Изобретение относится к тяговым системам железнодорожного электроподвижного состава (ЭПС), оснащенным асинхронными тяговыми двигателями (АТД) с короткозамкнутым ротором.
Изобретение может быть использовано в других областях техники, где требуется совместная работа нескольких указанных асинхронных двигателей на общую нагрузку.
При параллельной работе АТД в тяговых системах ЭПС ввиду высокой жесткости и всегда имеющейся неидентичности их электромеханических характеристик имеет место неодинаковое распределение нагрузок между ними (различие развиваемых двигателями мощностей). Возникающие из-за неравномерного износа бандажей колесных пар ЭПС различия их диаметров по кругу катания оказывают дополнительное влияние на рассогласование нагрузок АТД. Различие мощностей развиваемых АТД вызывает соответственно и различия моментов (сил тяги) на колесных парах ЭПС, что приводит к существенному недоиспользованию его сцепного веса. Это вынуждает принимать дополнительные меры по выравниванию (коррекции) нагрузок между АТД.
Известным способом такого выравнивания работающих на общую нагрузку АТД является использование для электропитания каждого из них напряжений с индивидуальными параметрами, получаемых от соответствующих систем энергоснабжения [1, 2, 3].
Известна система электропитания АТД, содержащая преобразователь (преобразователи) напряжения контактной сети в регулируемое напряжение постоянного тока с подключенными к его (их) выходу несколькими частотно-регулируемыми преобразователями частоты и числа фаз (ПЧФ), к каждому из которых подключен один АТД [1, 2].
Такая система электропитания позволяет подавать на разные АТД регулируемые напряжения разной частоты.
Возможность иметь на двигателях регулируемые напряжения разных частот позволяет обеспечить различные скольжения роторов разных АТД и тем самым уравнять их нагрузки. Однако необходимость применения большого, равного числу двигателей количества силовых ПЧФ существенно усложняет эту систему электропитания, а необходимость дробления ее полной мощности между отдельными ПЧФ приводит к дополнительным потерям электроэнергии.
Известна также система электропитания АТД, содержащая преобразователь напряжения контактной сети в регулируемое напряжение постоянного тока с подключенным к его выходу одним ПЧФ, к выходу которого подключен вольтодобавочный трансформатор, к разным отпайкам вторичной обмотки которого подключены несколько АТД [3].
Эта система электропитания АТД обеспечивает подачу на каждый двигатель регулируемых напряжений разной величины при одинаковой их частоте. Возможность иметь на двигателях разные по величине напряжения позволяет получать в двигателях соответствующие токи, обеспечивающие выравнивание их нагрузок.
Использование такой системы электропитания АТД позволяет сократить на ЭПС количество силовых ПЧФ до минимума и исключает необходимость дробления мощности системы электропитания между ее элементами. Это способствует повышению ее технических показателей, однако наличие в ней вольтодобавочного трансформатора задачу упрощения системы электропитания АТД решает лишь частично.
Таким образом, основанные на указанном способе известные технические решения, обеспечивающие возможность выравнивания (коррекции) нагрузок АТД, требуют обязательного применения на ЭПС дополнительных силовых преобразовательных устройств, усложняющих в большей [1], [2] или в меньшей [3] степени систему электропитания АТД. Это обстоятельство является главным недостатком как самого указанного известного способа выравнивания нагрузок, так и основанных на нем известных технических решений.
Известно также устройство для привода автономных транспортных средств [4] , содержащее общий источник электропитания и асинхронные двигатели с короткозамкнутым ротором, фазные обмотки которых разделены на равные по числу двигателей секции (части), причем секции одноименных фазных обмоток статоров двигателей объединены в связанные с источником питания параллельные группы, каждая из которых состоит из соединенных согласно и последовательно секций, принадлежащих разным двигателям.
Указанное устройство обеспечивает равенство токов во всех двигателях, однако не решает задачу выравнивания нагрузок (мощностей) на валах двигателей, так как равенство токов двигателей не является условием равенства их мощностей.
