл дальнейшего разворота скважинного прибора возможен после приведения оси вращения ротора гиромотора в исходное положение, для чего задатчик момента развивает момент противоположного знака и меньшей величины, чем первоначальный момент. В этом случае создаваемый гироскопический момент не преодолевает момент сил трения между стенками скважины и скважинным прибором, и последний остается неподвижным (не совершает вращения в обратную сторону).
Недостатком указанного устройства являются сложность и малая надежность задатчика момента, который обычно выполняется в виде электродвигателя, работающего в заторможенном режиме. Размещение такого элемента непосредственно по оси подвеса рамки практически исключено вследствие габаритных ограничений конструкции устройства разворота. Осуществление наложения управляющего момента на гироскоп задатчиком момента, смонтированным на корпусе скважинного прибора, требует применения специальных кинематических звеньев, осуществляющих передачу управляющего момента от задатчика момента к рамке, с которой связан гиромотор. К числу упомянутых кинематических звеньев следует отнести зубчатые и фрикционные передачи, надежность работы которых в скважинной аппаратуре невысока. Кроме того, эффективность работы устройства разворота непосредственно зависит от величины кинетического момента гироскопа, представляющей произведение осевого момента инерции ротора гиромотора на угловую частоту его вращения. Если первый из указанных параметров (момент инерции) ограничен в том числе и размерами поперечного сечения скважинного прибора, то увеличение угловой частоты вращения ротора может привести к резкому снижению надежности работы устройства вследствие интенсивного разрушения опор подвеса ротора. В связи с этим желательно иметь конструкцию устройства разворота скважинного прибора, в которой наложение на гироскоп управляющего момента производилось бы с помощью элемента, который существенно надежнее и проще электродвигателя с сопутствующими последнему кинематическими звеньями, а увеличение кинетического момента гироскопа не должно увеличивать поперечные габариты устройства и снижать его надежность.
Задачей настоящего изобретения является повышение надежности и эффективности работы безопорного устройства разворота скважинного прибора, содержащего управляемый гироскоп.
Решение поставленной задачи достигается тем, что безопорное устройство разворота скважинного прибора содержит первую рамку с гиромотором, при этом ось подвеса этой рамки посредством опор установлена в корпусе скважинного прибора перпендикулярно продольной оси последнего. Ось вращения ротора гиромотора перпендикулярна оси подвеса рамки. С осью подвеса рамки в свою очередь связан датчик угла ее поворота. Первая рамка с помощью пружинной конструкции соединена с корпусом скважинного прибора. На упомянутом корпусе с помощью шарнира смонтирован сердечник с обмоткой электромагнита, а якорь электромагнита посредством шарнира связан с первой рамкой. Кроме того, с первой рамкой при помощи шарнирных связей соединены N дополнительных рамок с гиромоторами, оси вращения роторов которых перпендикулярны осям подвеса соответствующих рамок, а оси подвеса этих рамок, установленных посредством опор в корпусе скважинного прибора, в свою очередь параллельны оси вращения первой рамки.
Новизна изобретения заключается в том, что задатчик момента выполнен в виде совокупности электромагнита и пружинной конструкции, а кинетический момент управляемого гироскопа состоит из суммы кинетических моментов (1+N) гиромоторов.
Предлагаемое безопорное устройство разворота скважинного прибора представлено на чертеже. В корпусе скважинного прибора 1 посредством опор 2 закреплена первая рамка 3 с гиромотором 4, причем ось подвеса этой рамки перпендикулярна продольной оси скважинного прибора, а ось вращения ротора гиромотора в свою очередь перпендикулярна оси подвеса рамки. С корпусом 1 с помощью шарнира 5 связан сердечник с обмоткой 6 электромагнита. Якорь 7 указанного электромагнита шарниром 8 крепится к первой рамке 3. Пружинная конструкция 9 связывает первую рамку 3 и корпус 1. По оси подвеса первой рамки смонтирован датчик угла 10. С первой рамкой 3 с помощью шарнирных связей 11 соединены N дополнительных рамок 12 с гиромоторами 13. Оси подвеса дополнительных рамок установлены в опорах корпуса 1 параллельно оси подвеса первой рамки 3, а оси вращения роторов гиромоторов дополнительных рамок перпендикулярны осям подвеса этих рамок. Скважинный прибор 1 подвешен на каротажном кабеле 14 и находится в скважине 15.
