Изобретение относится к области идентификации (определению статических параметров) автоматических систем и может быть использовано для экспериментального определения статических характеристик динамических объектов, входящих в многоконтурную систему автоматического управления, имеюипто один или несколько замкнутых контуров подчиненного регулирования.
Цель изобретения - повышение точности и расширение области изменения.
Поставленная цель достигается тем, что формируют сигнал задания, измеряют преобразуемую величину п-го контура исглгцуемои системы, полученный cTiii. сравнивают с сигналом обратит пязи n-го контура
модели. Формируют сигнал управления п-м контуром системы пропорционально полученной разности, измеряют преобразуемую величину n-го контура модели, полученный сигнал сравнивают с сигналом обратной связи n-го контура системы, формируют сигнал управления п-м контуром модели пропорционально полученной разности, измеряют преобразованные значения n-го контура системы и модели, а соответствующие статические параметры прямых К „ и обратных /1 преобразований определяют из соотношений
Јь
4
СЛ Ј
с&
Kn
fbn
Хп« Y((lw К П м
XY с
h L nw ° i-i
Sj JS -i-Sili-i-S-ii.iL i-lS.:.
S S r- i К ц
пм )
где X X
h
Им ;
8„, S
К
Плл
h
к„,
fnw - соответственно преобразуемая величина и ее преобразованно значение n-го контура системы и модели;Рь ,
соответственно, коэффициенты преобразований - результирующий, прямого и обратного преобразования n-го контура системы и модели Сущность работы данного устройства заключается в том, что в результате перечисленных операций преобразования сигналов ввиду взаимодействия, операторов преобразования исследуемой системы и модели получены две (для каждого контура) передаточные функции: передаточная фнукция исследуемого контура, в которую входят коэффициенты модели этого контура, и передаточная функция модел исследуемого контура системы, в которую входят коэффициенты системы. Из полученной системы уравнений путем соответствующих преобразований, алгоритм которых приведен в виде математических выражений, удается получить искомые величины„
Пусть исследуемая автоматическая система содержит п контуров регулирования. Тогда математическая модель, отражающая взаимосвязь статических параметров n-го контура управления, имеет вид
q S П-1 К ц
11
(1)
При этом n-й контур выполняет функцию контура главной обратной связи, а Х„ и Yh - сигналы задани и регулируемая координата. Все другие (n-i)-e контуры, входящие в состав n-го контура, выполняют функции контуров подчиненного регулирования. Например, в случае автоматизированного электропривода в качестве главной обратной связи используется контур регулирования скорости или позиционирования, а в качестве контура подчиненного регулирования - контур регулирования тока.