Это следует из выражения мощности Р для асинхронного двигателя [5]:
где m - число фаз двигателя;
S - относительное скольжение ротора;
I - фазный ток двигателя;
r'2 - приведенное к обмотке статора активное сопротивление обмотки ротора.
Полагая, что
мощность двигателя будет равна:
P = m•I2•r'2(S) (1a).
Учитывая, что по указанным ранее причинам параметр r'2(S) для разных двигателей имеет разное значение, мощности на валах двигателей при одинаковых токах будут также различны.
Кроме того, обязательность деления статорных обмоток на большое, равное числу двигателей, количество секций усложняет их конструкцию, а большое количество секционных выводов снижает надежность междвигательных соединений.
Задача изобретения - создание способа, обеспечивающего возможность выравнивания нагрузок АТД, получающих питание от одного ПЧФ без применения дополнительных силовых преобразовательных устройств в системах их электропитания при наличии двух одинаковых секций в фазе каждого двигателя.
Предлагаемым способом поставленная задача решается за счет использования АТД с разделенными на две равные, разноименные (четные и нечетные) части (секции) фазными обмотками, питаемыми от общего источника напряжения путем коррекции их фазных токов, выполняемой на двигателях, связанных между собой общим "электрическим валом", посредством регулирования токов в цепях, образующих указанный "электрический вал", при этом регулирование токов в указанных цепях выполняют двухполюсниками с настраиваемыми (регулируемыми) параметрами, подключаемыми пофазно на разность напряжений между парами одноименных секций, принадлежащих разным двигателям.
Таким образом, обязательными условиями реализации предлагаемого способа являются: наличие между двигателями общего "электрического вала" и возможности подключения настраиваемых (регулируемых) двухполюсников на разность напряжений между парами одноименных секций, принадлежащих одноименным фазам разных двигателей.
Возможность выравнивания нагрузок двигателей согласно предлагаемому способу основана на том, что полный фазный ток любого двигателя, работающего на общем "электрическом валу" с другими двигателями, зависит не только от тока, определяемого электромагнитными параметрами самого двигателя и параметрами цепи его электропитания, но и от тока, эквивалентного токам, определяемым взаимосвязями данного двигателя с другими.
Поэтому полный ток фазы двигателя, работающего на общем "электрическом валу", может быть представлен в виде суммы двух независимых друг от друга составляющих:
I = ICi + IЭi (2),
где I - полный ток фазы i-го двигателя;
ICi - часть полного тока фазы двигателя, определяемого его собственными параметрами и параметрами цепи его электропитания;
IЭi - часть полного тока фазы двигателя, определяемая его взаимосвязями с другими двигателями.
Из (2) следует, что изменяя только часть полного тока двигателя, а именно IЭi, можно изменять его полный ток и согласно (1) будет изменяться величина реализуемой им мощности, что обеспечивает возможность коррекции нагрузки двигателя.
Возможность регулировки тока IЭi, в предлагаемом способе обеспечивается двухполюсниками с настраиваемыми (регулируемыми) параметрами, подключенными на разность напряжений на одноименных секциях принадлежащих одноименным фазам разных двигателей. Наличие указанной разности напряжений на секциях, принадлежащим разным двигателям, вызывает ток в двухполюсниках, вследствие чего возникает возможность коррекции токов одноименных фаз разных двигателей, а следовательно, обеспечивается и необходимое регулирование реализуемых ими мощностей, в том числе и их выравнивание.
Учитывая, что предусматриваемые способом образование "электрического вала" и возможность регулирования величины токов двигателей могут быть выполнены независимо от источника их электропитания, это исключает необходимость применения в системах их электропитания каких-либо дополнительных силовых преобразовательных устройств, а то обстоятельство, что способом предусмотрено наличие только двух секций в фазе каждого двигателя и регулирование только части полных токов двигателей, позволяет использовать относительно слаботочные двухполюсники с настраиваемыми (регулируемыми) параметрами и существенно сократить количество выводов на двигателях относительно известного устройства [4].
Все эти особенности предлагаемого способа решают поставленную задачу.
В целях внесения большей ясности в сущность предлагаемого способа, на примере двухдвигательного варианта указанного известного устройства для привода автономных транспортных средств [4] рассмотрим конкретную схему его реализации.
