Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока на базе асинхронного электродвигателя с фазным ротором и трехфазным импедансом (индукционным пусковым резистором) в роторной цепи, преимущественно для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей.
Известен способ управления (SU 646800, 15.04.1980), при котором фактические напряжения ротора преобразуют в опорные напряжения пилообразной формы с постоянными амплитудами и длительностью, равной половине периода напряжения ротора. При фазовом управлении пульсации момента получаются минимальными.
Однако при этом способе исчезает эффект параметрической стабилизации скорости и техническое исполнение получается очень сложным.
Наиболее близким к изобретению и принятым за прототип является способ управления асинхронным электродвигателем с фазным ротором (патент RU 2202850, МПК 7 Н02Р 5/40, опубликован 20.04.2003. Бюл. №11). Способ основан на получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента.
Однако при этом способе сложная форма опорного напряжения не обеспечивает равномерное изменение угла регулирования при увеличении нагрузки, что приводит к нелинейным механическим характеристикам при регулировании скорости и ограничивает величину момента значениями, меньшими, чем возможно в схеме с включенными импедансами.
В основу изобретения положена техническая задача, заключающаяся в исключении импульсного режима регулирования скорости, повышении жесткости механической характеристики и создании возможности изменения жесткости механической характеристики.
Указанная техническая задача решается тем, что в способе управления асинхронным электродвигателем с фазным ротором, при котором устанавливают напряжение задания скорости электропривода для тиристора или симистора каждого контура цепи фазного ротора, включают в заданный момент времени тиристор или симистор каждого контура цепи фазного ротора, согласно изобретению одновременно устанавливают напряжение, задающее жесткость механической характеристики, определяют продолжительность полуволны напряжения на кольцах ротора, рассчитывают угол управления в функции значений напряжений задания скорости, жесткости и обратной связи и на основе этого определяют момент времени формирования управляющего импульса и формируют его при положительной полуволне напряжения на кольцах ротора для включения тиристора или симистора каждого контура цепи фазного ротора.
Особенностью способа является введение напряжения задания скорости электропривода UЗ, напряжения UЖ, задающего жесткость механической характеристики и обеспечивающего регулирование жесткости механической характеристики, расчет продолжительности полупериода напряжения на кольцах ротора tПВ, а также расчет коэффициента соотношения напряжений КU, угла управления α и момента включения tВКЛ каждого тиристора или симистора по формулам (1)-(3), обеспечивающее линейное регулирование угла управления тиристора или симистора в диапазоне от 0 до 180° при изменении нагрузки на валу электродвигателя, существенно повышая жесткость механической характеристики, а при больших нагрузках полностью открывая тиристоры или симисторы, обеспечивая при этом выход на характеристику с импедансами, соединенными накоротко в звезду.



За счет введения напряжения задания скорости электропривода и напряжения, задающего жесткость, а также расчета точного значения угла управления тиристоров повышается жесткость механических характеристик. Так как полученное значение угла управления прямо пропорционально напряжению задания скорости электропривода, то обеспечивается линейность механических характеристик при регулировании скорости. За счет изменения напряжения жесткости появляется возможность изменения жесткости механических характеристик.
В прототипе для полного открытия тиристоров или симисторов необходимо значительное падение скорости и поэтому электропривод никогда не выходит на естественную дроссельную характеристику, а сама характеристика имеет существенную нелинейность, особенно при больших нагрузках. Сущность изобретения поясняется чертежами:
На фиг.1 представлена функциональная схема, поясняющая способ управления асинхронным электродвигателем с фазным ротором.
На фиг.2 - диаграммы, поясняющие работу рассматриваемой схемы при разных статических моментах, выполненной по схеме фиг.1, где Uab - напряжение на кольцах ротора между фазами А и В, UУВП - напряжение на выходе блока выделения положительного напряжения, МСТ - статический момент на валу асинхронного электродвигателя, UОС - напряжение на выходе блока обратной связи, UЗ - напряжение задания скорости электропривода, UЖ - напряжение задания жесткости механической характеристики, КU - коэффициент угла управления тиристора или симистора, UУИ - напряжение на выходе формирователя управляющих импульсов, UVS1 - напряжение на тиристоре или симисторе, включенном между фазами А и В.
