Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации движущихся объектов.
Известен способ выработки навигационных параметров и вертикали места инерциальной системой (1). Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометров, формирование управляющих сигналов гироскопов, отработку сформированных сигналов при помощи гироскопов или включает измерение составляющих кажущегося ускорения при помощи акселерометров, определение составляющих абсолютной угловой скорости приборного трехгранника при помощи датчиков абсолютной угловой скорости, выработку навигационных параметров.
Недостатком этого способа является большая продолжительность времени запуска системы - готовности системы.
Целью изобретения является уменьшение времени готовности системы.
Технический эффект достигается тем, что при запуске системы минимизируют время переходного процесса шулеровского контура, а динамическую составляющую сигналов акселерометров сглаживают при помощи фильтров, при этом сглаживающие фильтры могут функционировать непосредственно в линиях сигналов акселерометров и(или) в линиях цепи демпфирования шулеровского контура инерциальной системы (ИС).
На фиг. 1 представлена функциональная схема инерциальной системы, где приняты следующие обозначения:
1 - блок управления;
2 - гироплатформа;
3 - трехстепенной гироскоп;
4, 5 - датчики момента гироскопа;
6, 7 - датчики угла гироскопа;
8 - одноосный гиростабилизатор;
9, 10 - акселерометры;
11, 12 - датчики углов качек;
13, 14 - следящие двигатели;
15, 16 - сглаживающие фильтры;
17 - блок выработки навигационных параметров;
18 - блок внешней навигационной информации.
Инерциальная система содержит блок управления 1, гироплатформу 2. На гироплатформе расположены трехстепенной гироскоп 3 с датчиками момента 4, 5 и датчиками угла 6, 7, одноосный гиростабилизатор 8, ось стабилизации которого перпендикулярна плоскости гироплатформы, акселерометры 9, 10. По осям карданного подвеса установлены датчики углов качек 11, 12 и следящие двигатели 13, 14.
Инерциальная система содержит также сглаживающие фильтры 15, 16, блок выработки навигационных параметров 17 и блок внешней навигационной информации 18.
Инерциальная системы функционирует следующим образом.
Гироплатформа 2 с помощью следящих двигателей 13, 14 по сигналам рассогласования датчиков угла 6, 7 гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. По сигналам акселерометров 9, 10 и одноосного гиростабилизатора 8 гироплатформу с помощью датчиков момента гироскопа 3 удерживают в плоскости горизонта. По сигналам управления гироскопа 3 и одноосного гиростабилизатора 8 определяют в блоке выработки навигационных параметров 17 навигационные параметры: широту и долготу места и курс объекта.
Время готовности системы в первую очередь зависит от времени затухания переходного процесса шулеровского контура. Структура и параметры (коэффициенты демпфирования) цепи демпфирования шулеровского контура могут определяться, например, с помощью фильтра Баттерворда.
В рабочем режиме инерциальной системы постоянная времени фильтра Баттерворда Т0 выбирается порядка 600 с. Если иметь в виду, что затухание переходного процесса фильтра Баттерворда составляет 8 Т0, то это означает, что если не предпринимать никаких мер при запуске системы, то время готовности системы будет определяться значением порядка 1,3 часа. В современных инерциальных системах время готовности составляет величину порядка 1,5 часа. Для того чтобы уменьшить время готовности, например до получаса, соответственно должна быть уменьшена постоянная времени фильтра Баттерворда Т0. Это достигается тем, что увеличивают коэффициенты демпфирования шулеровского контура, поскольку именно таким образом значения коэффициентов демпфирования функционально связаны со значением постоянной времени Т0. Но при увеличении коэффициентов демпфирования шулеровского контура резко возрастает вредное влияние ускорений объекта в месте установки инерциальной навигационной системы из-за качки на динамику шулеровского контура, что препятствует успокоению колебаний шулеровского контура.
Для уменьшения влияния ускорений качки объекта сигналы акселерометров при запуске системы сглаживают с помощью сглаживающих фильтров. Функционально сглаживающие фильтры могут быть либо непосредственно в линиях сигналов акселерометров и(или) в линиях цепи демпфирования шулeровского контура инерциальной системы. При качках с периодом 7-20 секунд постоянная времени фильтра может иметь значения порядка 5-10 секунд.