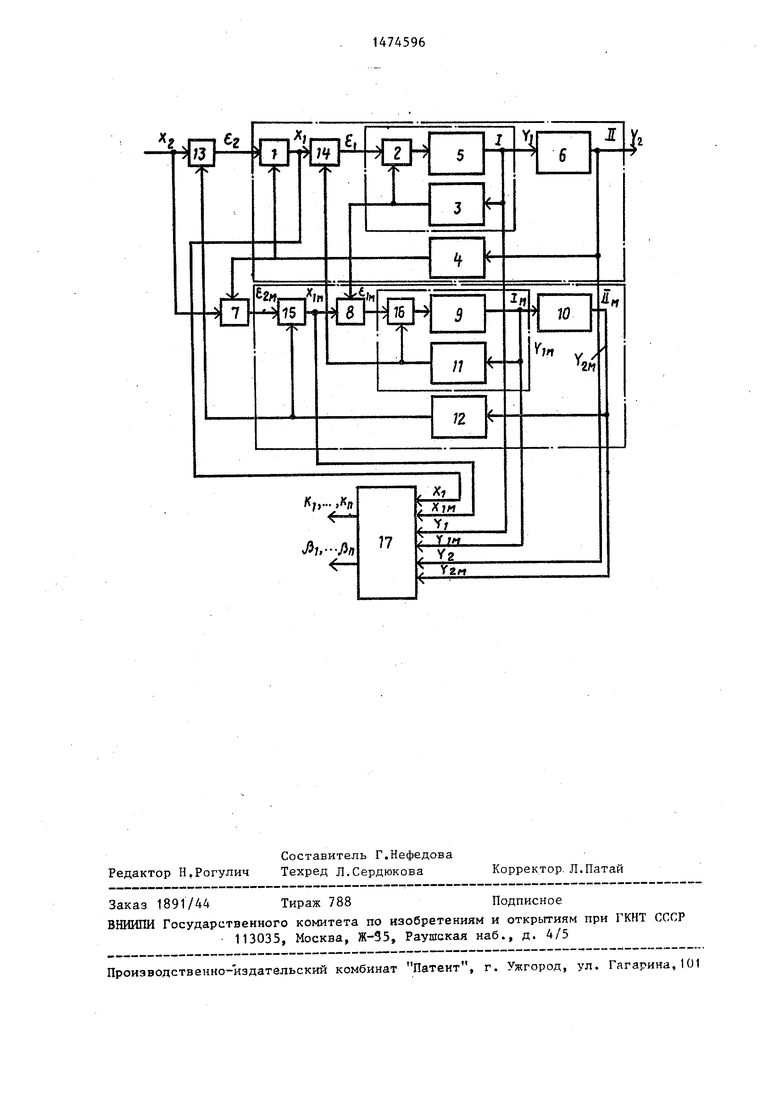
На чертеже представлена схема устройства.
0
5
0
5
Устройство состоит из первого и второго элементов 1 и 2 сравнения системы, первого и второго блоков 3 и 4 обратной связи, первого и второго объектов 5 и 6 управления, первого и второго элементов 7 и 8 сравнения модели, модель 9 первого объекта управления, модель 10 второго объекта управления, первого и второго блоков 11 и 12 модели обратной связи, третьего и четвертого элементов 13 и 14 сравнения системы, третьего и четвертого элементов 15 и 16 сравнения модели и блока 17 решения системы алгебраических уравнений.
Первый объект 5 управления и первый блок 3 обратной связи образует первый контур регулирования, второй объект 6 и блок 4 - второй контур регулирования.
Блок 17 представляет собой известный аналоговый блок, предназначенный для решения системы уравнений.
Определение статических коэффициентов преобразования замкнутой многоконтурной систе мы с помощью данного устройства начинают с определения коэффициентов первого контура. Тогда математическая модель, определяющая соотношение статических параметров, определяется следующим соотношением:
0
0
5
5
Е,
где Е, и Y,, Х.1- . К т
1 + К,/ь,
(2)
,, к,.
преобразуемый автоматической системой в первом контуре сигнал и его преобразованное значение; (ь, - соответственно коэффициенты преобразования - результирующий, цепей прямого и обратного преобразования.
При этом выражение для первого контура модели имеет вид
, (3)
1 + К m f 1M
- преобразуемая мо- челью первого контура величина и ее преобразованное значение;
где
.„ит
SIM КГЛ1, Pi - соответственно
коэффициенты преобразования - результирующий, цепи прямого и обратного преобразования модели. При этом формируется сигнал X,,,
достаточно малыми, например, в пределах ошибки преобразования первого контура, влияние статических коэффициентов модели на результирующий коэффициент преобразования системы.может иметь весьма малую величину.
В соответствии с сигналом Xf, поизмеряется сигнал Х1 первого конту- IQ даваемым на вход первого контура сира исследуемой системы, полученный сигнал сравнивается с сигналом Y 1М на выходе первого контура модели, формируется сигнал управления Ј, , подаваемый на вход первого контура системы пропорционально полученной разности в соответствии с уравнением
15
стемы, получают сигнал Y на выходе в соответствии с уравнением
Y, (1 + К,р,+ К ,„/}„,) KtXff(10)
а в соответствии с сигналом X1v, подаваемым на вход первого контура модели, сигнал Yr/w на выходе в соответствии с уравнением
Ј1 - X , - А Л, Y1M ,
(4)
достаточно малыми, например, в пределах ошибки преобразования первого контура, влияние статических коэффициентов модели на результирующий коэффициент преобразования системы.может иметь весьма малую величину.