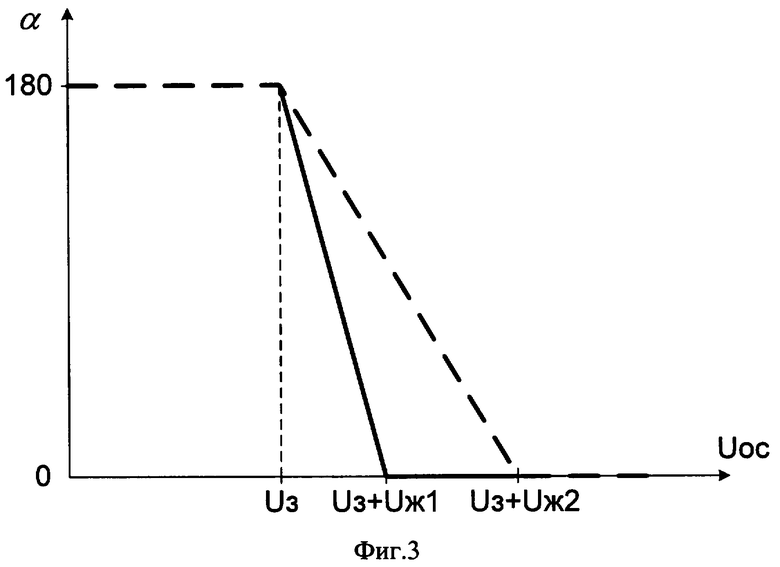
На фиг.3 - регулировочная характеристика α=f(UОС).
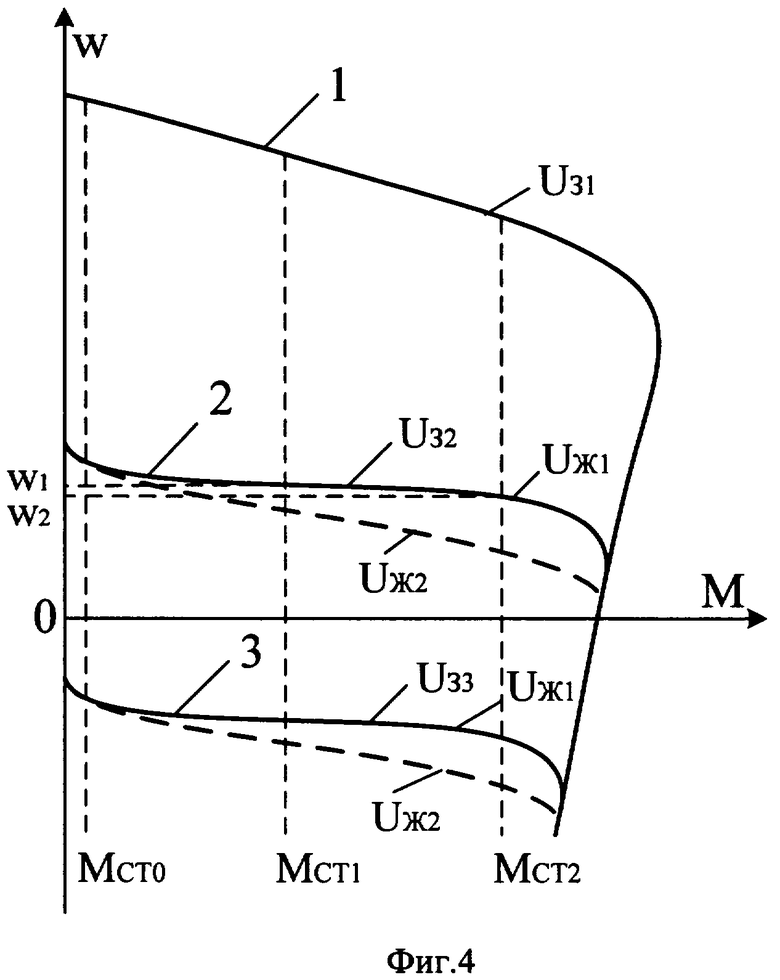
На фиг.4 - механические характеристики, при этом характеристика 1 соответствует схеме с импедансами, соединенными накоротко в звезду, характеристика 2 соответствует пониженной скорости в двигательном режиме, характеристика 3 соответствует пониженной скорости в режиме торможения противовключением.
Осуществление способа поясняется с помощью функциональной схемы фиг.1.
Пояснения работы схемы по формированию управляющих импульсов даны на диаграммах фиг.2.
Принцип управления тиристорами или симисторами достаточно пояснить на примере работы системы управления одним тиристором или симистором. На фиг.2 показаны диаграммы управления тиристором или симистором, подключенным между фазами А и В ротора электродвигателя при разных статических моментах.
