Изобретение относится к области машиностроения, преимущественно к двигателям внутреннего сгорания, в частности к приводам их управления.
Известен электрогидравлический дистанционный привод (патент Японии №49-18678, н.кл. 54(8)D M74 г.), содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно с которым подключены резервные каналы.
Недостатком известного привода является отсутствие резервирования источников питания и распределителей в основных и резервных каналах, что снижает надежность привода.
Известен также электрогидравлический дистанционный привод по а.с. СССР 557208 (прототип) преимущественно для газотурбинных двигателей, содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно с которым подключены резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - к резервному электрогидравлическому распределителю и соединенных при помощи логического элемента ИЛИ и запоминающего блока с логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем.
Недостатком известного привода является его низкая надежность при управлении двигателем внутреннего сгорания на большом расстоянии от поста управления из-за отсутствия защиты по неисправности (обрыву цепей) задатчика и датчика обратной связи и из-за тяжелых условий эксплуатации датчика обратной связи электрического типа при установке исполнительного механизма и жестко связанного с ним кинематически датчика обратной связи непосредственно на двигателе внутреннего сгорания, в условиях повышенных механических воздействий и температуры от работающего двигателя.
Цель изобретения - повышение надежности электрогидравлического дистанционного привода для управления двигателем внутреннего сгорания на большом удалении от поста управления.
Для этого электрогидравлический дистанционный привод для двигателя внутреннего сгорания дополнительно снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенные логический элемент И и запоминающий блок, причем к входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления, выход запоминающего блока подключен к аварийной сигнализации, а вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды, при этом гидравлический исполнительный механизм, установленный непосредственно на двигателе и связанный жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью, выполненной в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя, в месте установки датчика обратной связи.
На чертеже изображена функциональная схема системы.
Двигатель внутреннего сгорания 1 снабжен регулятором 1.1 частоты вращения, настройка которого осуществляется кинематически связанным с регулятором органом 1.2 ручного управления частотой вращения.
Орган управления 1.2 соединен жесткой кинематической связью с гидравлическим исполнительным механизмом 2, установленным непосредственно на двигателе.
Это вызвано тем, что при перемещении органа 1.2 могут требоваться значительные усилия и достаточно большое быстродействие.
Исполнительный механизм 2 подключен гидравлическими каналами к электрогидравлическому распределителю 3.
Задатчик 4 частоты вращения двигателя 1 и электрический датчик обратной связи 5 следящего канала управления подключены ко входам логического блока 6.
Датчик обратной связи 5 установлен вне двигателя. Рычаг 5.1 датчика 5 кинематически связан с выходом исполнительного механизма 2 гибкой кинематической обратной связью, выполненной в виде троса 5.2, пропущенного через направляющий кожух 5.3 (например, типа "троса Боудена"). Концы кожуха 5.3 закреплены - один на двигателе, в районе исполнительного механизма 2, другой - вне двигателя, в районе установки датчика 5.
Датчик 5, установленный вне двигателя, не подвергается механическому и тепловому воздействию двигателя, а малое усилие перестановки рычага датчика при управлении позволяет обеспечить следящее управление частотой вращения двигателя с высокой точностью.
Выходы логического блока 6 при помощи блокировочных логических элементов И 7 и 8 подключены к обмоткам электрогидравлического распределителя 3.
В гидравлическом канале между исполнительным механизмом 2 и электрогидравлическим распределителем 3 включен гидравлический дроссель 9, регулирующий скорость отработки механизма 2.
Электрогидравлический распределитель 10 резервного канала управления подключен гидравлическими каналами к исполнительному механизму 2 параллельно распределителю 3 между дросселем 9 и механизмом 2.
Кнопочные замыкатели 11 и 12 резервного канала управления режимами двигателя 1 подключены к резервному источнику электропитания 13 при помощи переключателя 14 в его положении 14.1 - резервный канал включен, основные каналы блокированы.
В положении 14.2 переключателя 14 резервный канал отключен, блокировка основных каналов снята.
Выходы замыкателей 11 и 12 подключены к обмоткам распределителя 10 и при помощи логического элемента ИЛИ 15 - к входу записи запоминающего блока 16.
Выход блока 16 подключен к инверсным входам блокировочных логических элементов И 7 и 8 основных каналов управления. Вход сброса блока 16 подключен к переключателю 14 в его положении 14.2.
В гидравлических каналах между распределителем 10 и механизмом 2 включены гидравлический дроссель 17 с включенным параллельно ему невозвратным клапаном 18 и гидравлический дроссель 19 с аналогично включенным клапаном 20, регулирующим скорость отработки механизма 2.
Канал защиты привода от обрыва цепей задатчика 4 и датчика обратной связи 5 содержит логический элемент И 21, к входам которого подключены выходы задатчика 4 и датчика 5.
Выход И 21 подключен к прямым входам блокировочных элементов И 7 и 8 основных каналов управления и к инверсному входу записи запоминающего блока 22 канала защиты.
Выход блока 22 подключен к сигнализации 23, а вход сброса блока 22 подключен к резервному источнику электропитания 13 при помощи дискретного органа 24 отмены команды.
Привод работает следующим образом.
При управлении двигателем 1 при помощи следящего канала управления сигналы от задатчика 4 и датчика обратной связи 5 поступают на входы логического блока 6 и элемента И 21 канала защиты.
При нормальной работе следящего канала сигнал с выхода И 21 поступает на прямые входы блокировочных элементов И 7 и 8. При отсутствии на инверсных входах этих элементов сигнала с выхода запоминающего блока 16 резервного канала управления с выхода элемента 7 или 8 поступает сигнал на соответствующую обмотку распределителя 3. Распределитель 3 подает рабочую жидкость через дроссель 9 в соответствующую полость механизма 2, воздействующего на орган 1.2 управления регулятором 1.1 двигателя 1 и одновременно воздействующего при помощи гибкой кинематической обратной связи на рычаг 5.1 датчика обратной связи 5.