На фиг. 1 приведена принципиальная схема включения двух (АТД1 и АТД2) асинхронных тяговых двигателей.
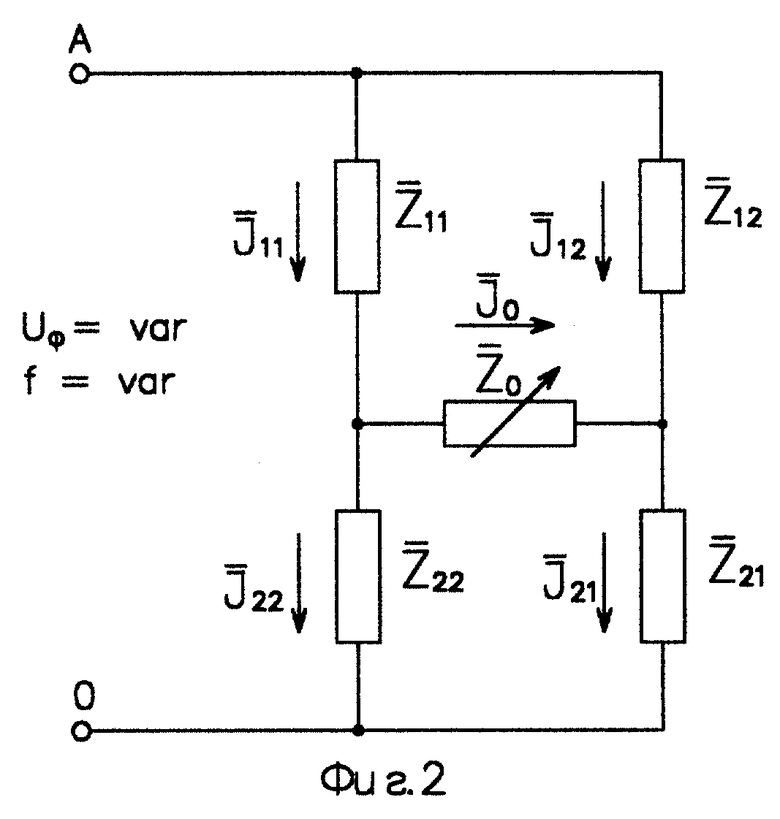
На фиг. 2 приведена эквивалентная схема замещения одной фазы включения этих двигателей.
Как видно из фиг.1, схема включения АТД содержит питаемый от контактной сети статический преобразователь 1, преобразующий ее напряжение в регулируемое по величине UЛ = var и частоте ω1 = var трехфазное напряжение и подключенные к его выходу два (АТД1 и АТД2) асинхронных тяговых двигателя 2. Фазные обмотки 3 каждого двигателя 2 состоят из двух, имеющих выводы, одинаковых, но разноименных (нечетную и четную) частей (секций). Одноименные нечетные секции двигателей АТД1 и АТД2 на фиг.1 обозначены 311 и 312, а одноименные четные секции обозначены 321 и 322. Начала всех секций обозначены знаком (*), причем начала нечетных секций непосредственно подключены к выходу преобразователя 1, а концы четных секций подвигательно объединены в две трехлучевые "звезды".
Учитывая, что условием наличия между двигателями общего "электрического вала" является хотя бы частичная общность токов двигателей, его образование в схеме осуществлено междвигательным пофазным соединением концов секций 311 с началомсекций 322, а концов секций 312 с началом секций 321. В общем случае при количестве двигателей более двух секции двигателей соединяют пофазно попарно и последовательно так, чтобы конец нечетной секции любого предыдущего двигателя был соединен с началом четной (т.е. разноименной указанной) секцией последующего, в том числе конец нечетной секции последнего двигателя группы должен быть соединен с началом четной секцией первого двигателя, то есть должны быть соединены циклически. Такой вид соединения секций двигателей является достаточным для образования общего "электрического вала" между всеми двигателями при наличии только двух секций в фазе каждого двигателя независимо от их количества, при этом напряжения между принадлежащими одной фазе смежными точками соединения секций всегда будет соответствовать разности напряжений на одноименных секциях смежных двигателей, что необходимо для реализации предлагаемого способа.