Безопорное устройство разворота скважинного прибора работает следующим образом. На обмотку 6 электромагнита подается напряжение управления, при этом якорь 7, преодолевая упругий момент пружинной конструкции 9, начинает притягиваться к сердечнику, на котором расположена обмотка 6, тем самым создается управляющий момент Mу относительно оси подвеса первой рамки 3 или, другими словами, относительно внутренней оси подвеса трехстепенного гироскопа, который можно представить состоящим из вращающегося ротора гиромотора 4, внутренней рамки 3 и внешней рамки (корпуса скважинного прибора) 1, причем условная ось вращения последней совпадает с продольной осью скважинного прибора. Момент Mу, создаваемый по оси подвеса первой рамки 3, оказывает воздействие и на скважинный прибор, однако он уравновешивается моментом сил реакции вследствие касания корпуса скважинного прибора со стенками скважины. Вращение внешней рамки (прецессия указанного трехстепенного гироскопа) вокруг продольной оси скважинного прибора в начальный период времени не происходит, так как по этой оси гироскоп зафиксирован большим моментом сопротивления (трения) Мс. При таких условиях под действием момента Mу первая рамка 3 с вращающимся ротором гиромотора 4 начнет ускоренное вращение в опорах подвеса 2 как обычное твердое тело; при этом вокруг продольной оси скважинного прибора возникает гироскопический момент  где Н - кинетический момент ротора;
где Н - кинетический момент ротора;  - угловая скорость вращения первой рамки 3 в опорах 2. По мере нарастания угловой скорости соответственно будет увеличиваться гироскопический момент Mгα, величина которого в определенный момент времени превысит момент сил сопротивления Мс, и скважинный прибор при этом начнет разворачиваться вокруг своей продольной оси с угловой скоростью
- угловая скорость вращения первой рамки 3 в опорах 2. По мере нарастания угловой скорости соответственно будет увеличиваться гироскопический момент Mгα, величина которого в определенный момент времени превысит момент сил сопротивления Мс, и скважинный прибор при этом начнет разворачиваться вокруг своей продольной оси с угловой скоростью  в направлении, определяемом действием гироскопического момента Mгα. С появлением углового движения скважинного прибора 1 вокруг его продольной оси с угловой скоростью
в направлении, определяемом действием гироскопического момента Mгα. С появлением углового движения скважинного прибора 1 вокруг его продольной оси с угловой скоростью  на первую рамку 3 вокруг ее оси подвеса начнет действовать гироскопический момент
на первую рамку 3 вокруг ее оси подвеса начнет действовать гироскопический момент  направленный противоположно моменту Mу и уравновешивающий его. В этом случае первая рамка 3 будет поворачиваться с постоянной угловой скоростью, достигнутой к тому моменту времени, когда скважинный прибор начал вращаться вокруг его продольной оси. За время действия момента Mу скважинный прибор 1 повернется вокруг продольной оси на некоторый угол, величина которого зависит в конечном итоге от величины и характера изменения момента Mу при повороте первой рамки 3 от исходного положения; характер изменения упомянутого момента определяется видом тяговой характеристики электромагнита и механической характеристики пружинной конструкции. При достижении максимального угла поворота рамки βmax, о чем свидетельствует поступающая информация с датчика угла 10, напряжение управления с обмотки 6 электромагнита снимается и на первую рамку 3 начинает действовать упругий момент Мпр пружинной конструкции, направление которого противоположно по знаку ранее действовавшему управляющему моменту Mу. Описание процесса работы устройства разворота при этом повторяет ранее приведенное, однако, учитывая, что величина упругого момента Мпр много меньше величины управляющего момента Mу, то малая скорость
