Изобретение относится к измерительной технике и может быть использовано для измерения малых масс в условиях невесомости, космического полета, на орбитальных космических станциях, где невозможно измерение массы на основе действия силы тяжести в земных условиях, например, для измерения результатов химических или биологических опытов.
Известно "Устройство для измерения масса тела в невесомости" [1], содержащее контейнер для размещения измеряемой массы, жестко связанный с кареткой, установленной в неподвижных относительно корпуса направляющих, пружину и блок идентификации, датчики поворота, электродвигатель и усилитель, причем датчики через усилитель подсоединены к двигателю, который соединен с одним концом пружины, а блок идентификации выполнен в виде тахогенератора, который соединен с другим концом пружины и подключен к счетчику времени, отградуированному в единицах массы.
Недостатком рассмотренного устройства является низкая точность измерения, обусловленная наличием механического трения во всех узлах - двигателе, тахогенераторе.
Известно другое "Устройство для измерения массы тела в невесомости" [2], содержащее контейнер для размещения измеряемой массы, платформу, электродвигатель и датчик положения (силоизмерительный элемент), установленный между контейнером и платформой.
Устройство позволяет измерять массу в невесомости путем сообщения контейнеру с измеряемой массой постоянного ускорения и измерения с помощью датчика положения силы инерционного воздействия контейнера на платформу, величина которой пропорциональна массе. При этом режим равноускоренного движения создается равномерным вращением платформы с помощью электродвигателя. Однако при этом поле ускорений в зоне измерений существенно неравномерно, т.к. ускорения точек измеряемой массы различны и зависят от расстояния каждой точки массы до оси вращения и направлены по радиусу, соединяющему точку массы с центром вращения. При измерении массы неравномерность поля ускорений вызывает его деформацию, что приводит к погрешности измерений.
Наиболее близким по технической сущности к предлагаемому устройству является "Устройство для измерения массы тела в невесомости" [3], содержащее контейнер для размещения измеряемой массы, платформу, каретку, первый и второй электродвигатели и датчик положения, установленный между контейнером и платформой, снабженное прямолинейными направляющими, двумя валами, с тормозной муфтой на одном на них и первым электродвигателем со стабилизированной угловой скоростью на другом, установленными перпендикулярно направляющим, гибкой нерастяжимой лентой постоянной толщины, установленной на роликах вдоль направляющих, при этом концы ленты жестко закреплены на валах и свернуты в рулоны вокруг каждого из них, платформа установлена на направляющих с возможностью продольного перемещения и жестко связана с лентой. Устройство для измерения массы в невесомости снабжено вторым электродвигателем, установленным на валу соосно с тормозной муфтой, второй тормозной муфтой, установленной на валу второго двигателя, концевыми выключателями, блоком управления, входы которого подключены к выходам концевых выключателей, а выходы - к первому и второму электродвигателям. Такое выполнение устройства для измерения массы позволяет обеспечить равномерное поле ускорений в зоне измерений массы, а следовательно, повысить точность измерения малой, нежесткой массы. Кроме того, использование в качестве привода электродвигателя со стабилизированной угловой скоростью и обеспечение равноускоренного движения платформы путем равномерного изменения радиуса шкива приводного электродвигателя при намотке на его вал нерастяжимой ленты постоянной толщины также позволяет повысить точность измерений.
В исходном положении лента намотана на катушку, приводимую во вращение электродвигателем обратной перемотки. Каретка находится в начале направляющих. Масса, которая подлежит измерению, размещается в контейнере, который через датчик положения соединен с кареткой. Затем переключатель блока управления ставится в положение "Измерение". При этом по сигналу с блока управления тормозные муфты отключаются, на первый электродвигатель подается рабочее (полное) напряжение, а на второй электродвигатель подается малое напряжение для создания подтормаживающего момента. На катушку, вращаемую с постоянной угловой скоростью первым электродвигателем, наматывается лента, при этом второй электродвигатель создает противодействующий момент, удерживая ленту в натяжении.
