Изобретение относится к судостроению, в частности, к системе дистанционного управления воздушными винтами из-меняемого шага судов на воздушной подушке.
Известна система дистанционного автоматизированного управления шагом воздушных винтов кораблей ва воздушной подушке, включающая в себя задатчик положения шага винта, формирователи управляющих сигналов, управляющие исполнительные механизмы, логические элементы «ИЛИ и «И, и сигнальную лампу контроля за наличием рассогласования.
Однако указанная система имеет недостаточное быстродействие, малую Н1адежн.ость,, отсутствие визуального контроля за наличием рассогласования между задатчиком и исполнительным механизмом.
Цель изобретения - повышение быстродействия и улучшение динамических характеристик системы, а также повышение надежности действия и исключения: аварийных ситуаций при обрыве линий связи от задающего устройства или датчика обратной связи. Для этого перед механизмом установки шага винта в систему включен двухскоростной реверсивный гидравлический исполнительный механизм с двухпозиционным электромагнитным краном, защитное устройство, выполненное на логическом элементе «И, электрически подключенного на входе сигнала электромагниту трехпозиционного крава. обеспечения визуального контроля за нали чием рассогласования между задатчиком
исполнительным механизмом на выходе фор мирователя уз.кой зоны включена сигнальна i лампа.
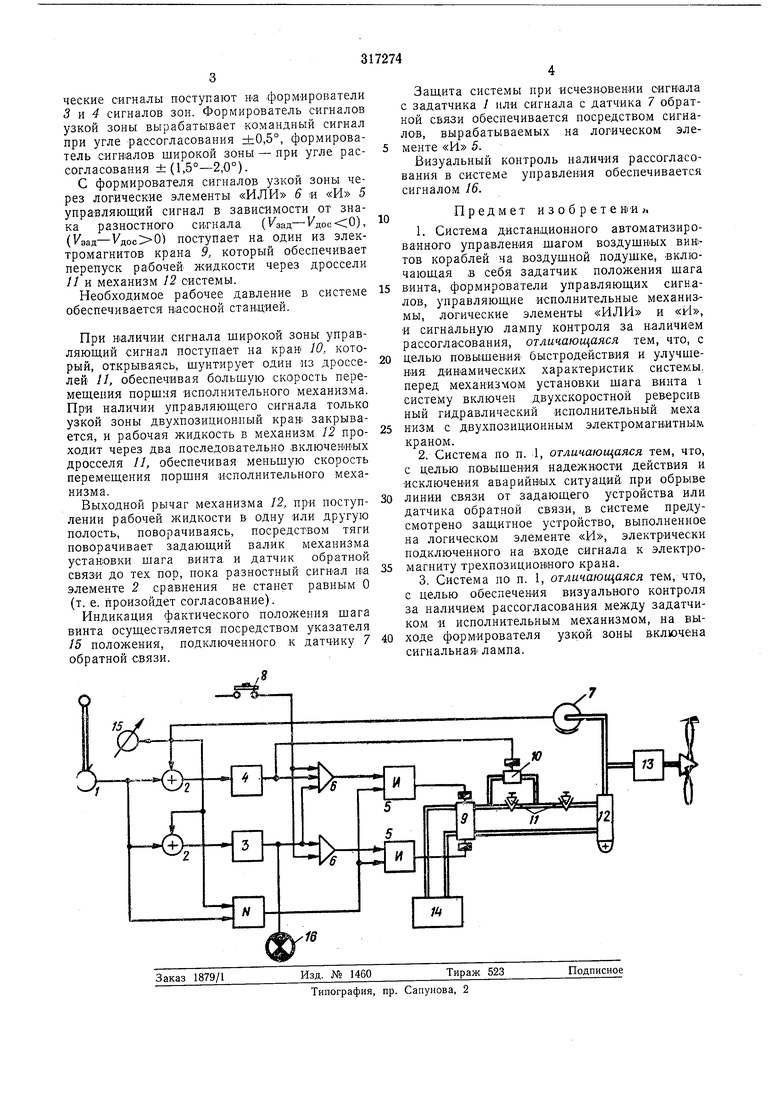
На чертеже представлена функцион1альна т схема предлагаемой системы.
Система состоит из задатчика / положени i шага винта, элементов 2 сравнения, формирователей 5 сигналов узкой зоны, формирователей 4 сигвалов широкой зоны, логически: с элементов «И 5, логических элементо 5
«ИЛИ 6, датчика 7 обратной связи, кнопки 8 включения и трехпозиционного 9 и двухпозициониого W электромагнитных крано. Кроме того, система состоит из гидравлических дросселей 11, исполнительного механизма 12, механизма 13 установки шага Бин1та, Насосной станции 14, указателей 15 положения шага винта и светового сигнала 16. Система работает следующим образом. Поворотом задатчика / на соответствую
щий угол устанавливается положение шаг; винта. Электрические сигналы, пропорциональные задаваемому углу поворота лопа стей винта и фактическому углу поворота и с датчика 7 обратной связи, поступают в
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ГЛАВНОЙ ТРАНСПОРТНОЙ ТУРБИНЫ | 1973 |
|
SU363632A1 |
| РЕГУЛЯТОР ДЛЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU370584A1 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1972 |
|
SU336527A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ МНОГОВАЛЬНОЙ СИЛОВОЙ УСТАНОВКИ | 1973 |
|
SU381066A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМБАЙНОМ | 1971 |
|
SU312048A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТРУЙНАЯ ЦИФРОВАЯ | 1967 |
|
SU205102A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
