Предложенное изобретение относится к системам дистанционного определения ориентации подвижных объектов.
Известна выбранная в качестве ближайшего аналога система целеуказания, содержащая вычислительное устройство, соединенное со средством оптического сканирования (Патент РФ №2208758, кл. МПК F 41 G 3/22, опубл. 20.07.2003 г., Бюл. №20).
Недостатками данной системы является то, что она реагирует на посторонние светоизлучения, как-то: солнечные блики на шлеме летчика и фонаре кабины самолета и др.; кроме того, на шлеме размещено дополнительное оборудование, которое увеличивает массу шлема, что, в свою очередь, может привести к травматизму при выполнении маневров, сопровождаемых большими перегрузками.
Технической задачей предложенной системы является обеспечение достоверного и бесперебойного целеуказания и устранение возможных причин травматизма.
Система целеуказания, содержащая вычислительное устройство, соединенное со средством оптического сканирования, в которую введен прицельный маркер, закрепленный при помощи кронштейна на шлеме со стороны лица летчика на уровне его глаз, при этом на прицельный маркер нанесена метка, а средство оптического сканирования выполнено в виде видеокамеры, объектив которой направлен на лицо летчика. При этом в ней вычислительное устройство состоит из соединенного своими входами с выходами видеокамер многоканального блока приема и предварительной обработки информации, соединенного своим выходом с входом блока распознавания и деления образов, на выходах которого установлены блоки индексации образов, своими выходами соединенные с входами блока определения координат шлема и блока определения координат лица летчика, блок определения координат шлема выходом соединен с входом блока определения координат метки на прицельном маркере, а блок определения координат лица летчика - с блоком определения координат центра зрачков летчика, блоки определения координат метки на прицельном маркере и определения координат центра зрачков летчика выходами соединены с входами блока распределения информации, который своим выходом соединен с входом блока формирования линии визирования, а он своим выходом соединен с входом блока формирования линии прицеливания и выдачи команд, блок формирования линии прицеливания и выдачи команд выходами соединен с входами систем управления авиационного оружия, при этом блоки индексации образов соединены с блоком распределения информации. Кроме того, в систему введен репер, нанесенный на шлем летчика в той его части, куда направлен объектив средства оптического сканирования, а средство оптического сканирования выполнено в виде нескольких видеокамер, удаленных друг от друга на известное расстояние, при этом их объективы направлен на лицо летчика.
Предложенное изобретение поясняется при помощи чертежа, на котором приняты следующие обозначения:
- многоканальный блок 1 приема и предварительной обработки информации;
- блок 2 распознавания и деления образов;
- блоки 3 индексации образов;
- блок 4 определения координат шлема;
- блок 5 определения координат лица летчика;
- блок 6 определения координат метки на прицельном маркере;
- блок 7 определения координат центра зрачков летчика;
- блок 8 распределения информации;
- блок 9 формирования линии визирования;
- блок 10 формирования линии прицеливания и выдачи команд;
- видеокамеры 11;
- шлем 12;
- прицельный маркер 13 (прицельный маркер может быть выполнен, например, в виде пластины, имеющей форму круга или прямоугольника, из прозрачного материала);
- метка 14 (метка на прицельном маркере может быть выполнена, например, в виде точки или перекрестия, нанесенного на плоскость прицельного маркера);
- зрачки 15.
Предложенная система целеуказания реализуется следующим образом.
На протяжении всего полета, при помощи средства оптического сканирования, состоящего из одной или нескольких видеокамер 11 (при использовании нескольких видеокамер повышается точность работы системы, т.е. возможность более точного определения линии визирования), объективы которых направлены на голову летчика, соединенных с вычислительным устройством, оснащенным программным обеспечением, ориентированным на распознавание ориентации и положения объектов в пространстве (например, Программа определения положения головы летчика во время полета Свидетельство об официальной регистрации программы для ЭВМ №2001611284), регистрируют положение лица или шлема 12 летчика относительно выбранной системы координат и передают полученные изображения на многоканальный блок 1 приема и предварительной обработки информации вычислительного устройства.
Многоканальный блок 1 приема и предварительной обработки информации осуществляет прием информации от видеокамер, вычленяет из полученного кадра образ головы оператора в шлеме и передает обработанную информацию на блок 2 распознавания и деления образов.
Блок 2 распознавания и деления образов осуществляет распознавание образов лица и шлема летчика. Отделяет образ лица летчика от образа шлема и передает их соответственно на блоки 4 и 5 определения координат шлема и лица летчика через установленные на его выходах блоки 3 индексации образов, которые присваивают одинаковые индексы образам лица и шлема 12 летчика и передают информацию о индексировании на блок 8 распределения информации. Образ шлема распознается по характерным элементам. Характерными элементами шлема 12 являются, например, группы вентиляционных отверстий, резиновое обрамление шлема в проеме для лица, контрастные метки определенной конфигурации, размера и цвета, например треугольник, который может наноситься краской или наклеиваться на шлем при помощи крепящего состава; для лица - овал лица, видимый в проеме шлема, рот, нос, переносица, видимые в глазной щели части белка, зрачки, надбровные дуги.
Блок 4 определения координат шлема определяет координаты шлема 12 относительно начала координат и передает их на блок 6 определения координат метки на прицельном маркере.
Блок 5 определения координат лица летчика определяет координаты лица летчика относительно начала координат и передает их на блок 7 определения координат центра зрачков летчика.