Поскольку при вращении катушки радиус рулона ленты возрастает линейно во времени, движение ленты и жестко связанной с ней каретки происходит с постоянным ускорением, величина которого прямо пропорциональна толщине ленты и квадрату угловой скорости вращения катушки. Под действием инерционной силы, равной произведению ускорения, с которым движется каретка, на массу контейнера, контейнер смещается относительно каретки. Величина смещения контейнера измеряется датчиком положения, установленным на каретке, и индицируется на указателе, отградуированном в единицах массы. В конце движения (по окончании процесса измерения) по направляющим каретка воздействует на концевой выключатель, сигнал с которого через блок управления снимает напряжение питания с первого и второго двигателей и включает тормозные муфты, которые фиксируют положение катушек и ленты. Для приведения устройства в исходное положение переключатель блока управления ставится в положение "Перемотка". При этом выключаются тормозные муфты, а второй двигатель запитывается рабочим напряжением.
Данное устройство позволяет обеспечить равномерное поле ускорений всех точек массы путем его поступательного движения вместе с кареткой и тем самым повысить точность измерения в условиях невесомости массы по сравнению с известными устройствами.
Недостатком устройства-прототипа является низкая точность, обусловленная наличием механического трения во всех узлах - двигателях, местах крепления катушек, роликах. Причиной, препятствующей получению более высокой точности при использовании известного устройства-прототипа, является механическая природа создания усилия, воздействующего на контейнер. Это обусловлено наличием сил трения в механических узлах.
Основной задачей, на решение которой направлено заявляемое устройство для измерения массы в невесомости, является устранение влияния сил трения.
Техническим результатом, достигаемым при осуществлении заявленного изобретения, является повышение точности измерения малых масс в невесомости.
Указанный технический результат достигается тем, что в известное устройство для измерения массы в невесомости, содержащее контейнер, с размещенной в нем измеряемой массой, блок управления и датчик положения, согласно данному изобретению введены первый и второй электромагниты, первый и второй регуляторы индукции, блок управления и последовательно соединенные задатчик идентифицирующего сигнала, детектор рассогласования, блок идентификации, индикатор, причем выход датчика положения соединен со вторым входом детектора рассогласования, второй выход задатчика идентифицирующего сигнала соединен со вторым входом блока управления, первый вход которого соединен с выходом датчика положения, а первый и второй выходы блока управления соединены с входами первого и второго регуляторов индукции, выходы которых соединены с входами первого и второго электромагнитов, а на контейнере установлены, например, две ферромагнитные шайбы.