К кольцам ротора асинхронного электродвигателя 1 подключены (фиг.1) трехфазный импеданс (индукционный пусковой резистор) 2, блок тиристоров БТ 3, блок обратной связи ОС 4, выпрямляющий и фильтрующий напряжение на кольцах ротора, блок определения продолжительности положительной полуволны БОТ 5 и узел выделения положительной полуволны УВП 6 соответственно для каждой фазы. Выходное напряжение блока УВП формируется только при положительной полярности напряжения на кольцах ротора. Выходные напряжения UОС и UБОТ соответственно с блоков ОС и БОТ подаются на первый и второй входы блока расчета угла управления БРУ 7, на третий и четвертый входы которого подаются с блока задания напряжений БЗН 8, получающего напряжение с выхода источника питания ИП 9, напряжение задания скорости электродвигателя UЗ и напряжение жесткости UЖ, позволяющее регулировать жесткость механических характеристик электропривода. В блоке БРУ производится расчет угла управления α тиристора или симистора по формулам (1)-(3). На выходе блока БРУ формируется импульс, совпадающий с рассчитанным углом управления. Выходные сигналы с блока БРУ и блока УВП поступают на первый и второй входы формирователя управляющих импульсов ФУИ 10. Блок ФУИ формирует управляющее напряжение UУИ, поступающее на управляющий электрод тиристора или симистора для каждой фазы соответственно. Передний фронт управляющего импульса определяется углом управления α, рассчитанным в блоке БРУ, а задний фронт - моментом смены знака напряжения с колец ротора с положительного на отрицательный, определяемым блоком УВП.
На холостом ходу (статический момент MСТ1 на валу электродвигателя мал) электродвигателя напряжение UОС (фиг.2а) мало и угол управления α равен 180° (фиг.2а, 3), при этом тиристоры или симисторы полностью закрыты. При увеличении статического момента (нагрузки) на валу электродвигателя до величины МСТ2 (фиг.2б) его скорость уменьшается, что приводит к увеличению частоты и амплитуды напряжения на кольцах ротора Uab, а следовательно, и к увеличению UОС. При превышении напряжением UОС заданного напряжения UЗ угол управления α линейно изменяется. При дальнейшем увеличении статического момента (МСТ3 на фиг.2в) напряжение UОС превышает уровень суммы напряжений UЗ+UЖ, угол управления α становится равным нулю (фиг.3). Электродвигатель при этом работает с импедансами, закороченными в звезду с помощью полностью открытых тиристоров или симисторов.
Рассматриваемому способу управления соответствуют регулировочные характеристики, представленные на фиг.3. При UОС<UЗ угол управления α равен 180°, то есть тиристоры или симисторы полностью заперты, при UОС>UЗ+UЖ угол управления α равен 0°, то есть тиристоры или симисторы полностью открыты и электродвигатель работает при полностью включенных импедансах в роторную цепь. Штриховая характеристика соответствует режиму регулирования при напряжении UЖ2, большем UЖ1.
На фиг.4 даны механические характеристики рассматриваемого электропривода. Характеристика 1 соответствует случаю полностью открытых тиристоров или симисторов. Характеристика 2 соответствует работе электропривода на пониженной скорости в двигательном режиме, а характеристика 3 - работе двигателя в режиме торможения противовключением. В результате точного расчета угла управления с помощью рассматриваемого способа управления механическая характеристика более жесткая, чем характеристика 1. При больших значениях статического момента тиристор или симистор полностью открывается и характеристика совпадает с характеристикой 1.
При изменении напряжения UЖ меняется жесткость механических характеристик. На фиг.3 напряжению UЖ2, большему чем UЖ1, соответствуют более мягкие механические характеристики U32' и U33'.
Благодаря линейной зависимости угла управления механические характеристики имеют линейный характер. В прототипе опорные напряжения формируются из кусков синусоид и потому линейность механических характеристик не может иметь места. Кроме того, у прототипа при росте амплитуды опорной синусоиды угол управления α уменьшается, но стать равным нулю не может и достичь максимально возможного значения электромагнитного момента, ограниченного характеристикой 1, не может.
Схема фиг.1 успешно испытана в лаборатории на электродвигателе 3.5 кВт.
Так как опорное напряжение, формируемое в прототипе из кусков синусоид, заменяется напряжением задания UЗ и жесткости UЖ, производится расчет по формулам (1)-(3) значения угла управления α, зависящим линейно от величин напряжения задания UЗ, напряжения обратной связи UОС и напряжения жесткости UЖ, то угол управления α линейно изменяется при изменении нагрузки на валу двигателя.
