1
Изобретение относится к области автоматического регулирования объек- тамн, содержащими в контуре управления звенья с запаздыванием.
Цель изобретения - расширение функциональных возможностей и упрощение настройки устройства.
На чертеже представлена структурная схема устройства,
Устройство содержит последовательно соединенные первый элемент 1 сравнения, регулятор 2 с передаточной функцией WP, первый корректирующий блок 3 с запаздыванием, имеющий пере даточную функцию W . и объект 4 управления с передаточной функцией WP, выходным сигналом X и приведенньм к выходу объекта, возмущающим воздействием Z, Устройство также содержит модель,- 5 объекта управления с передаточной функцией Wg, второй элемент сравнения, первую модель 7 корректирующего блока без запаздывания с пе- |редаточной функцией W,| , второй кор- ректирующий блок 8 с 5апаздыванием, имеющий передаточную функцию W е , вторую модель 9 второго корректирующего блока без запаздывания с передаточной функцией Wjj, ,, третий коррек- тирующий блок 10 с запаздыванием, имеющий передаточнзда функцию. Кроме того, при необходимости измерения-выходного сигнала X объекта управления и подстройки параметров передаточной ф|ункции на стороне регулятора 2 устройство имеет измерительный блок 11, подключенный к выходу второго измерительного блока 8 с sa- паздашанием, а модель 5 объекта управления связана с задатчиком 12 управляющего воздействия, выход Х, которого подключен к первому входу первого элемента 1 сравнения,.
Выход второго корректирующего- бло- .ка 8 с запаздыванием подключен к второму входу первого элемента сравнения, а выход регулятора 2 через последовательно соединенные первую модель 7 корректирующего блока без за- паздьгеания, вторую модель 9 корректирующего блока без запаздывания, второй элемент 2 сравнения и модель объекта управления связан с третьш. входом первого элемента 1 сравнения, выход первого корректируюш.его блока 3 с запаздыванием через третий корректирующий блок 10 с запаздыванием подключен к второму входу второго эле
13254032
мента 6 сравнения, а выход объекта
управления связан с входом второго корректирующего блока 8 с запаздыванием.
Устройство для компенсации запаз- дывания работает следующим образом. Статические и Д1шамрт - еские свойства системы автомат)тееского управления с данным устройством описываются следующей системой уравнений, записанной в операторной форме:
4(Р) Xo(P)-W.(P)-Y(P); Y(P) 4(Р), W - W, X(P) Wp-W,. d(P) -Z4P),(1) где d(P) - операторное изображение
сигнала ошибки, т,е, сиг- напа на выходе первого элемента 1 сравнения или на входе регулятора 2J У(Р) - операторное изображение
выходного сигнала на выходе модели 5 объекта управления ,
Для нормальной работы устройства необходимо обеспечить идентичность передаточных функций первого коррек- тируующего блока 3 без его запаздывания TI и его модели 7, т.е. W передаточной функции модели 5 объекта ,управления его собственной передаточной функции, т,е, WQ W,o; идентичность передаточных функции введенной . второй модели 9 и второго корректирующего блока 8 без его запаздывания
2.
т,е, W, Wj, а также идентичность передаточной функции введенного третьего корректирующего блока 10 с его запаздыванием и передаточной функции исходного второго корректирующего блока 8 с его запаздыванием
С,. т.е. Wv Wj, .
В этом случае преобразование системы (1) алгебраических операторных уравнений, осуществляемое методом подстановки и исключения промежуточных переменных л(Р) и У(Р), позволяет получить общую передаточную функцию системы, характеризующую в операторной форме записи связь между выходным сигналом Х(Р) объекта 4 управления с управляющим ) и возмущающим Z(P) воздействием:
ХСР) (P)+ ) -Pt,
-Х,(Р) - (Т+ WpW.WjW
)
Z(P).
, Wi ji (1 + WpW,WjW)
Отсутствие в знаменателе полученного выражения передаточной функции (2) членов, содержащих запаздывания, указывает на достигаемьй эффект его компенсации на устойчивость системы, причем обеспечивается инвариантность устойчивости к изменениям запаздывания как первого 3, так и второго 8, а также и введенного третьего 10 блоков с запаздыванием.