Гибкая кинематическая обратная связь состоит из троса 5.2, перемещающегося внутри гибкого кожуха 5.3 и повторяющего конфигурацию изгибов кожуха.
Трос 5.2 передает через рычаг 5.1 датчика 5 перемещение механизма 2, пока сигналы от задатчика 4 и датчика 5 на входах блока 6 не сравняются.
При выходе из строя следящего канала (обрыве цепи задатчика 4 или датчика 5) сигнал с выхода И 21 снимается, блокируя логические элементы И 7 и 8. На инверсном входе записи запоминающего блока 22 сигнал с выхода И 21 также снимается, блок 22 запоминает факт аварии и включает сигнализацию 23.
При необходимости продолжения управления двигателем оператор переводит переключатель 14 в положение 14.1 на управление двигателем 1 от резервного канала управления и производит управление при помощи кнопочных замыкателей 11 и 12.
При нажатии на замыкатель 11 или 12 сигнал с его выхода поступает на соответствующую обмотку распределителя 10 (при нажатии на оба замыкателя одновременно они блокируют друг друга).
Распределитель 10 подает рабочую жидкость через дроссель 17 или 19 на механизм 2, воздействуя на орган 1.2 управления регулятором частоты вращения двигателя. Другой дроссель 19 или 17 шунтируется невозвратным клапаном 20 или 18 соответственно.
Одновременно при нажатии любого из замыкателей 11 или 12 через элемент ИЛИ 15 подается сигнал на вход записи запоминающего блока 16, с выхода которого поступает сигнал на инверсные входы блокировочных элементов И 7 и 8, блокируя работу следящего канала.
Перевод запоминающего блока 16 в исходное состояние и разблокировка следящего канала осуществляется подачей сигнала на вход сброса блока 16 от переключателя 14 в его положении 14.2 при отключении питания резервного канала управления.
После восстановления исправности следящего канала управления разблокировка элементов И 7 и 8 осуществляется подачей на вход сброса запоминающего блока 22 сигнала от источника 13 резервного электропитания дискретным органом 24 отмены команды.
Введение в электрогидравлический дистанционный привод для двигателя внутреннего сгорания канала защиты по неисправности следящего канала управления и гибкой кинематической обратной связи между гидравлическим исполнительным механизмом, установленным непосредственно на двигателе, и датчиком обратной связи, установленным отдельно от двигателя, значительно повышает надежность привода и позволяет в полной мере использовать преимущества электрогидравлической системы при управлении двигателем на большом расстоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| Система управления двигателем | 1987 |
|
SU1499316A1 |
Изобретение относится к двигателестроению, в частности к приводам управления двигателями внутреннего сгорания. Изобретение позволяет повысить надежность электрогидравлического дистанционного привода для управления двигателем внутреннего сгорания на большом удалении от поста управления. Электрогидравлический дистанционный привод для двигателя внутреннего сгорания содержит основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, резервный источник электропитания, резервный электрогидравлический распределитель, логический элемент ИЛИ и запоминающий блок с блокировочными логическими элементами И. Привод снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенные логический элемент И и запоминающий блок. Ко входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи. Выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления. Выход запоминающего блока подключен к аварийной сигнализации. Вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды. Гидравлический исполнительный механизм, установленный непосредственно на двигателе и связанный жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью. Гибкая кинематическая обратная связь выполнена в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя, в месте установки датчика обратной связи. 1 ил.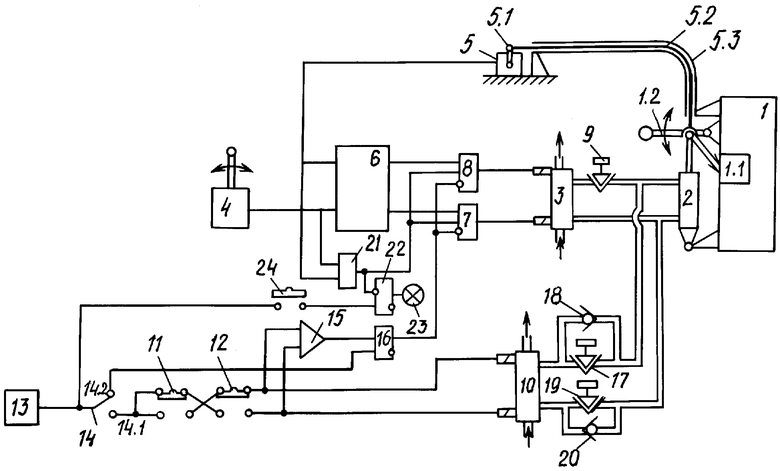
Электрогидравлический дистанционный привод для двигателя внутреннего сгорания, содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно с которым подключены резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем, отличающийся тем, что привод снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенные логический элемент И и запоминающий блок, причем ко входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления, выход запоминающего блока подключен к аварийной сигнализации, а вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды, при этом гидравлический исполнительный механизм, установленный непосредственно на двигателе и связанный жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью, выполненной в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя в месте установки датчика обратной связи.
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| SU 5572208 A, 20.06.1977 | |||
| Система дистанционного управления судовым двигателем | 1978 |
|
SU735815A1 |
| ПРОИЗВОДНЫЕ ГЕМИАСТЕРЛИНА И ИХ ПРИМЕНЕНИЕ ПРИ ЛЕЧЕНИИ РАКА | 2003 |
|
RU2342399C2 |
| US 4164120 A, 14.08.1979 | |||
| DE 19606098 A1, 22.08.1996. | |||