направленный противоположно моменту Mу и уравновешивающий его. В этом случае первая рамка 3 будет поворачиваться с постоянной угловой скоростью, достигнутой к тому моменту времени, когда скважинный прибор начал вращаться вокруг его продольной оси. За время действия момента Mу скважинный прибор 1 повернется вокруг продольной оси на некоторый угол, величина которого зависит в конечном итоге от величины и характера изменения момента Mу при повороте первой рамки 3 от исходного положения; характер изменения упомянутого момента определяется видом тяговой характеристики электромагнита и механической характеристики пружинной конструкции. При достижении максимального угла поворота рамки βmax, о чем свидетельствует поступающая информация с датчика угла 10, напряжение управления с обмотки 6 электромагнита снимается и на первую рамку 3 начинает действовать упругий момент Мпр пружинной конструкции, направление которого противоположно по знаку ранее действовавшему управляющему моменту Mу. Описание процесса работы устройства разворота при этом повторяет ранее приведенное, однако, учитывая, что величина упругого момента Мпр много меньше величины управляющего момента Mу, то малая скорость  поворота рамки в этом случае не сможет вызвать достаточный гироскопический момент (-Mгα), который был бы в состоянии преодолеть момент сопротивления трения скважинного прибора о стенки скважины. Поэтому под действием упругого момента Мпр пружинной конструкции корпус скважинного прибора вращаться не будет, а первая рамка 3 с вращающимся ротором гиромотора 4 будет как обычное твердое тело двигаться к исходному положению, при котором ось вращения ротора перпендикулярна продольной оси прибора. При достижении первой рамкой 3 исходного положения информация об этом снимается с датчика угла 10, что будет являться разрешением на организацию (в случае необходимости) следующего цикла разворота скважинного прибора. Шарнирное закрепление элементов электромагнита к корпусу скважинного прибора и к рамке предназначено для предотвращения заклинивания устройства при вращении рамки. Совокупность каждой из дополнительных рамок с соответствующим гиромотором и корпуса скважинного прибора также можно представить в виде трехстепенного гироскопа, подобно тому, как это было рассмотрено выше для первой рамки. Шарнирные связи первой рамки с дополнительными рамками обеспечивают наложение управляющих моментов, создаваемых работой электромагнита, и моментов пружинной конструкции на каждую из дополнительных рамок. При этом поведение скважинного прибора, определяемое действием каждого из условных дополнительных гироскопов, будет аналогичным поведению от действия первого гироскопа, состоящего из первой рамки с гиромотором и корпуса скважинного прибора. Таким образом, эквивалентный гироскопический момент, действующий вокруг продольной оси скважинного прибора и производящий его управляемый разворот, будет существенно больше при наличии дополнительных рамок с гиромоторами, т.к. упомянутый эквивалентный момент представляет собой сумму гироскопических моментов, создаваемых каждым из отдельных гироскопов.
поворота рамки в этом случае не сможет вызвать достаточный гироскопический момент (-Mгα), который был бы в состоянии преодолеть момент сопротивления трения скважинного прибора о стенки скважины. Поэтому под действием упругого момента Мпр пружинной конструкции корпус скважинного прибора вращаться не будет, а первая рамка 3 с вращающимся ротором гиромотора 4 будет как обычное твердое тело двигаться к исходному положению, при котором ось вращения ротора перпендикулярна продольной оси прибора. При достижении первой рамкой 3 исходного положения информация об этом снимается с датчика угла 10, что будет являться разрешением на организацию (в случае необходимости) следующего цикла разворота скважинного прибора. Шарнирное закрепление элементов электромагнита к корпусу скважинного прибора и к рамке предназначено для предотвращения заклинивания устройства при вращении рамки. Совокупность каждой из дополнительных рамок с соответствующим гиромотором и корпуса скважинного прибора также можно представить в виде трехстепенного гироскопа, подобно тому, как это было рассмотрено выше для первой рамки. Шарнирные связи первой рамки с дополнительными рамками обеспечивают наложение управляющих моментов, создаваемых работой электромагнита, и моментов пружинной конструкции на каждую из дополнительных рамок. При этом поведение скважинного прибора, определяемое действием каждого из условных дополнительных гироскопов, будет аналогичным поведению от действия первого гироскопа, состоящего из первой рамки с гиромотором и корпуса скважинного прибора. Таким образом, эквивалентный гироскопический момент, действующий вокруг продольной оси скважинного прибора и производящий его управляемый разворот, будет существенно больше при наличии дополнительных рамок с гиромоторами, т.к. упомянутый эквивалентный момент представляет собой сумму гироскопических моментов, создаваемых каждым из отдельных гироскопов.