Таким образом, способ позволяет повысить жесткость механических характеристик, обеспечить их линейность и возможность изменения их жесткости.
Реализация предлагаемого способа позволит создать простые, доступные неквалифицированному обслуживанию электроприводы, преимущественно крановых механизмов, с получением ползучих скоростей при малых пульсациях момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2300169C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2408973C1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Устройство для регулирования частоты вращения асинхронного двигателя с фазным ротором | 1985 |
|
SU1339856A1 |
| Электропривод переменного тока | 1988 |
|
SU1539952A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1977 |
|
SU758453A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА СЕЛЬСКОХОЗЯЙСТВЕННОГО МЕХАНИЗМА ОТ РАБОТЫ В АВАРИЙНЫХ РЕЖИМАХ | 1994 |
|
RU2074471C1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока на базе асинхронного электродвигателя с фазным ротором и трехфазным импедансом (индукционным пусковым резистором) в роторной цепи, преимущественно для крановых механизмов подъема и передвижения, требующих получения пониженных (ползучих) скоростей. Технический результат заключается в получении эффекта параметрической стабилизации скорости при ограничении пульсаций момента. В способе управления момент включения тиристоров или симисторов рассчитывают, используя значения напряжения, задающего скорость электропривода, напряжения, задающего жесткость механической характеристики, напряжения обратной связи и время полупериода напряжения на кольцах ротора. Включают тиристоры или симисторы в определяемые таким образом моменты. Для каждого тиристора или симистора момент включения определяют независимо от остальных. 4 ил.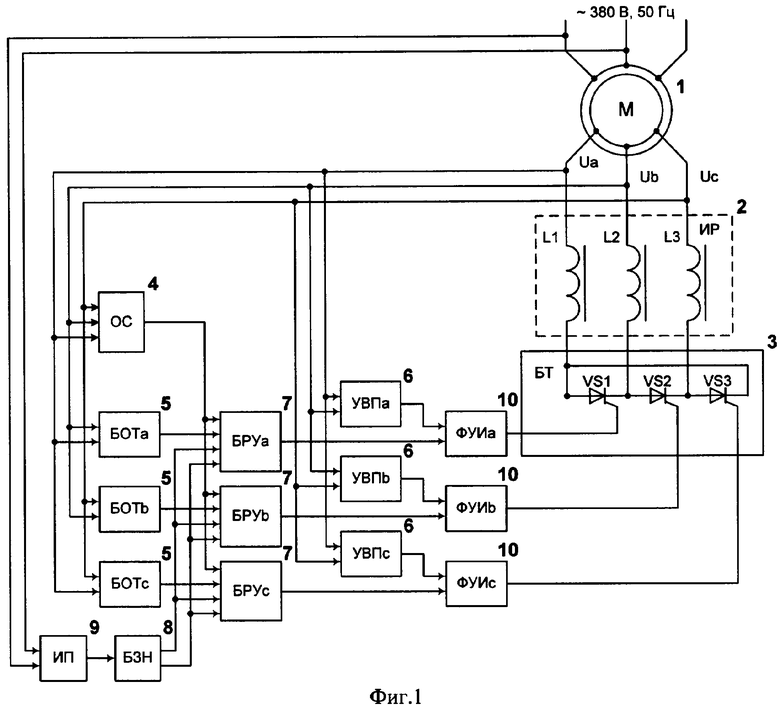
Способ управления асинхронным электродвигателем с фазным ротором, при котором устанавливают напряжение задания скорости электропривода для тиристора или симистора каждого контура цепи фазного ротора, включают в заданный момент времени тиристор или симистор каждого контура цепи фазного ротора, отличающийся тем, что одновременно устанавливают напряжение, задающее жесткость механической характеристики, определяют продолжительность полуволны напряжения на кольцах ротора, рассчитывают угол управления в функции значений напряжений задания скорости, жесткости и обратной связи и на основе этого определяют момент времени формирования управляющего импульса и формируют его при положительной полуволне напряжения на кольцах ротора для включения тиристора или симистора каждого контура цепи фазного ротора.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| Способ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления | 1976 |
|
SU646800A1 |
| Способ управления трехфазным асинхронным двигателем с фазным ротором | 1990 |
|
SU1741248A1 |
| Устройство для ориентированной укладки стержнеобразных предметов с отверстием на торце | 1981 |
|
SU958231A1 |