Совокупность существенных признаков изобретения обеспечивает достижение повышения точности измерения малых масс в невесомости, достигаемого при использовании изобретения, поскольку применение электромагнитных подвесов для задания усилия и измерения перемещений в устройстве для измерения малых масс в невесомости обеспечивает бесконтактную левитацию контейнера с измеряемой массой, что позволяет устранить влияние сил трения. Бесконтактная левитация обеспечивается взаимодействием электромагнитного поля, создаваемого электромагнитами, и ферромагнитными шайбами, установленными на контейнере.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства для измерения массы в невесомости, отсутствуют; следовательно заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной наличием ее функции и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Сущность изобретения поясняется чертежами, где:
- на фиг.1 изображена функциональная схема устройства для измерения массы в невесомости;
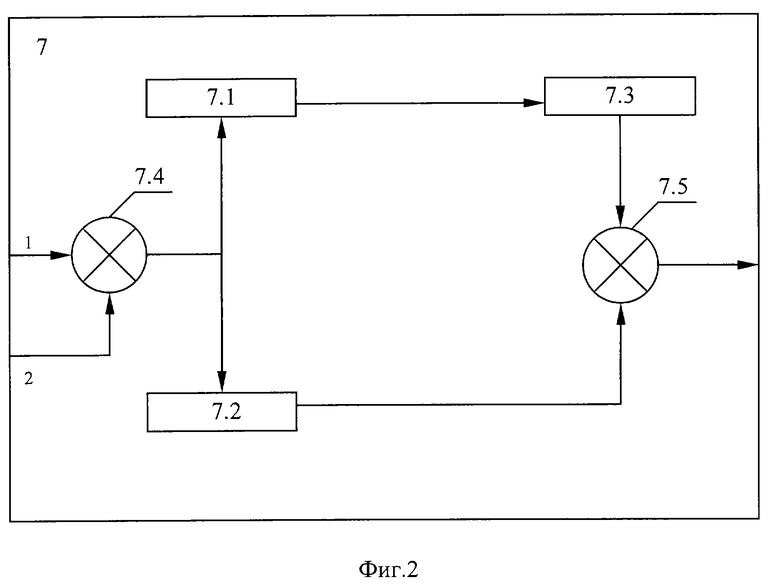
- на фиг.2 приведена блок-схема блока управления 7;
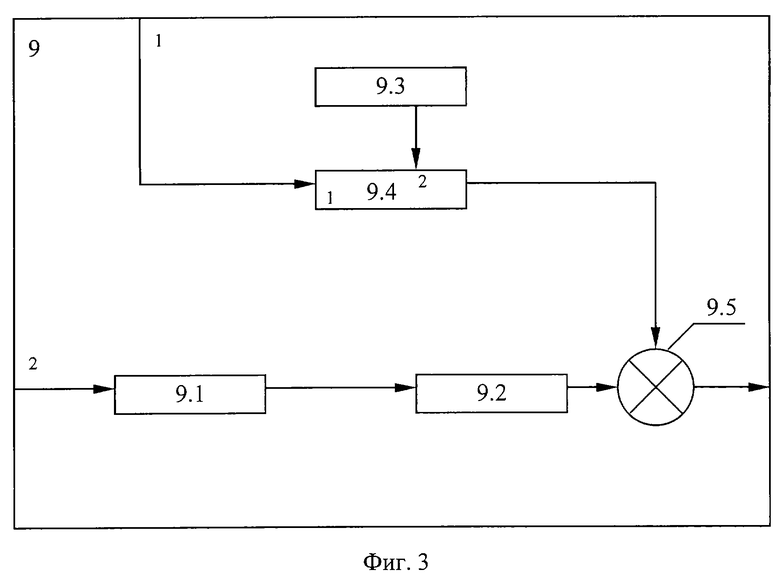
- на фиг.3 приведена блок-схема детектора рассогласования 9;
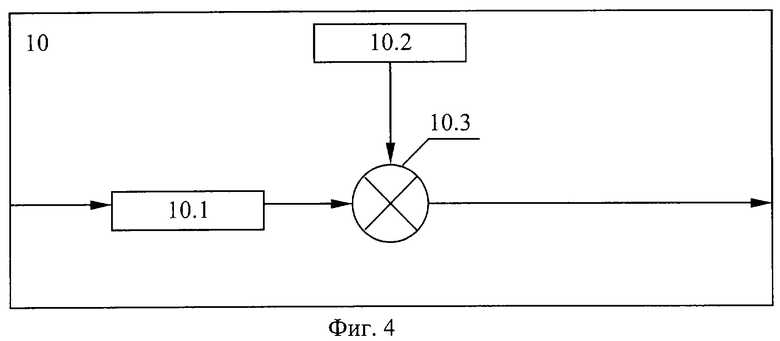
- на фиг.4 приведена блок-схема блока идентификации 10.
Устройство для измерения массы в невесомости содержит контейнер 1 для размещения измеряемой массы, с установленными на нем ферромагнитными шайбами (на чертеже не показаны), в рассматриваемом случае их две, но может быть произвольное количество, в зависимости от требуемых точностных характеристик, датчик положения 2, первый 3 и второй 4 электромагниты, первый 5 и второй 6 регуляторы индукции, блок управления 7 и последовательно соединенные задатчик идентифицирующего сигнала 8, детектор рассогласования 9, блок идентификации 10, индикатор 11, причем выход датчика положения 2 соединен со вторым входом детектора рассогласования 9, второй выход задатчика идентифицирующего сигнала 8 соединен со вторым входом блока управления 7, первый вход которого соединен с выходом датчика положения 2, а первый и второй выходы блока управления 7 соединены с входами первого 5 и второго 6 регуляторов индукции, выходы которых соединены с входами первого 3 и второго 4 электромагнитов.
Контейнер 1 может быть выполнен, например, из алюминиевого сплава в виде бруска квадратного сечения, в котором предусмотрены отверстия для размещения измеряемой массы.
Датчик положения 2 может быть реализован, например, в виде индукционного, оптического, доплеровского измерителя скорости. Оптические датчики состоят из источника света, который освещает контейнер 1 и создает светотеневую картину на фотодиодах [6, 7]. Электромагниты 3 и 4 выполнены в виде катушек, намотанных на стальные сердечники.
Каждый из регуляторов индукции 5 и 6 состоит из блока перемножения, блока сложения и блока вычитания [8].
