Изобретение относится к робототехнике и может быть использовано при создании новых моделей роботов.
Известен промышленный робот ПР601/60, выпускаемый ПТО АО "АвтоВАЗ" (проспект "Промышленный робот ПР601/60" АвтоВАЗ, зак. 4274, тип. ВАЗа прилагается), содержащий манипулятор с шестью степенями подвижности, каждая из которых имеет механический привод и электродвигатель постоянного тока с транзисторным управлением, систему управления с приводами постоянного тока, а также соответствующее электрооборудование, устанавливаемое на манипуляторе и включающее в себя конечные выключатели, датчики базовых точек, а также кабели с разъемами и клеммами. При этом в качестве датчика скорости используется тахогенератор, а в качестве датчика положения - невстраиваемые резольверы, относящиеся к бортовому электрооборудованию.
К недостаткам известного промышленного робота относятся: ограниченная рабочая зона, низкое быстродействие, низкие функциональные и технологические возможности, а также недостаточная эксплуатационная надежность. Кроме того, такие модели роботов морально устарели.
Наиболее близким по технической сущности к предлагаемому изобретению является промышленный робот ПР161, выпускаемый ПТО АО "АвтоВАЗ" (проспект "Промышленный робот ПР161/60.1", зак.4273, тип. ВАЗа прилагается), который содержит манипулятор с шестью степенями подвижности, каждая из которых обеспечена посредством оси, снабженной механическим приводом и электродвигателем постоянного тока с транзисторным управлением, систему управления с электромеханическим аналоговым приводом, подключенным к электродвигателям постоянного тока и оснащенным тахогенератором, встроенным тормозом, датчиком абсолютных значений, и соответствующее электрооборудование, установленное на манипуляторе.
К недостаткам известного робота относятся:
- во-первых, применение двигателей постоянного тока снижает надежность робота из-за наличия щеток на двигателе и тахогенераторе, имеющих из-за этого малый ресурс;
- во-вторых, наличие на осях степеней подвижности манипулятора робота электронных датчиков положения приводит к снижению надежности робота из-за работы электроники в жестких условиях эксплуатации, в которых обычно работает манипулятор робота (температура, грязь, пыль, влажность, вибрация и т.д. );
- в-третьих, для считывания положения осей степеней подвижности и их скорости используются два разных датчика, каждый из которых имеет недостатки, описанные выше, а также еще и из-за увеличения количества узлов;
- в-четвертых, наличие аналогового привода в составе системы управления приводит к периодическому уходу характеристик в связи с наличием аналоговых регулировок внутри привода, что повышает эксплуатационные затраты и снижает надежность робота;
- в-пятых, система управления содержит устаревшие алгоритмы управления и не позволяет использовать новые, учитывающие последние достижения в этой области, что ограничивает его функциональные и технологические возможности, а также приводит к более быстрому износу движущихся механических частей манипулятора робота.
Создание данного изобретения направлено на расширение функциональных и технологических возможностей робота и повышение его эксплуатационной надежности. Для этого промышленный робот, содержащий манипулятор с основанием и несколькими степенями подвижности, каждая из которых обеспечена посредством оси, снабженной механическим приводом и электродвигателем, установленное на манипуляторе электрооборудование и систему управления с приводом, соединенным с электродвигателями, и датчиками положения и скорости, снабжен блоком обработки данных, блоком памяти, введенным в систему управления, а также переходными устройствами и переходными валами. В качестве электродвигателей использованы синхронные электродвигатели переменного тока, установленные на осях манипулятора посредством переходных устройств и соединенные с помощью переходных валов с валами, предусмотренными в механических приводах. В качестве датчиков положения и скорости использованы встроенные в упомянутые синхронные электродвигатели переменного тока резольверы. Блок обработки данных установлен на основании манипулятора и соединен с резольверами и системой управления, привод которой выполнен цифровым. При этом блок памяти выполнен из условия обеспечения возможности введения в него динамических и кинематических параметров манипулятора в зависимости от его типа. Каждое переходное устройство выполнено в виде фланца со сквозным центральным отверстием для размещения в нем с возможностью вращения переходного вала.