Достаточность двух секций в фазе каждого двигателя и указанный вид соединения их секций при количестве двигателей больше двух так же является отличительной особенностью по отношению к известному устройству [4].
Требуемые способом двухполюсники с настраиваемыми (регулируемыми) параметрами 4 подключены к точкам, принадлежащим одноименным фазам соединений разноименных секций 311 - 322 и секций 312 - 321, напряжение между которыми соответствует разности напряжений на одноименных секциях 311 и 312, принадлежащих разным двигателям. В качестве указанных двухполюсников 4 в рассматриваемой схеме использованы рабочие обмотки трехфазного, показанного упрощенно магнитного усилителя 5, величина индуктивного сопротивления которых регулируется током управления Iy. При необходимости двухполюсники 4 (т. е. рабочие обмотки магнитного усилителя 5) могут быть отключены находящимся в их цепи трехфазным выключателем 6.
Следует отметить, что в качестве двухполюсников с настраиваемыми (регулируемыми) параметрами 4 могут быть использованы другие устройства.
Из приведенного описания схемы видно, что она полностью соответствует предлагаемому способу.
Для более полного пояснения работы схемы, а следовательно, и реализуемого ею способа, рассмотрим представленную на фиг.2 эквивалентную схему замещения одной фазы включения двигателей.
На фиг.2 сопротивления двигателя АТД1, приведенные соответственно к параметрам обмоток секций 311 и 321, выраженные в комплексной форме, обозначены  и
и  а сопротивления двигателя АТД2, приведенные к параметрам обмоток секций 313 и 322, обозначены соответственно
а сопротивления двигателя АТД2, приведенные к параметрам обмоток секций 313 и 322, обозначены соответственно  и
и  Двухполюсник 4 с настраиваемыми (регулируемыми) параметрами на фиг.2 представлен также в комплексной форме, в виде настраиваемого (регулируемого) сопротивления
Двухполюсник 4 с настраиваемыми (регулируемыми) параметрами на фиг.2 представлен также в комплексной форме, в виде настраиваемого (регулируемого) сопротивления  где R0 и Х0 - соответственно активная и реактивная составляющие сопротивления рабочих обмоток магнитного усилителя 5. Учитывая, что секции 311 и 321 в двигателе АТД1 одинаковы, а в двигателе АТД2 одинаковы секции 312 и 322, принимая за полные приведенные сопротивления фаз двигателей АТД1 и АТД2 соответственно их значения при последовательном соединении их собственных фазных секций, будем иметь:
где R0 и Х0 - соответственно активная и реактивная составляющие сопротивления рабочих обмоток магнитного усилителя 5. Учитывая, что секции 311 и 321 в двигателе АТД1 одинаковы, а в двигателе АТД2 одинаковы секции 312 и 322, принимая за полные приведенные сопротивления фаз двигателей АТД1 и АТД2 соответственно их значения при последовательном соединении их собственных фазных секций, будем иметь:
Для подробного анализа работы представленной схемы (фиг.2) определим токи во всех ее элементах, для чего составим систему уравнений Кирхгофа, которая в комплексной форме будет иметь вид:
где U - фазное значение линейного напряжения UЛ, а индексы при токах указывают на их принадлежность к соответствующим им сопротивлениям элементов схемы.
При включении обмоток АТД в "треугольник" эквивалентная схема замещения одной фазы включения таких двигателей согласно предлагаемому способу будет полностью соответствовать схеме, представленной на фиг. 2 Однако в этом случае в системе уравнений (4) фазное напряжение U должно быть заменено на линейное напряжение UЛ.
Разрешив представленную систему уравнений (4) относительно токов в элементах схемы с учетом (3), получим:
Из (5а) и (5б) следует, что в рассматриваемой схеме токи в обеих фазных секциях каждого из двигателей равны между собой, поэтому их значения можно принять за токи соответствующих двигателей, то есть:
где  и
и  - соответственно фазные токи двигателей АТД1 и АТД 2.
- соответственно фазные токи двигателей АТД1 и АТД 2.