В соответствии с сигналом Xf, подаваемым на вход первого контура си
стемы, получают сигнал Y на выходе в соответствии с уравнением
Y, (1 + К,р,+ К ,„/}„,) KtXff(10)
а в соответствии с сигналом X1v, подаваемым на вход первого контура модели, сигнал Yr/w на выходе в соответствии с уравнением
Y1/w (1 + К,р,+ К,) К,„ХТА,. (11)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство адаптивной настройки статических параметров многосвязной автоматической системы | 1988 |
|
SU1596310A1 |
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1977 |
|
SU1107107A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕГУЛЯТОРА | 2019 |
|
RU2714567C1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2144217C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1290255A1 |
Изобретение относится к идентификации автоматических систем. Цель изобретения - повышение точности и расширение области применения устройства. Формируют сигнал задания. Измеряют сигнал задания N-м контуром автоматической системы. Полученный сигнал сравнивают с сигналом обратной связи N-го контура модели. Формируют сигнал управления N-м контуром пропорционально полученной разности. Измеряют преобразуемую величину N-го контура модели. Сравнивают полученный сигнал с сигналом обратной связи N-го контура системы. Формируют сигнал управления N-м контуром модели пропорционально полученной разности. Соответствующие коэффициенты прямых и обратных преобразований находят по определенным формулам. 1 ил.
где
- коэффициент обратного преобразования первого контура модели.
Измеряется сигнал X., , полученное значение сравнивается с сигналом Y., на выходе обратной связи первого контура системы, формируется сигнал управления Ј(М , подаваемый на вход первого контура модели пропорционально полученной разности по соотношению
т % it Р Ч 1
(5)
где
Л, - коэффициент обратного преобразования первого контура системы.
Решением уравнений (2)-(5) является соотношение
О Y Sl(l - ST«Jb7j
1 - r r s st7pT
для исследуемой системы и
о YJM StM (1 - ЗгЛ )
|М
X
(6)
(7)
1М
1М
для модели.
После подстановки уравнений (2) и (3) в (6) и (7) получают К,.
si г+ ктр;+ к,м/ьтм
(8)
К 1М.
(9)
Из уравнения (8) очевидно, что при выборе коэффициентов К (м и ft 1M
Из уравнения (11) можно получить аналитическое выражение для коэффи- 25 циента обратного преобразования р, исследуемого контура
X™ - Y,«(1+Ki«P «)
кд„
(12)
30
Подставив (12) в (10), получают
4 1Л
К
1М
х,,
. (13)
откуда
X (л Y1К -JM
(14)
Если выполнить условие равенства сигналов X, и Х,м, выражения (13) и (14) приобретают свойство инвариантности относительно преобразуемых сигналов
v - iJ у
R 1 V 1« 1 1 v
(15)
Следовательно, измеряя в установившихся режимах сигналы Xf, Х1м, Y1M на входе и выходе системы
и модели по известному коэффициенту преобразования модели , можно вычислить в блоке 17 коэффициент пря- мого преобразования К, первого контура системы. Коэффициент обратного
преобразования при этом определяется из соотношения
N
s.uil-i iL jsJL .ri к , s ,
(16)
Далее определяется коэффициент прямого преобразования второго контура. Для этого контура первый контур с результирующим коэффициентом преобразования S1 выполняет функцию контура подчиненного регулирования. Тогда математическая модель исследуемой системы, определяющая соотношение статических параметров, имеет вид
ч 1г
Ь В Ј«
17)
, К
Ј4 , Y г - преобразуемая величина и ее преобразованное значение для второго контура системы;
рг- соответственно коэффициенты преобразования - результирующий, цепей прямого и обратного преобразования второго контура. Соответствующая модель имеет вид
8йм
(18)
YjZM S 1м К 2м
-1м 1 + S 1м Кгм В соответствии со схемой устройства измеряют сигнал X полученное значение сравнивают с сигналом на выходе обратной связи Y IM на выходе модели, формируют сигнал управления EI, подаваемый на вход второго контура системы пропорционально полученной разности в соответствии с уравнением
Ј-1 X „ ft 4м глч
(19)
где fb i - коэффициент обратного преобразования второго контура модели. Измеряют сигнал Х1М, полученное значение сравнивают с сигналом Y1 на выходе второго контура системы, формируется сигнал управления Ј4« подаваемый на вход модели пропорционально полученной разности в соответствии с уравнением
1М 1М P-Z.Y
1
(20)
Совместное решение уравнений
(17) - (20) приводит к следующим с°-55формула изобретения отношениям:
Устройство для идентификации
Sii(1 8г мр2/и. о) статических параметров многосвяз- g --- --------- - 5 (Ј)
1 $ П 5М
ной автоматической системы, содер - S-lnil-I-S 1)
2М х,
(22)
После подстановки (17) и (18) в уравнения (21) и (22) получают
S,
S,Ki
1 + 8,Кг р,г+ 8,ЖК1Ж/Ь4Л
(23)
--JA.lS-.2L.