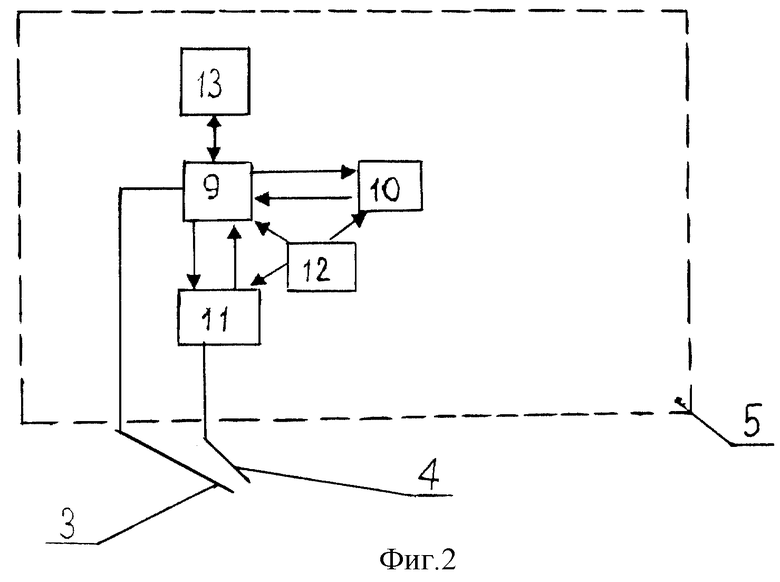
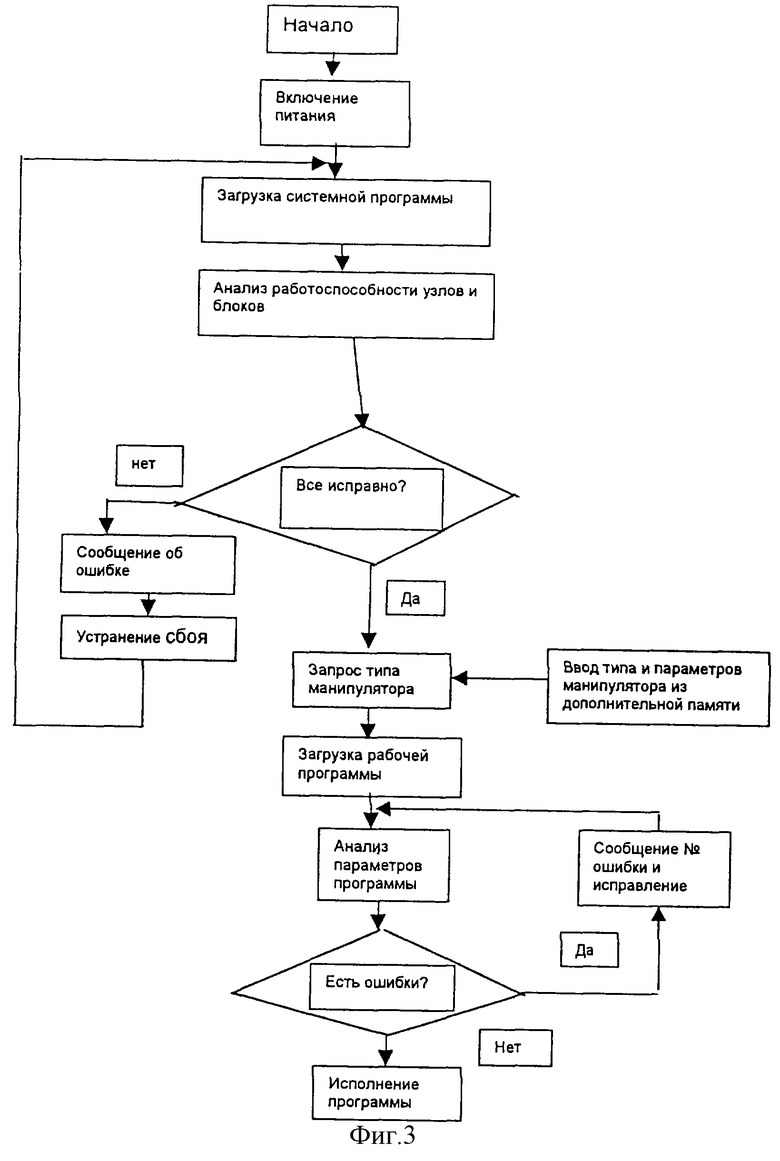
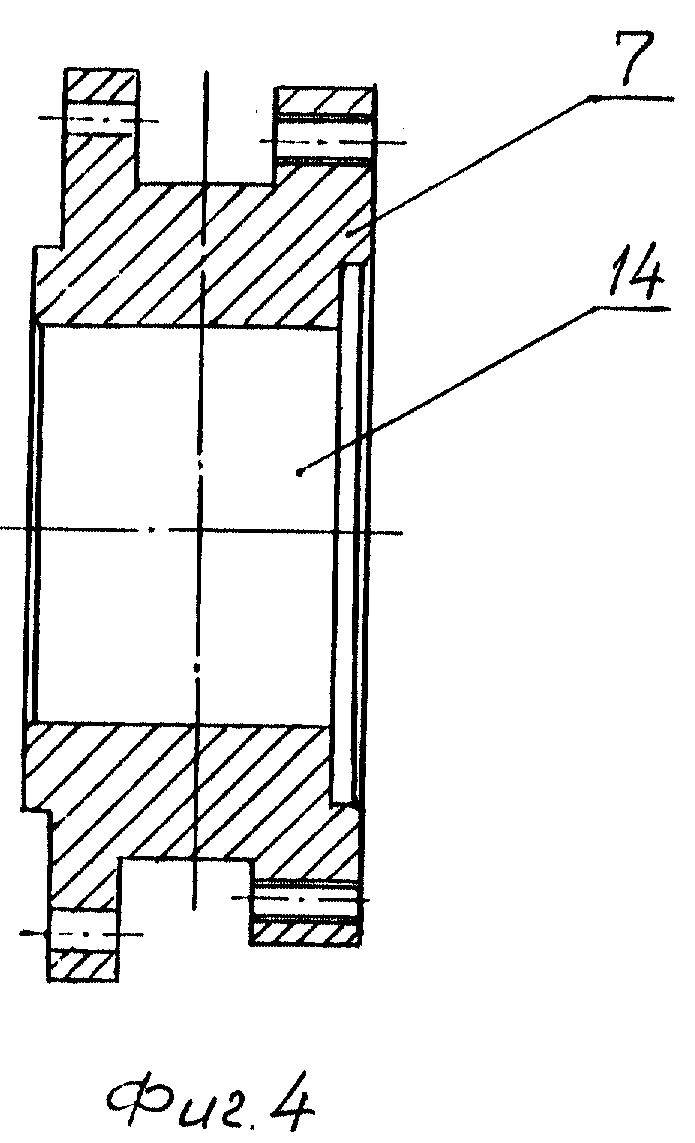
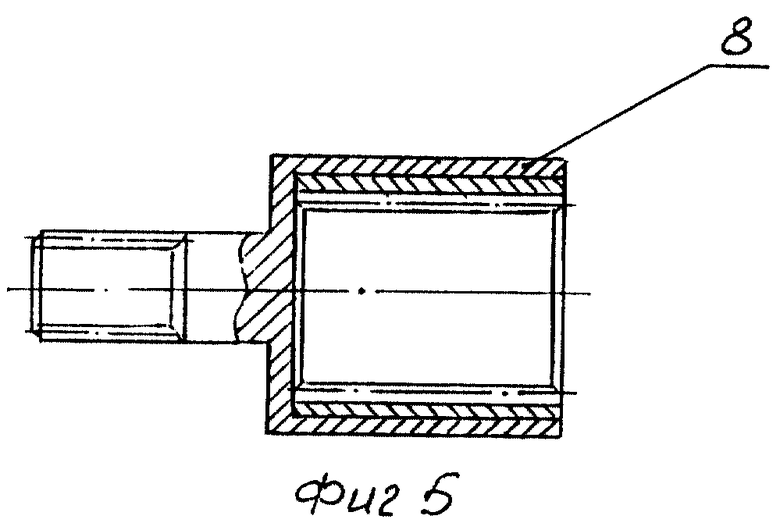
На фиг.1 изображен манипулятор заявляемого промышленного робота; на фиг. 2 - структурная схема системы управления; на фиг.3 - алгоритм управления роботом; на фиг.4 - переходный фланец для подсоединения к осям степеней подвижности робота синхронных электродвигателей переменного тока; на фиг.5 - переходный вал для сочленения валов механических приводов с валами синхронных электродвигателей переменного тока.
