1
Изобретение относится к устройствам поддержани1Я горизонтальности платформы строительных -машин и может быть использовано для автоматической стабилизации го.ризоптальности платфо:рМЫ машины как при передвижении, так и при работе на вьшосных опорах, закрепленных на ходовой тележке машины.
Известные устройства, стабилизирующие гори13онтальное положение платфор.мы строительных машин, содержащие датчики продольного и понереч.ного крена, преобразователи и управляе.мые приводы опор, и.меют невысокую точность работы.
Целью изобретения явл-яется повышение точности 1поддержан;ия горизонтального положения платформы.
Дл.я этого привод опор, которькми платфор.ма опирается на ходовую тележку, выполнен в виде щаговых двигателей, управляемых через блок ком .мутации блоком управления, а датчики продольного и попере1ЧНого крена установлены я.а негоризонтируемой части .машины - ходовой тележке.
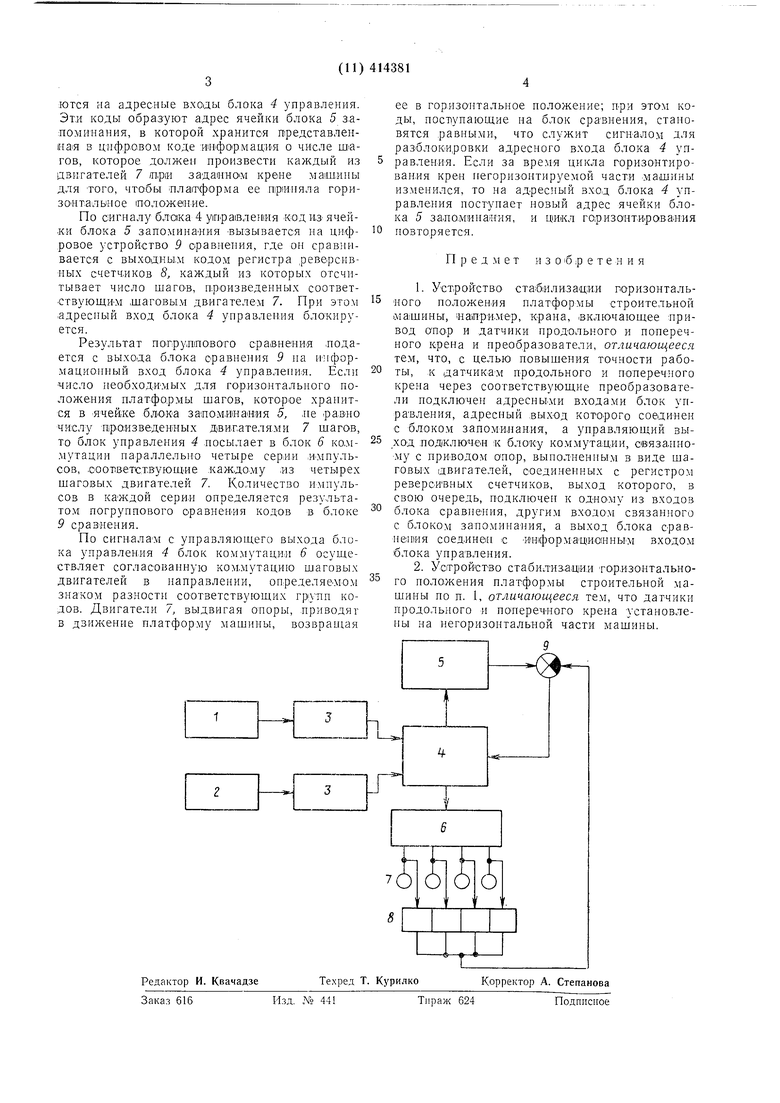
На чертеже изображена структурная схема устройства стабилизации горизонтального положения платфо/рмы строительной машины.
Устройство стабилизации состоит из датчика / иродольного крена, датчика 2 поперечного крена, установленных на негср; 3онтируемой части машины и двух преобразователей 3 на1пряже«1ие - КОД, 1подключенных к адресным входам блока 4 управления, адресный выход которого соединен с блоком 5 заламинания, а упра1вляющий -выход - с блоком 6 коммутации. К выходам блока 6 ко.м0мутации подключены шаговые двигатели 7 выдвижения опор и реверсивные счетчики 8, объединенные в единый регистр так, что код этого регистра оказывается составленным из четырех групп, соответствующих каждому лз
5 двигателей 7.
Выходы блока 5 запоминания и регистра реверсивных счетчиков 8 подключены ко входам блока сравнения 9, выход которого соединен с и 1формациоптным входом блока ул0равления.
Предложенное устройство стабилизации работает следующим образом.
При наезде ходовой тележки яа неровность или при просадке грунта под вы5носны-ми опорами, закрепленными )ia ходовой тележке и устанавливаемыми независи.мо, возникают продольный и поперечный крены мащины, значения которых измеряются датчиками 1 п 2 п преобразуются преобразователя-ми 3 в цифровые коды, которые пода
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| Датчик угла крена для вращающегося объекта | 2024 |
|
RU2822783C1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| МНОГОКАНАЛЬНЫЙ РЕГИСТРАТОР ИНТЕНСИВНОСТИИМПУЛЬСОВ | 1972 |
|
SU351186A1 |
| Устройство для регистрации режимов работы двигателя | 1983 |
|
SU1117670A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