Т
К ат $г
(24)
1мЛ г/и
При выборе коэффициентов К г« и р4|(Я в области малых значений можно считать, что S i Ss.
В соответствии с сигналом X i получают сигнал Y на выходе второго контура системы в соответствии с уравнением
Y2(1 + 8, + 8шКая р)
S К X(25)
& 1Л ЈЛ 2
и сигнал на выходе модели Y г (1 Sf К г р2 + 81М. К зм )
К1мХам-(26)
Из уравнения (26) также можно получить аналитическое выражение для коэффициента обратного преобразова- ния
§i.5i L2ji I X iii§-L l 5jir Ј.
(27)
Подставив (27) в (25), получают
f4
Y Y7,
Поэтому, измеряя установившиеся 45 значения X,, Х1т, Y „ Y1W, Y4, YZM, можно вычислить в блоке 17 соответствующие коэффициенты:
v XIM YtSiMKa« , K- а о
Ь
(29)
и
14
SiKoL - Si(1 + S,«;K j«Jbj«i
Q 4 О
(30)
статических параметров многосвяз-
ной автоматической системы, содержащее два элемента сравнения системы, два блока обратной связи, причем выход второго элемента сравнения системы подключен через первый объект управления к входу первого блока обратной связи и входу второго объекта управления, выход которого соединен через второй блок обратной связи с первым входом пер- вого элемента управления системы и с первым входом первого элемента сравнения модели, выход первого блока обратной связи подключен к первому входу второго элемента срав- нения системы и первому входу второго элемента сравнения модели, модель первого объекта управления, выходом подключенная к входу модели второго объекта управления и к входу первого блока модели обратной связи, выход модели второго объекта управления соединен с входом второго блока модели обратной связи, отличающееся тем, что, с целью повышения .точности и расширения области применения, в него введены третий и четвертый элементы сравнения системы, третий и четверты элементы сравнения модели и блок решения системы алгебраических уравнений, причем первый вход третьего элемента сравнения системы и второй вход первого элемента сравнения модели соединены с входом устройства, выход второго блока модели обрат- ной связи соединен с вторым входом третьего элемента сравнения системы и вторым входом третьего элемента сравнения модели, первый вход которого подключен к выходу первого элемента сравнения модели, выход тртьего элемента сравнения системы соединен с вторым входом первого элемента сравнения, выход которого соединен с первым входом четвертого элемента сравнения системы и с первым входом блока решения системы алгебраических уравнений, выход третьего элемента сравнения модели подключен к первому входу второго элемента сравнения модели и к второму входу блока решения системы алгебраических уравнений, выход четвертого элемента сравнения системы соединен с вторым входом второго элемента сравнения системы, выход первого блока модели обратной связи подключен к второму входу четвертого элемента сравнения системы и к второму входу четвертого элемента сравнения модели, первый вход которого соединен с выходом второго элемента сравнения модели, а выход - с входом первой модели, третий вход блока решения системы алгебраических уравнений соединен с выходом первого объекта управления, четвертый вход - с выходом модели первого объекта управления, пятый вход - с выходом второго объекта управления, шестой вход - с выходом модели второго объекта управления, а первый и второй выходы блока решения системы алгебраических уравнений являются соответственно первым и вторым выходами устройства,,
| Electronic Design, 1974, v.24, № 22, p.170-173, Fig.2, Приборы и системы управления, 1973, № 7, с.13, рис.45. |