Блок управления 7 состоит из первого и второго блоков перемножения на заданные коэффициенты 7.1 и 7.2, блока дифференцирования 7.3, первого и второго блоков сложения 7.4 и 7.5. Первый и второй входы блока управления соединены с первым блоком сложения 7.4. Выход первого блока сложения 7.4 соединен с первым и вторым блоками перемножения 7.1 и 7.2, выходы которых соединены с вторым блоком сложения 7.5 [7].
Блок задатчика идентифицирующего сигнала 8 может быть выполнен, например, в виде генератора синусоидального сигнала или генератора прямоугольных импульсов [7].
Детектор рассогласования 9 выполнен в виде амплитудного детектора, состоящего из запоминающего устройства 9.2, первого и второго блоков сравнения 9.1 и 9.4, блока сложения 9.5 и блока источника заданного значения 9.3. Второй вход блока детектора рассогласования 9 соединен с первым блоком сравнения 9.1, выход которого соединен с запоминающим устройством 9.2, выход которого соединен с первым входом блока сложения 9.5. Первый вход детектора рассогласования 9 соединен со вторым блоком сравнения 9.4, второй вход которого соединен с выходом блока источника заданного значения 9.3. Выход второго блока сравнения 9.4 соединен со вторым входом блока сложения 9.5, выход которого является выходом детектора рассогласования 9 [5].
Блок идентификации 10 состоит из блока деления 10.1, блока источника заданного значения 10.2 и блока вычитания 10.3. Вход блока идентификации 10 соединен с блоком деления 10.1, выход которого соединен с блоком вычитания, второй вход блока вычитания соединен с блоком источника заданного значения 10.2.
Индикатор 11 может быть выполнен в виде матрицы на жидких кристаллах или в виде электронно-лучевой трубки.
Устройство для измерения массы в невесомости работает следующим образом.
В контейнер 1 с ферромагнитными шайбами помещают измеряемую массу mi. Ферромагнитные шайбы взаимодействуют с магнитным полем, создаваемым первым 3 и вторым 4 электромагнитами, обеспечивая левитацию контейнера и создание бесконтактного силового воздействия на контейнер 1.
С блока задатчика идентифицирующего сигнала 8 подается тестовый сигнал на второй вход блока управления 7, который обеспечивает заданные динамические свойства системы, реализуя пропорционально-дифференциальный закон управления. На первый вход блока управления 7 подается сигнал с датчика положения 2. Сигнал, снимаемый с датчика положения 2, пропорционален перемещению контейнера 1.
Сигналы, поступившие на первый и второй входы блока управления 7, суммируются в блоке сложения 7.4 и поступают на воды первого 7.1 и второго 7.2 блоков перемножения, с выхода второго блока перемножения 7.2 сигнал поступает на блок дифференцирования 7.3. Сигналы с выхода первого блока перемножения 7.1 и блока дифференцирования 7.3 поступают на блок сложения 7.5, где суммируются и поступают на первый 5 и второй 6 регуляторы индукции.
Первый 5 и второй 6 регуляторы индукции обеспечивают постоянство индукции в зазоре между ферромагнитными шайбами, прикрепленными к контейнеру, и первым 3 и втором 4 электромагнитами. Это обеспечивается тем, что сигнал, поступающий с блока управления 7 на первый регулятор индукции 5, складывается с заданной величиной, а сигнал, поступающий с блока управления 7 на второй регулятор индукции 6, вычитается из заданной величины. Таким образом, сумма выходных сигналов с первого 5 и второго 6 регуляторов индукции является постоянной величиной. Сигналы с первого 5 и второго 6 регуляторов индукции поступают на первый 3 и второй 4 электромагниты. Ток, возникающий в первом 3 и втором 4 электромагнитах, бесконтактно передает заданное усилие на ферромагнитные шайбы контейнера 1. Таким образом контейнеру 1 сообщается тестовое усилие. Масса нетто контейнера 1 в этом случае равна mn, а масса брутто - сумме масс mn и mi.
Датчик положения 2 фиксирует перемещение контейнера 1, который сместился под действием приложенной бесконтактно со стороны первого 3 и второго 4 электромагнитов силы. Сигнал с датчика положения 2 поступает на блок управления 7 и детектор рассогласования 9.
Блок управления 7, за счет задания коэффициентов первого 7.1 и второго 7.2 блоков перемножения, обеспечивает заданные динамические свойства устройства, или автоколебательный режим, или режим вынужденных колебаний с параметрами, задаваемыми блоком задатчика идентифицирующего сигнала 8. Блок задатчика идентифицирующего сигнала 8 задает следующие параметры - период, фазу и амплитуду сигнала, поступающего на второй вход блока управления 7. В качестве такого сигнала может быть использован синусоидальный сигнал.