Промышленный робот содержит манипулятор 1 с шестью степенями подвижности, каждая из которых обеспечена посредством оси, снабженной механическим приводом (не показано) и электродвигателем 2, установленное на манипуляторе электрооборудование, включающее кабель управления 3 и кабель моторов 4, систему управления 5 и блок обработки данных 6. Электродвигатели 2 выполнены синхронными переменного тока со встроенными резольверами, используемыми в качестве датчиков положения и скорости, установлены на осях степеней подвижности манипулятора 1 с помощью переходных устройств 7 и снабжены переходными валами 8 для сочленения с валами механических приводов. Блок обработки данных 6 установлен на основании манипулятора 1 и соединен с резольверами электродвигателей 2 и с системой управления 5 (см. фиг.2), которая включает в себя блок управления 9, пульт программирования 10, привод 11, выполненный цифровым, блок питания 12 и дополнительно введенный в нее блок памяти 13, подключенный к блоку управления 9, имеющему свою память, и выполненный с возможностью введения и изменения в нем динамических и кинематических параметров манипулятора 1 робота в зависимости от его типа. Каждое переходное устройство 7 может быть выполнено, например, в виде фланца (см. фиг.4) со сквозным центральным отверстием 14, в котором устанавливается с возможностью вращения переходный вал 8.
Промышленный робот работает следующим образом.
При включении системы начинается загрузка системной программы (см. фиг. 3), после этого проводится самодиагностика узлов и блоков с целью анализа их работоспособности, при этом, если найдена неисправность, сообщается ее номер и дается возможность устранения ошибки, если ошибки не найдены, то вступает в силу дополненный вариант алгоритма, а именно: запрашивается тип манипулятора робота и после определения типа манипулятора производится автоматическая загрузка его кинематических и динамических данных из дополнительного блока памяти 13. Далее алгоритм отрабатывается без дополнительных изменений, то есть происходит загрузка выбранной рабочей программы робота, ее анализ на ошибки и исполнение. При окончании загрузки программы происходит ее исполнение роботом по получении им стартовой команды и при соблюдении условий работы при запуске. Блок управления 9 системы управления 5 роботом (фиг.2) вырабатывает заданные значения для цифрового электропривода 11 в соответствии с рабочей программой и с учетом данных блока обработки 6, при этом цифровой электропривод переменного тока 11 через кабели моторов 4 приводит в движение синхронные электродвигатели 2 переменного тока, которые в свою очередь через переходные валы 8 приводят в движение оси степеней подвижности манипулятора 1 робота. Контроль за соблюдением заданных значений производится с помощью встроенных в синхронные электродвигатели 2 переменного тока резольверов, данные от которых поступают в блок обработки данных 6 по кабелю в качестве фактических значений положения осей степеней подвижности манипулятора 1 робота. Обработанные данные от блока обработки данных 6 поступают в блок управления 9 системы управления 5 по кабелю управления 3. Ввод и отображение информации в системе управления 5 осуществляется через пульт программирования 10. Питание всех блоков системы управления 5 осуществляется блоком питания 12.