Блок 6 определения координат метки на прицельном маркере определяет координаты метки 14 на прицельном маркере 13 относительно начала координат и передает их на блок 8 распределения информации.
Блок 7 определения координат центра зрачков летчика определяет координаты центра зрачков 15 летчика относительно начала координат и передает их на блок 8 распределения информации.
Блок 8 распределения информации соединен с блоками 3 индексации образов, от которых получает номера соответствующих друг другу образов лица и шлема летчика. Передает попарно координаты метки 14 на прицельном маркере 13 относительно начала координат и координаты центра зрачков 15 летчика относительно начала координат, полученные в результате обработки образов с одинаковыми индексами на блок 9 формирования линии визирования.
Блок 9 формирования линии визирования выстраивает линию визирования, проходящую через точку с координатами центра зрачков 15 летчика относительно начала координат и точку с координатами метки 14 на прицельном маркере 13. После чего передает информацию на блок 10 формирования линии прицеливания и выдачи команд.
Блок 10 формирования линии прицеливания и выдачи команд формирует линию прицеливания авиационного оружия и по команде летчика выдает команду системам управления авиационного оружия на захват и поражение цели.
Таким образом, за счет введения в систему целеуказания прицельного маркера и выполнения средства оптического сканирования в виде одной или нескольких видеокамер обеспечивается достоверное и бесперебойное целеуказание и устранение возможных причин травматизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОЛЕТА ДЛЯ ОСУЩЕСТВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 2001 |
|
RU2206873C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМ И ФИЗИОЛОГИЧЕСКИМ СОСТОЯНИЕМ ЛЕТЧИКА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2000 |
|
RU2170953C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМ СОСТОЯНИЕМ ЛЕТЧИКА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2150886C1 |
| БОРТОВАЯ АКТИВНАЯ СИСТЕМА БЕЗОПАСНОСТИ ПОЛЕТОВ | 2001 |
|
RU2223542C2 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
Изобретение относится к системам дистанционного определения ориентации подвижных объектов. Сущность изобретения заключается в том, что система целеуказания содержит вычислительное устройство, соединенное со средством оптического сканирования, в которое введен прицельный маркер, закрепленный при помощи кронштейна на шлеме со стороны лица летчика на уровне его глаз. На прицельный маркер нанесена метка, а средство оптического сканирования выполнено в виде видеокамеры, объектив которой направлен на лицо летчика. Реализация изобретения обеспечивает достоверное и бесперебойное целеуказание. 1 з.п. ф-лы, 1 ил.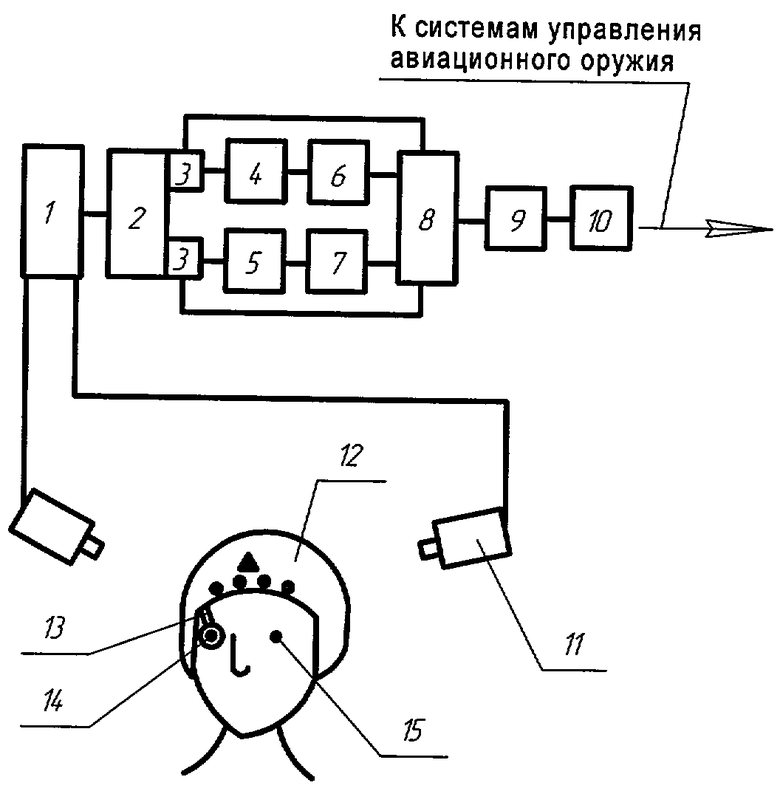
| СПОСОБ ВЫСОКОТОЧНОГО ЦЕЛЕУКАЗАНИЯ | 1999 |
|
RU2165062C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| US 5483865 A, 16.01.1996 | |||
| СПОСОБ НАЛОЖЕНИЯ СУХОЖИЛЬНОГО ШВА ПРИ ПОВРЕЖДЕНИЯХ СУХОЖИЛИЙ СГИБАТЕЛЕЙ КИСТИ | 2002 |
|
RU2234877C2 |
| СПОСОБ СБОРКИ БУРОВОГО ШАРОШЕЧНОГО ДОЛОТА КОРПУСНОГО ТИПА | 2017 |
|
RU2672702C2 |
| DE 1258302 A1, 04.01.1968. | |||