.При этом (в отличие от известного устройства) через второй корректирующий блок 8 с его запаздьгеанием С передается к первому (вычитающему) входу первого элемента 1 сравнения выходной сигнал X объекта 4 управления что создает возможность его оценки - измерения, например (как показано на чертеже) путем подключения соответствующего измерительного блока 11 к
13 (2
Что же касается необходимости (как и в известном устройстве) обеспечить идентичность передаточных функций
выходу второго корректирующего блока первого и второго корректирующих блоков (3 и 8) без запаздывания и их моделей (7 и 9), а также идентичность передаточной функции введенного третьего корректирующего блока 10 и пезо редаточной функции второго корректирующего блока 8, то эта задача (в отличии от задачи идентификации передаточной функций объекта управления 4 и его модели 5) практических трудностей не вызывает, так как устройства корректирующих блоков с запаздыванием отличаются высокой стабильностью их параметров, особенно если этим блокам соответствует одна и та же реальная
8. Это расширяет функциональные возможности устройства, так как позволяет вести достоверный контроль за поведением объекта 4 управления на стороне регулятора 2 и устройства задания управляющего воздействия Х системы, а также (при необходимости) производить корректировку выходного сигнала X объекта 4 управления, например, ручным или автоматическим изменением управляющего воздействия Хд.
Наличие всего лишь одной (в отли чие от известного устройства) модели
5 объекта управления существенно об35
легчает настройку устройства, сводя- 40 Физическая среда, разделяющая регулятор 2 и объект 4 управления, что . приводит к одинаковости величин запаздываний ( С, С,; с з ) и затуханий (W 1 Wj) передаваемых сигналов.
В то же время данная система с ее усовершенствованным устройством компенсации запаздьшания является в
с тцности типовой системой автоматического регулирования, реализующей прин- 50 цип управления по отклонению - сигналу ошибки, так как теперь (в отличие от известного устройства) лерез второй корректирующий блок 8 с его запаздыванием Т, на первый элемент 1
щуюся главным образом к обеспечению идентичности параметров передаточных функций Wp объекта 4 управления и Wj блока его модели 5. Это объясняется удобным, с точки зрения настрой- 45 ки, местом подключения блока модели объекта управления на стороне регулятора, что,с учетом упомянутого выше контроля за выходной координатой X объекта управления измерительным блоком 11, позволяет объективно производить корректировку параметров передаточной функции блока модели объекта управления путем воздействия на его вход подстройки, например,в функ- 55 сравнения и вход регулятора 2 посту- ции изменения управляющего воздей- пает информация о выходном сигнале X ствия .Хд , если заранее известно, что передаточная функция объекта 4 управления (например, двигателя постояннообъекта управления и потому цепь передачи через второй корректирующий блок 8 является цепью отрицательной
, , ь ооеоя, - а
1325403 2)
10
ГО тока, управляемого по цепи возбуждения) определенным образом зависит от величины управляющего воздействия Хо- Разумеется, для подстройки параметров блока модели 5 могут быть использованы и другие известные способы идентификации параметров объекта 4 управления, например, метод пробного сигнала, когда небольшим, обычно скачкообразным, изменением управляющего воздействия Хд на входе системы в сочетании с последующим наблюдением измерительным блоком 11 за динамичес- 15 кой реакцией объекта 4 управления судят о качестве протекания лереход- ного процесса в системе и при необходимости корректируют его путем подстройки параметров модели 5 объекта управления или же регулятора 2 системы.
Что же касается необходимости (как и в известном устройстве) обеспечить идентичность передаточных функций
20
а первого и второго корректирующих блозо
35
Физическая среда, разделяющая регулятор 2 и объект 4 управления, что . приводит к одинаковости величин запаздываний ( С, С,; с з ) и затуханий (W 1 Wj) передаваемых сигналов.
В то же время данная система с ее усовершенствованным устройством компенсации запаздьшания является в
с тцности типовой системой автоматического регулирования, реализующей прин- цип управления по отклонению - сигналу ошибки, так как теперь (в отличие от известного устройства) лерез второй корректирующий блок 8 с его запаздыванием Т, на первый элемент 1
сравнения и вход регулятора 2 посту- пает информация о выходном сигнале X
сравнения и вход регулятора 2 посту- пает информация о выходном сигнале X
объекта управления и потому цепь передачи через второй корректирующий блок 8 является цепью отрицательной
обратной связи системы (а не цепью ее компаундирования, как это имеет место в известной .системе). При этом реализуется основное преимущество систем с отрицательной обратной связью, за- ключающееся в том, что их статистическая точность практически не зависит от отклонений - изменений величин коэффициентов передач блоков-звеньев системы, охваченных цепью такой отри- цательной обратной связи.
Формула изобретения
15
для компенсации запазжащее задатчик управствия, подключенный к первого элемента сравоторого через последоненные регулятор и пер-20 ющий блок с запаздыва- . с входом объекта управобъекта управлен ия, корректирующего блока
ия, связанную с выходом - та сравнения.
регулятора, вт блок с запазда подключен к вт элемента сравн щееся тем рения функцион упрощения наст го введены вто щего блока без корректирующий вход которого вого корректир дыванием, а вы второго элемен торого через м ния подключен го элемента ср управления неп входом второго с запаздывание ли корректирую дывания через тирующего блок динен с вторьпу
ор Е.Папп 3106/41
Составитель В.Пешков Техред Л.Сердюкова
Кор Под
Тираж 863 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
та сравнения.