Техническая реализация безопорного устройства разворота скважинного прибора может быть осуществлена с помощью известных элементов: гиромоторов, электромагнита, пружин, датчика угла. Шарнирные связи могут быть выполнены в виде параллелограмма или антипараллелограмма, но в каждом конкретном случае необходимо задавать направление вращения ротора соответствующего гиромотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО РАЗВОРОТА СКВАЖИННОГО ПРИБОРА | 2000 |
|
RU2184228C2 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
Изобретение относится к геофизическому приборостроению и предназначено для геофизических исследований. Техническим результатом является повышение надежности и производительности устройства. Для этого разворот скважинного прибора (СП) осуществляется за счет гироскопического момента, создаваемого управляемым гироскопом. Для чего в СП установлен гиромотор (ГМ) в рамке, ось вращения которой перпендикулярна оси вращения ротора и продольной оси СП. С рамкой шарнирно связан якорь электромагнита (ЭМ), сердечник с обмоткой которого также шарнирно смонтирован на корпусе СП. При подаче напряжения к обмотке ЭМ на рамку с ГМ начинает действовать момент, под влиянием которого рамка начинает ускоренно вращаться, создавая гироскопический момент, действующий по продольной оси СП. В случае преодоления указанным моментом момента трения между стенками скважины и СП последний начинает разворачиваться вокруг своей продольной оси. После отключения питания ЭМ движение СП прекращается. Возвращение рамки с ротором в исходное положение достигается за счет действия пружинной конструкции, связывающей рамку с корпусом СП. Для повышения эффективности устройства разворота предлагается использовать несколько рамок с ГМ. Причем оси подвеса этих рамок параллельны, а сами рамки соединены между собой шарнирными связями, ЭМ и пружинная конструкция в данном случае являются общими для всей совокупности рамок с ГМ. 1 ил.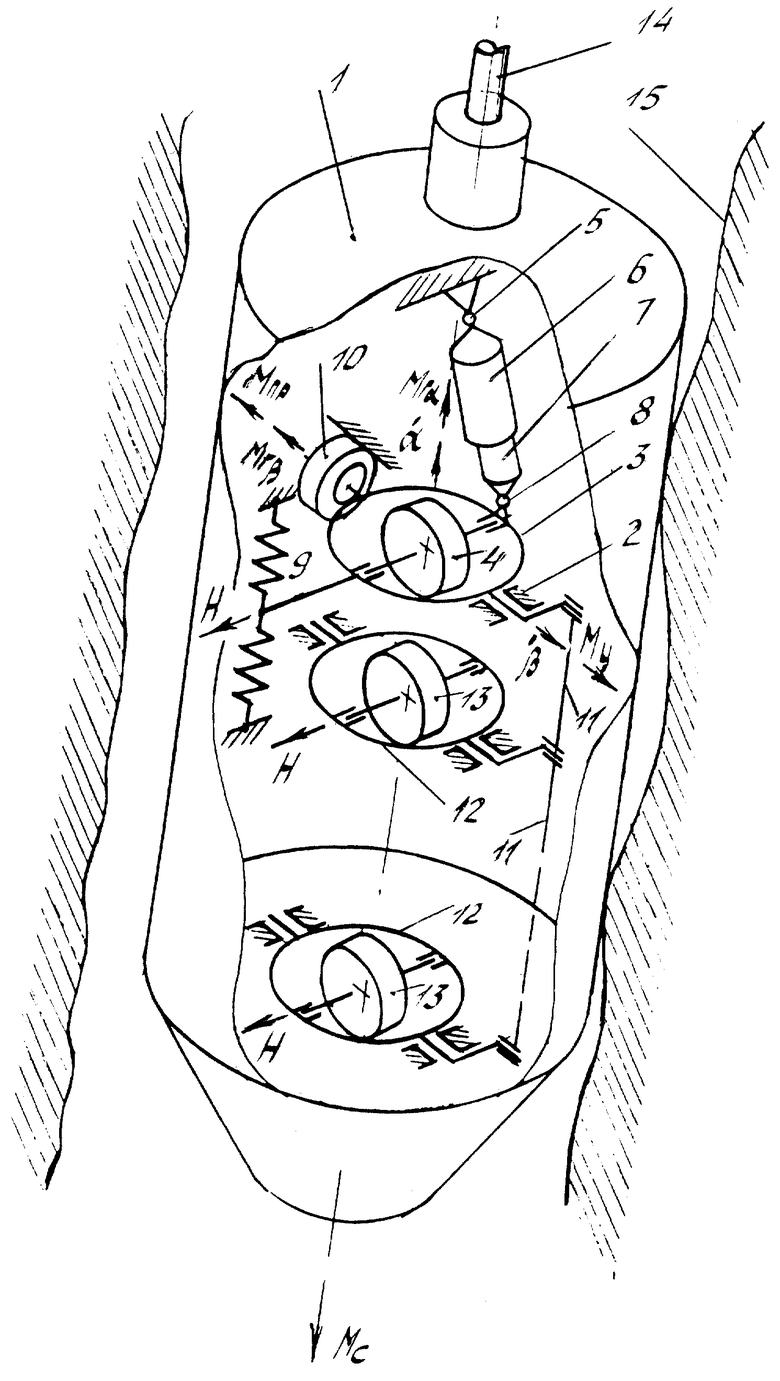