Учитывая (1), условием равенства мощностей АТД1 и АТД2, т.е. P1 = Р2, будет:
I1 2r' 21(S)=I2 2r'22(S) (7a)
или
С другой стороны, согласно (5а), (5б) и (6), отношение токов двигателей АТД1 и АТД2 в рассматриваемой схеме будет равно:
или
где I1 и I2 - модули фазных токов двигателей;
Z10 и Z20 - модули комплексных сопротивлений
Сопоставляя (7б) и (8б) условием равенства мощностей двигателей АТД1 и АТД2, т.е. P1 = P2, будет:
а согласно (7а), отношение их токов должно быть:
Выражая значения модулей сопротивлений  и
и  через значения модулей входящих в них сопротивлений, равенство (9) примет вид:
через значения модулей входящих в них сопротивлений, равенство (9) примет вид:
где Z1, ϕ1 и Z2, ϕ2 - соответственно модули и фазовые углы сопротивлений двигателей АТД1 и АТД 2; - модуль и фазовый угол сопротивления двухполюсника 4, в качестве которого, как было указано, в схеме использованы рабочие обмотки магнитного усилителя 5.
- модуль и фазовый угол сопротивления двухполюсника 4, в качестве которого, как было указано, в схеме использованы рабочие обмотки магнитного усилителя 5.
Из (11) следует, что при изменении величины модуля сопротивления Z0 = var путем изменения по крайней мере одной его составляющей R0 или Х0, будет меняться величина параметра С. В предельных случаях возможного регулирования Z0 значение параметра С может изменяться в пределах:
от С = Z2/Z1 при Z0 = 0 до С = 1 при Z0 = ∞,
что всегда позволяет выполнить условие (7б) и, следовательно, осуществить выравнивание (коррекцию) реализуемых двигателями АТД1 и АТД2 мощностей.
В рассматриваемой схеме получение необходимого для осуществления коррекции значения Z0 достигается изменением его реактивной составляющей Х0, путем изменения индуктивного сопротивления рабочих обмоток магнитного усилителя 5, обеспечиваемого соответствующей регулировкой его тока управления Iy.
Из (7б) и (11) так же следует, что при отключении сопротивления Z0(Z0 = ∞) фазные токи обоих двигателей будут равны (С = 1, I1 = I2) и двигатели могут реализовывать вращающие моменты, соответствующие их номинальному току. Это обстоятельство имеет самостоятельное положительное значение для работы ЭПС в условиях отсутствия ограничения по сцеплению ободов его колесных пар с рельсами, что имеет место при ведении относительно легкого преимущественно пассажирского, ЭПС. Поэтому на фиг.1 предусмотрена возможность отключения двухполюсников 4 с помощью выключателя 6.
Разрешив (10) относительно  , определим его величину в условиях равенства мощностей обоих двигателей
, определим его величину в условиях равенства мощностей обоих двигателей
В этом случае согласно (5в), проходящий через  ток будет равен:
ток будет равен:
а величина его полной сопряженной мощности составит:
Учитывая (5а), (5б) и (12), фазные токи самих двигателей в условиях равенства реализуемых ими мощностей будут соответственно равны:

а величина сопряженной полной мощности их фаз составит:
Сопоставив (13) с (15а) и (15б), получим:
а сопоставив (13) с (15а) и (15б), будем иметь:
Из (17) и (18) видно, что, например, для современных АТД с единичной полной мощностью 750-1200 кВт, различие в величинах активных сопротивлений роторов которых достигает 15% (Сmax=1,072), величина тока используемых в схеме двухполюсников не превышает нескольких процентов от номинального тока двигателей, а потребляемая ими полная мощность составит несколько десятых процента полной мощности одного двигателя.
Источники информации
1. Ротанов Н. А. и др. Электроподвижной состав с асинхронными тяговыми двигателями /Н.А. Ротанов, А.С. Курбасов, Ю.Д. Быков, В.В. Литовченко. - М.: Транспорт. - 1991. С.271-273.
2. Розенфельд В.Е., Исаев И.П., Сидоров Н.Н. Теория электрической тяги. - М.: Транспорт. - 1983. - с.188-195.