На блок детектора рассогласования 9 одновременно поступает сигнал с датчика положения 2 и с блока задатчика идентифицирующего сигнала 8. Детектор рассогласования 9 определяет амплитуду сигнала, поступающего с датчика положения 2. Сигнал, поступающий на второй вход детектора рассогласования 9 с датчика положения 2, сравнивается в блоке сравнения 9.1 с содержимым блока запоминания 9.2, и если величина, поступившая на второй вход детектора рассогласования 9 с датчика положения 2, больше чем величина, хранящаяся в блоке запоминания 9.2, то в блок запоминания 9.2 записывается величина, поступившая на второй вход детектора рассогласования 9 с датчика положения 2. Начальное значение блока запоминания 9.2 составляет в момент включения устройства нулевое значение. На первый вход детектора рассогласования 9 поступает сигнал с задатчика идентифицирующего сигнала 8 и сравнивается во втором блоке сравнения 9.4 с заданной величиной, поступившей с блока источника заданного значения 9.3. В случае отличия поступившего на первый вход блока детектора рассогласования 9 сигнала от заданного значения, детектор рассогласования 9 выдает сигнал ошибки на блок идентификации 10. Сигналы с второго блока сравнения 9.4 и блока запоминания 9.2 суммируются в блоке сложения 9.5 и поступают на выход блока детектора рассогласования 9. С блока детектора рассогласования 9 сигнал поступает на блок идентификации 10 и далее на блок индикации 11.
В случае использования режима автоколебаний или вынужденных колебаний с тестовой амплитудой An, детектор рассогласования 9 по информации, поступающей с датчика положения 2, определяет действующую амплитуду колебаний контейнера 1, обозначаемую Аb.
Тогда измеряемая масса mi определяется в блоке идентификации 10 из выражения:
mi=k/Ab-mn. (1)
В случае, когда контейнер 1 не содержит измеряемой массы, то имеют место равенства Ab= An и mi=0, т.к. k/An =mn, где k - коэффициент пропорциональности, который необходимо определить экспериментально.
Тестовая сила F определяется с высокой точностью по напряжениям, приложенным к электромагнитам 3, токам в электромагнитах и по координатам положения контейнера 1. Поэтому масса mi определяется не только по формуле (1), но и по уравнению
mi=F/a-mn, (2)
где а - ускорение, с которым движется контейнер, определяемое датчиком положения 2.
Сигнал, поступивший на вход блока идентификации 10, делит заданную величину в блоке деления 10.1, из результата деления в блоке вычитания 10.3 вычитается величина, поступающая из блока источника заданного значения 10.2. Блок идентификации 10 определяет измеряемую массу согласно выражениям (1) и (2) и посылает эту информацию на индикации 11 для отображения.
Как следует из вышеизложенного, достижение повышения точности измерения малых масс в невесомости обеспечивается применением магнитного подвеса для исключения влияния сил трения. Сопоставление параметров, характеризующих заявленное изобретение и прототип, позволяет сделать вывод, что в заявленном изобретении достигается более высокая точность измерения малых масс.
Кроме указанного достигаемого технического результата и преимуществ заявленного устройства следует отметить также дополнительные его достоинства, связанные с повышением надежности устройства, обусловленные отсутствием механического контакта частей устройства между собой.
Таким образом приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в измерительной технике, а именно при проведении химических и биологических опытов на космических станциях;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Авторское свидетельство СССР 518639, кл. G 01 G 19/00, 1974.
2. Авторское свидетельство СССР 550918, кл. G 01 G 9/00, 1975.
3. Авторское свидетельство СССР 1091685, кл. G 01 С 9/00, 1982 (прототип).
4. Красовский А.А. Справочник по теории автоматического управления. М.: Машиностроение, 1987, 711 с.
5. Богословский С. В. Теория и практика аэромагнитного моделирования. СПб.: ГУАП, 1998, 140 с.
6. Котенко Г. И. Гальваномагнитные преобразователи. Л.: Энергия, 1982, 104 с.
7. Сосновский А.А., Хаймович И.А. Авиационная радионавигация. М., Транспорт, 1980 г., 255 с.