Безопорное устройство разворота скважинного прибора, содержащее первую рамку с гиромотором, ось подвеса которой посредством опор установлена в корпусе скважинного прибора перпендикулярно продольной оси последнего, а ось вращения ротора гиромотора перпендикулярна оси подвеса первой рамки, с которой связан датчик угла, отличающееся тем, что первая рамка связана пружинной конструкцией с корпусом скважинного прибора, на котором с помощью шарнира смонтирован сердечник с обмоткой электромагнита, якорь которого также посредством шарнира связан с первой рамкой, кроме того, с ней при помощи шарнирных связей соединены N дополнительных рамок с гиромоторами, оси вращения роторов которых перпендикулярны осям подвеса соответствующих рамок, а оси подвеса этих рамок установлены посредством опор в корпусе скважинного прибора, в свою очередь, параллельны оси вращения первой рамки.
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ЦЕМЕНТНОГО КОЛЬЦА ОБСАДНОЙ КОЛОННОЙ В СКВАЖИНАХ | 0 |
|
SU203799A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 0 |
|
SU282223A1 |
| Инклинометр | 1975 |
|
SU620588A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| Преобразователь наклона скважины и поворота скважинного снаряда | 1983 |
|
SU1125364A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2090751C1 |
| US 4192077 A, 11.03.1980 | |||
| US 4467526 A, 16.02.1984 | |||
| DE 3328261 A, 16.02.1984 | |||
| DE 3406096 A1, 30.08.1984 | |||
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ ВАЛА ПС36 | 2013 |
|
RU2531482C1 |
| УСТРОЙСТВО для ПОДАЧИ ДЕТАЛЕЙ | 0 |
|
SU172599A1 |