3. Конашинский А. Ю. Решение о выдаче патента на изобретение "Система группового энергоснабжения асинхронных тяговых двигателей" по заявке 99113918 (приоритет - от 24 июня 1999) от 8 декабря 2000 г.
4. Иваненко В.Н. и др. "Устройство для привода автономных транспортных средств". Описание изобретения к авторскому свидетельству СССР 1281455 А1 от 07.01.87г.
5. Вольдек А.И. Электрические машины Л.: Энергия - 1974 - 839 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГРУППОВОГО ЭНЕРГОСНАБЖЕНИЯ АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1999 |
|
RU2166441C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2314940C1 |
| СХЕМА ПИТАНИЯ ВСПОМОГАТЕЛЬНЫХ НАГРУЗОК ЛОКОМОТИВА | 2011 |
|
RU2462374C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ БЕСКОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2071608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ИНДУКТИВНОСТИ ЦЕПИ НАМАГНИЧИВАНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2420748C2 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2004 |
|
RU2283529C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ОБМОТКИ КОРОТКОЗАМКНУТОГО РОТОРА ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2386114C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374752C1 |
Использование: электроподвижной состав, оснащенный асинхронным приводом. Предложен способ группового выравнивания нагрузок асинхронных тяговых двигателей, основанный на коррекции их фазных токов за счет регулирования токов в цепях взаимосвязей между работающими на общем "электрическом валу" двигателями. Применение способа позволяет обеспечить равномерную загрузку всех тяговых двигателей (во всем диапазоне регулирования их общей нагрузки) при их электропитании общим напряжением одной частоты и упрощает систему их электроснабжения. 2 з.п.ф-лы, 2 ил.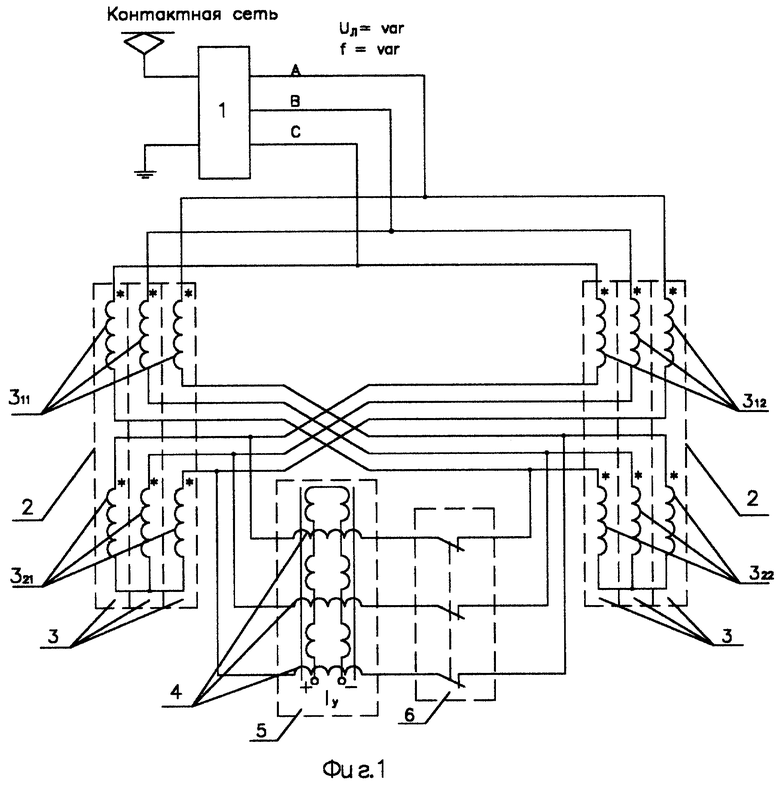
| 0 |
|
SU281526A1 | |
| Устройство для привода автономных транспортных средств | 1985 |
|
SU1281455A1 |
| US 4208620, 17.06.1980 | |||
| Способ намыва сооружений | 1984 |
|
SU1247451A1 |
| Регенеративный нагревательный колодец | 1984 |
|
SU1211317A1 |