8. Кизимов А.Т., Беляков Н.Н., Лебедев А.Н. Динамические ошибки датчиков параметров движения на основе электромагнитного подвеса. // Датчики в информационно-измерительных системах. Ижевск: ИжМИ, 1984, с. 70-74.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ В НЕВЕСОМОСТИ | 2002 |
|
RU2207520C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ МАССЫ В НЕВЕСОМОСТИ | 2002 |
|
RU2239796C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| Измерительная электромеханическая система | 2022 |
|
RU2797501C1 |
| АНАЛИЗАТОР СПЕКТРА СИГНАЛОВ ОПТИЧЕСКОГО ДИАПАЗОНА | 2003 |
|
RU2239802C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ИНДУКЦИИ | 1996 |
|
RU2117310C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2103718C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения малых масс в условиях невесомости, космического полета. Устройство содержит контейнер с размещенной в нем измеряемой массой, блок управления, датчик положения, первый и второй электромагниты, первый и второй регуляторы индукции, блок управления. Устройство также содержит последовательно соединенные задатчик идентифицирующего сигнала, детектор рассогласования, блок идентификации, индикатор. Выход датчика положения соединен со вторым входом детектора рассогласования, второй выход задатчика идентифицирующего сигнала соединен со вторым входом блока управления, первый вход которого соединен с выходом датчика положения, а первый и второй выходы блока управления соединены с входами первого и второго регуляторов индукции, выходы которых соединены с входами первого и второго электромагнитов. На контейнере установлены ферромагнитные шайбы. Технический результат: повышение точности измерения. 4 ил.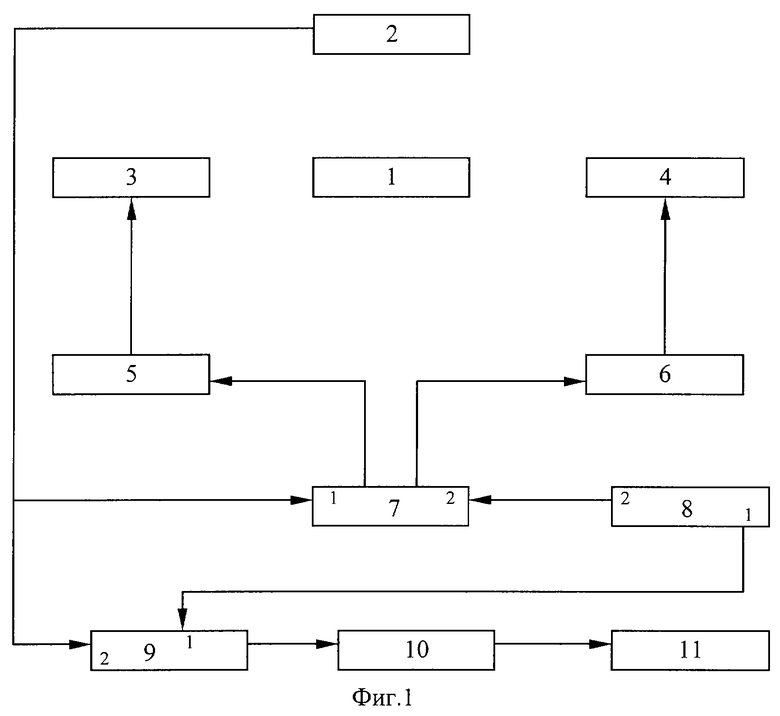
Устройство для измерения массы в невесомости, содержащее контейнер, с размещенной в нем измеряемой массой, блок управления и датчик положения, отличающееся тем, что устройство дополнительно содержит первый и второй электромагниты, первый и второй регуляторы индукции, блок управления и последовательно соединенные задатчик идентифицирующего сигнала, детектор рассогласования, блок идентификации, индикатор, причем выход датчика положения соединен со вторым входом детектора рассогласования, второй выход задатчика идентифицирующего сигнала соединен со вторым входом блока управления, первый вход которого соединен с выходом датчика положения, а первый и второй выходы блока управления соединены с входами первого и второго регуляторов индукции, выходы которых соединены с входами первого и второго электромагнитов, а на контейнере установлены, например, две ферромагнитные шайбы.
| SU 1091685 A1, 20.05.1983 | |||
| SU 550918 A1, 09.03.1977 | |||
| Прибор для измерения массы тела в невесомости | 1974 |
|
SU518639A1 |