регулятора, второй корректируют; блок с запазда1ванием, выход которого подключен к второму входу первого элемента сравнения, отличающееся тем, что, с целью расши- рения функциональных возможностей и упрощения настройки устройства, в него введены вторая модель корректирующего блока без запаздывания и третий корректирующий блок с запаздыванием, вход которого подключен к выходу первого корректирующего блока с запаздыванием, а выход - к первому входу второго элемента сравнения, выход которого через модель объекта управления подключен к третьему входу первого элемента сравнения, выход объекта управления непосредственно связан с входом второго корректирующего блока с запаздыванием, а выход первой модели корректирующего блока без запаздывания через модель второго корректирующего блока без запаздывания соединен с вторьпу входом второго элеменКорректор А. Зимс)косов Подписное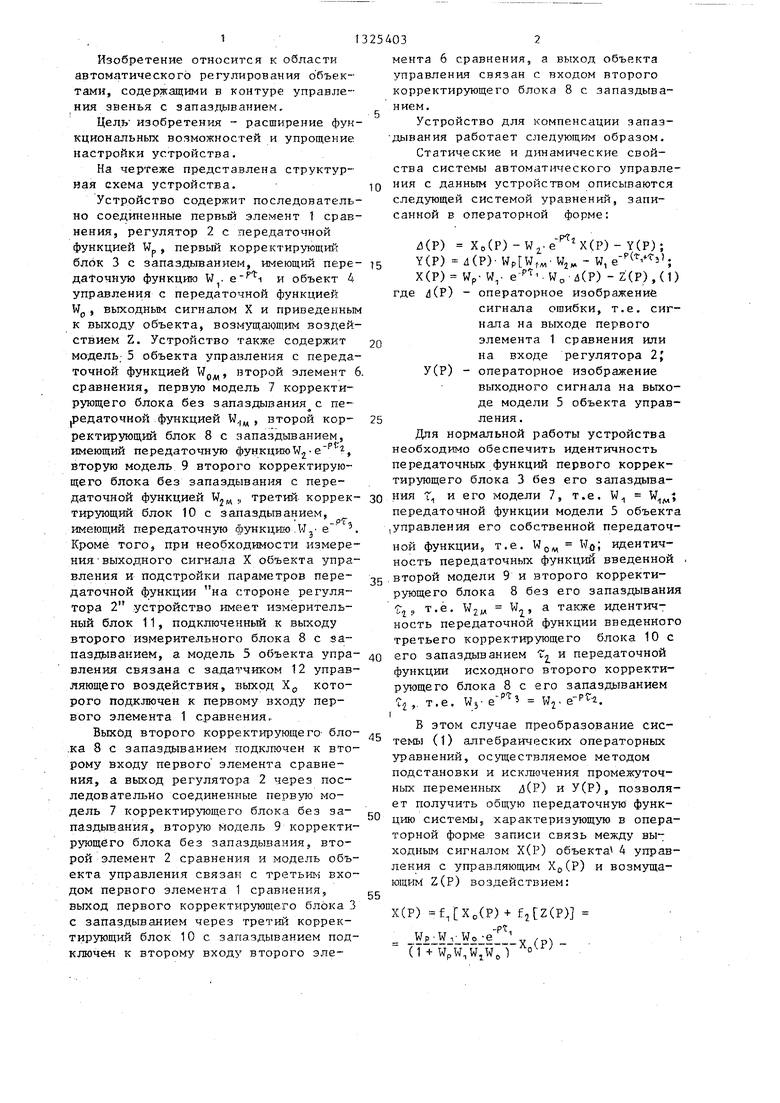

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система управления | 1979 |
|
SU832529A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| СПОСОБ КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU263016A1 |
| Регулятор с моделью объекта | 1983 |
|
SU1080118A1 |
| Система автоматического управления нестационарным объектом | 1986 |
|
SU1409967A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1986 |
|
SU1305634A1 |
Изобретение относится к автоматическому управлению объектами, содержащими в контуре управления звенья с запаздыванием. Цель изобретения - расширение функциональных возможностей и упрощение настройки устройства. За счет введения новых блоков и связей обеспечиваются достоверный контроль за правильным функционированием системы и подстройка параметров устройства на стороне регулятора, отделенного от объекта управления, например, физической средой. Устройство содержит элементы сравнения 1 и 6, регулятор 2, корректирующие блоки 3, 8 и 10 с запаздыванием, модели корректирующих блоков 7 и 9 без запаздывания, объект управления 4 и его модель 5, измерительный блок t1 и задатчик 12 управляющего воздействия. 1 ил. о со ю сд 4:i. о оэ
| СПОСОБ КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ БЫСТРОДЕЙСТВУЮЩИХ МАГНИТНЫХ УСИЛИТЕЛЕЙ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU269251A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