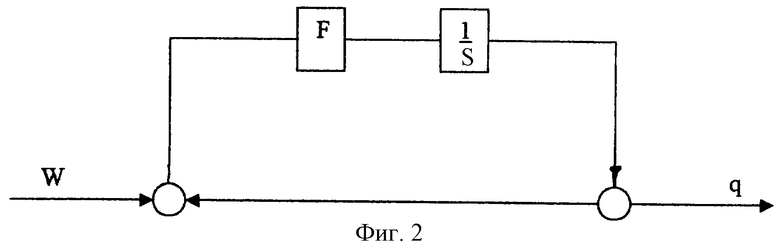
Структура сглаживающего фильтра представлена на фиг. 2, где обозначено:
w - сигнал акселерометра;
q - сглаживающий сигнал акселерометра;
F - передаточная функция;
S - оператор Лапласа.
Например, для фильтра первого порядка F=1/Т0, тогда выходной сигнал сглаживающего фильтра q=w/T0s+1, где Т0 - постоянная времени фильтра.
Следует отметить, что предлагаемый способ может быть осуществлен для различных типов инерциальных систем, в том числе для платформенной или бесплатформенной инерциальных систем, для различных типов гироскопов, будь то механические волоконные, лазерные, твердотельные и другие или их комбинации.
Источник информации
1. В.А. Беленький, патент РФ 2145058.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА (ВАРИАНТЫ) | 2005 |
|
RU2272995C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2001 |
|
RU2197716C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2006 |
|
RU2315956C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2147731C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2005 |
|
RU2309384C2 |
Использование: для обеспечения навигации движущихся объектов. Сущность: при запуске системы минимизируют время переходного процесса шулеровского контура. Динамическую составляющую сигналов акселерометров сглаживают при помощи фильтров. Сглаживающие фильтры могут функционировать непосредственно в линиях сигналов акселерометров и(или) в линиях цепи демпфирования шулеровского контура инерциальной системы. Технический результат: уменьшение времени готовности системы. 2 ил.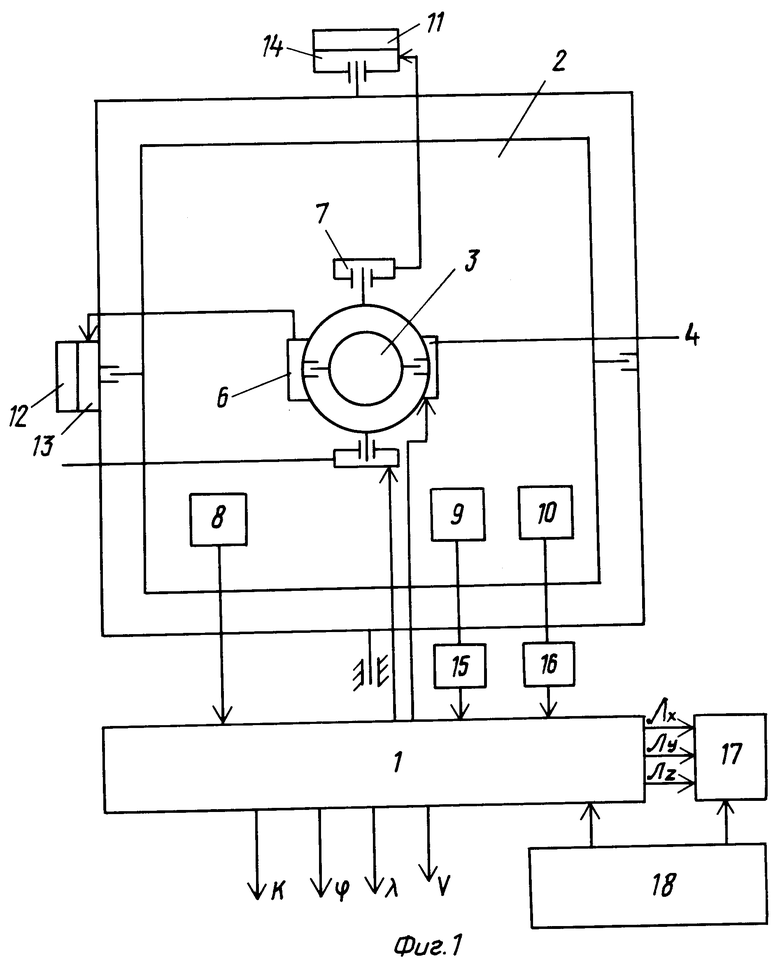
Способ выработки навигационных параметров и вертикали места инерциальной системой, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, выработку составляющих абсолютной угловой скорости приборного трехгранника при помощи гироскопов, выработку навигационных параметров, отличающийся тем, что при запуске системы минимизируют время переходного процесса шулеровского контура, а динамическую составляющую сигналов акселерометров сглаживают при помощи фильтров, при этом сглаживающие фильтры могут функционировать непосредственно в линиях сигналов акселерометров и (или) в линиях цепи демпфирования шулеровского контура инерциальной системы.
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
| US 5359889 A, 01.11.1994 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |

