Предлагаемый способ определения местоположения подвижного объекта может быть использован в радиолокации, системах дистанционного контроля, системах контроля за движением воздушного, водного, наземного, в т.ч. железнодорожного транспорта, а также грузов и живых объектов.
Известен способ определения местоположения подвижного объекта, выбранный в качестве ближайшего аналога, заключающийся в том, что с подвижного объекта излучают импульсный радиосигнал, принимают этот сигнал на опорной станции и передают, кодируя переизлученный сигнал индивидуальным для каждой опорной станции кодом, принимают переизлученный сигнал на пункте наблюдения, обрабатывают полученную информацию и тем самым определяют местоположение подвижного объекта [1].
Недостатком данного способа является то, что установленное на объекте устройство, излучающее радиосигнал, должно иметь источник питания.
Техническая задача предложенного способа заключается в повышении надежности.
Задача достигается тем, что в способе определения местоположения подвижного объекта, заключающемся в подаче кодированного сигнала от датчика, установленного на объекте, на приемно-передающее устройство и передаче информации на принимающий центр, приемно-передающие устройства, установленные в заранее известных точках, датчик подвижного объекта подает импульс под воздействием волновых сигналов излучателя приемно-передающего устройства, приемно-передающее устройство принимает сигнал, поступающий от датчика, обрабатывает его и передает на принимающий центр информацию о координатах, скорости и направлении движения подвижного объекта; при этом каждое приемно-передающее устройство имеет зону своего действия, приемно-передающие устройства имеют пространственное расположение и могут двигаться по известной траектории.
Предложенный способ реализуется с помощью схем, показанных на фиг.1 - 7.
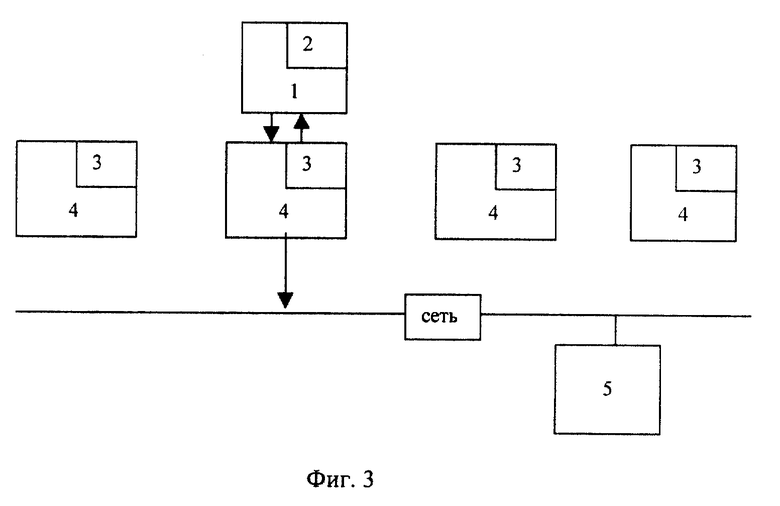
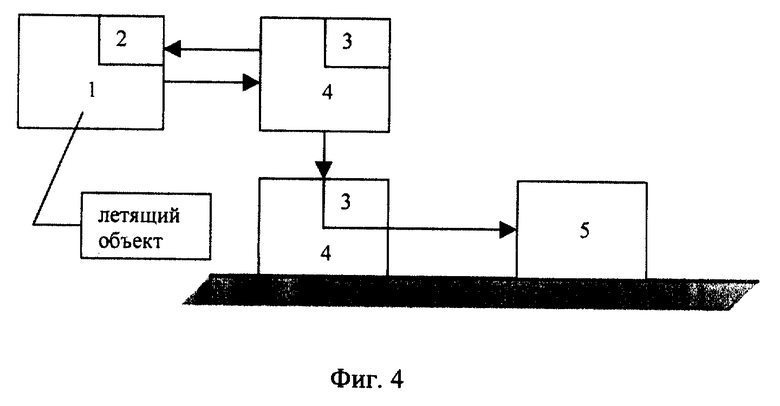
Схемы, изображенные на фиг.1 - 7, содержат: подвижный объект 1, на котором установлен датчик 2, активируемый волновым сигналом излучателя 3 приемно-передающего устройства 4, принимающий центр 5.
На фиг.1 и 2 показаны схемы с расположением приемно-передающих устройств в известных точках.
Датчик 2, установленный на объекте 1, попадая в зону действия приемно-передающего устройства 4, активируется при воздействии волнового сигнала, исходящего от излучателя 3, и передает на устройство 4 ответный кодируемый сигнал. Приемно-передающее устройство 4, получив кодируемый сигнал от датчика 2, обрабатывает сигнал и передает информацию о координатах, скорости и направлении движения объекта 1 на соседнее (ближайшее по расстоянию) приемно-передающее устройство 4, которое, в свою очередь, передает информацию на следующее приемно-передающее устройство 4, и так далее до принимающего центра 5. В результате на центр 5 приходит информация о координатах, скорости и направлении движения объекта 1, находящегося в зоне действия одного конкретного приемно-передающего устройства 4.
На фиг. 3 показана схема с расположением приемно-передающих устройств 4 вдоль заранее известного пути следования объекта 1. Датчик 2, установленный на объекте 1, попадая в зону действия приемно-передающего устройства 4, активируется при воздействии волнового сигнала, исходящего от излучателя 3, и передает на устройство 4 кодируемый сигнал. Приемно-передающее устройство 4 обрабатывает сигнал и передает информацию о координатах, скорости и направлении движения объекта 1, находящегося в зоне его действия, в местную сеть. По сети информация передается на принимающий центр 5.
На фиг.4, 5, 6, 7 показаны схемы с расположением приемно-передающих устройств 4 на различных уровнях пространства. Датчик 2, установленный на объекте 1, попадая в зону действия приемно-передающего устройства 4, активируется при воздействии волнового сигнала, исходящего от излучателя 3, и передает на устройство 4 кодируемый сигнал.
На фиг. 4, 5 приемно-передающее устройство 4, получив кодируемый сигнал от датчика 2, передает информацию о координатах, скорости и направлении движения объекта 1, находящегося в зоне его действия, на соседнее (ближайшее по расстоянию) приемно-передающее устройство 4. Оно, в свою очередь, передает информацию на принимающий центр 5.
На фиг. 6, 7 приемно-передающее устройство 4, получив кодируемый сигнал от датчика 2, передает информацию о координатах, скорости и направлении движения объекта 1 непосредственно на принимающий центр 5. В результате на центр 5 приходит информация о координатах, скорости и направлении движения объекта 1, находящегося в зоне действия одного конкретного приемно-передающего устройства 4.
Источники информации
1. Патент RU 2018858, кл. G 01 S 5/12, 1994 г.




Изобретение может быть использовано в радиолокации, системах дистанционного контроля, системах контроля за движением воздушного, водного, наземного, в том числе железнодорожного транспорта, а также грузов и живых объектов. Способ заключается в том, что передают волновые сигналы на датчик, установленный на подвижном объекте, при помощи излучателя приемно-передающего устройства, принимают переизлученный сигнал, определяют координаты подвижного объекта и передают информацию о них на принимающий центр. Информацию о координатах подвижного объекта передают последовательно от одного приемно-передающего устройства на другое, ближайшее, а затем на принимающий центр. Достигаемым техническим результатом изобретения является повышение надежности. 1 з.п. ф-лы, 7 ил.
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| СПОСОБ РАСПОЗНАВАНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2037838C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ СМЕННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1991 |
|
RU2042551C1 |