Преимуществом данного изобретения является быстрое и технологичное создание новых моделей роботов и быстрая модернизация роботов старых моделей с расширением их функциональных и технологических возможностей и увеличения их эксплуатационной надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕТОДА МАГНИТНОГО КОНТРОЛЯ | 2017 |
|
RU2684949C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ВОЛОКОННЫМ ЛАЗЕРОМ ОБЪЕМНЫХ ДЕТАЛЕЙ | 2008 |
|
RU2386523C1 |
| УСТРОЙСТВО ТОКОСЪЕМНОЕ | 2001 |
|
RU2208885C2 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ОБРАБОТКИ ОБЪЁМНЫХ ОБЪЕКТОВ | 2016 |
|
RU2623632C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2825679C1 |
Изобретение относится к робототехнике и может быть использовано при создании моделей роботов. Промышленный робот содержит манипулятор с несколькими степенями подвижности, каждая из которых обеспечена посредством оси, снабженной механическим приводом и синхронным электродвигателем переменного тока. В упомянутые электродвигатели встроены резольверы, используемые в качестве датчиков положения и скорости. Робот включает также установленное на манипуляторе электрооборудование, систему управления с цифровым приводом, соединенным с электродвигателями, и блок обработки данных. Блок установлен на основании манипулятора и соединен с резольверами электродвигателей и с системой управления. Последняя снабжена дополнительно введенным в нее блоком памяти, выполненным из условия обеспечения возможности введения в него динамических и кинематических параметров манипулятора в зависимости от его типа. Электродвигатели установлены с помощью переходных устройств и снабжены переходными валами для сочленения с валами механических приводов. В результате обеспечивается расширение функциональных и технологических возможностей и повышение его эксплуатационной надежности. 1 з.п.ф-лы, 5 ил.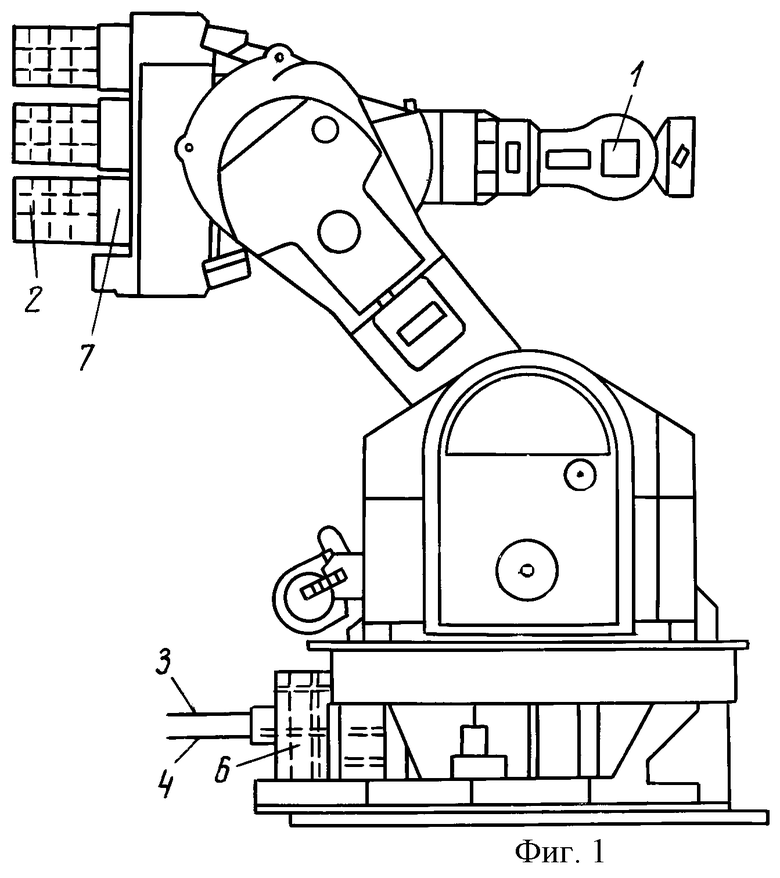
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Промышленный робот | 1988 |
|
SU1563967A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОГО ПРЕССА НА ДРУГОЙ НА ЛИНИИ ПРЕССОВАНИЯ | 1994 |
|
RU2091207C1 |
| US 4541060, 10.09.1985 | |||
| DE 3340946, 23.05.1985 | |||
| DE 3732296 A1, 31.03.1988. | |||

