Изобретение относится к электрическому транспорту, а именно к области автоматического выравнивания нагрузок тяговых двигателей.
Известен способ выравнивания нагрузок тяговых двигателей однофазно-постоянного тока в режиме рекуперации, при котором для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и, в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, причем сигналом, из которого вычитается сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный максимальному из токов якорей всех тяговых двигателей (см. книгу Электровозостроение: Сборник научных трудов ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ"). - 1998. Т.40 - 348 с. на страницах 283-288).
При таком способе регулирования использование интегрального или пропорционально-интегрального регуляторов приводит к их "насыщению" и прекращению выравнивания нагрузок. Применение пропорциональных регуляторов приводит к возникновению статической ошибки регулирования, обусловленной типом регулятора.
Наиболее близким по технической сущности является способ выравнивания нагрузок тяговых двигателей постоянного тока в режиме рекуперации, состоящий в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и, в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, причем сигналом, из которого вычитают сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный току якоря тягового двигателя с максимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения, а при равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения, вычитание ведут из сигнала, пропорционального максимальному из токов якорей этих тяговых двигателей (см. пат. РФ №2207255, МПК 7 В 60 L 7/12 от 05.11.2001).
Этот способ имеет следующий недостаток. Как указывалось в пат. № 2207255, использование интегральных или пропорционально-интегральных регуляторов позволяет устранить статическую ошибку регулирования, а выравнивание по максимальной фазе импульсов управления вентилями, шунтирующими обмотки возбуждения тяговых двигателей, обеспечивает выравнивание нагрузок во всем рабочем диапазоне регуляторов выравнивания - от αв до βрег. Однако при таком способе выравнивание начинается при максимальной фазе импульсов управления вентилей, шунтирующих обмотки возбуждения тяговых двигателей, и заканчивается, когда резисторы, шунтирующие обмотки возбуждения, обеспечили необходимую отпитку тока возбуждения каждого тягового двигателя. Поэтому потери энергии в резисторах отпитки максимальны.
Задачей изобретения является выравнивание нагрузок тяговых двигателей в режимах тяги и рекуперативного торможения при минимальных потерях энергии в резисторах, шунтирующих обмотки возбуждения.
Поставленная задача решается способом выравнивания нагрузок тяговых двигателей, состоящем в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и, в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя, причем сигналом, из которого вычитают сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный току якоря тягового двигателя с минимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения. При равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения, вычитание ведут для режима тяги из сигнала, пропорционального максимальному из токов якорей этих тяговых двигателей, для режима рекуперации - из сигнала, пропорционального минимальному из токов якорей этих тяговых двигателей, что позволяет свести потери энергии в шунтирующих тиристорах к минимуму, т.к. резисторы находятся меньше времени под напряжением, чем в прототипе.
На фиг.1 изображена функциональная схема системы выравнивания нагрузок, соответствующая способу-прототипу, где:
ЭС1...ЭС6 - элементы сравнения;
РН1...РН6 - регуляторы нагрузки;
ФР1...ФР6 - фазорегуляторы;
ЛЭ1...ЛЭ6 - логические элементы;
ФИ1...ФИ6 - формирователи импульсов управления;
ТК1...ТК6 - тиристорные ключи;
R1...R6 - шунтирующие резисторы;
ДТ1...ДТ6 - датчики тока;
ИЛИmax - логическая схема выделения максимального из входных сигналов;
OВ1...OВ6, M1...М6 - обмотки возбуждения и якоря ТД1...ТД6;
ВУВ - выпрямительная установка возбуждения.
На фиг.2 показаны напряжения на шунтирующих обмотки возбуждения резисторах и характеристики намагничивания при реализации способа-прототипа в режиме рекуперации для электровоза ВЛ 65 с шестью тяговыми двигателями; на фиг.3 изображено устройство для реализации предлагаемого способа; на фиг.4 - алгоритм функционирования устройства для режима тяги; на фиг.5 - алгоритм функционирования устройства для режима рекуперации; на фиг.6 - регулирование фазы вентилей, шунтирующих обмотки возбуждения по предлагаемому способу.
Устройство состоит из блока тиристорных ключей отпитки 1, управляемых микропроцессорной системой, состоящей из процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, блока синхронизации 5, аналого-цифрового преобразователя (АЦП) 6, дискретного фазосдвигающего устройства 7 и выходных усилителей 8. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, выход АЦП 6 и вход дискретного фазосдвигающего устройства 7 соединены шиной адресов-данных 9. Выход дискретного фазосдвигающего устройства 7 соединен со входом усилителей 8, выходы которого соединены с тиристорными ключами отпитки 1. Выход блока синхронизации 5 соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, АЦП 6, дискретного фазосдвигающего устройства 7 и выходных усилителей 8.
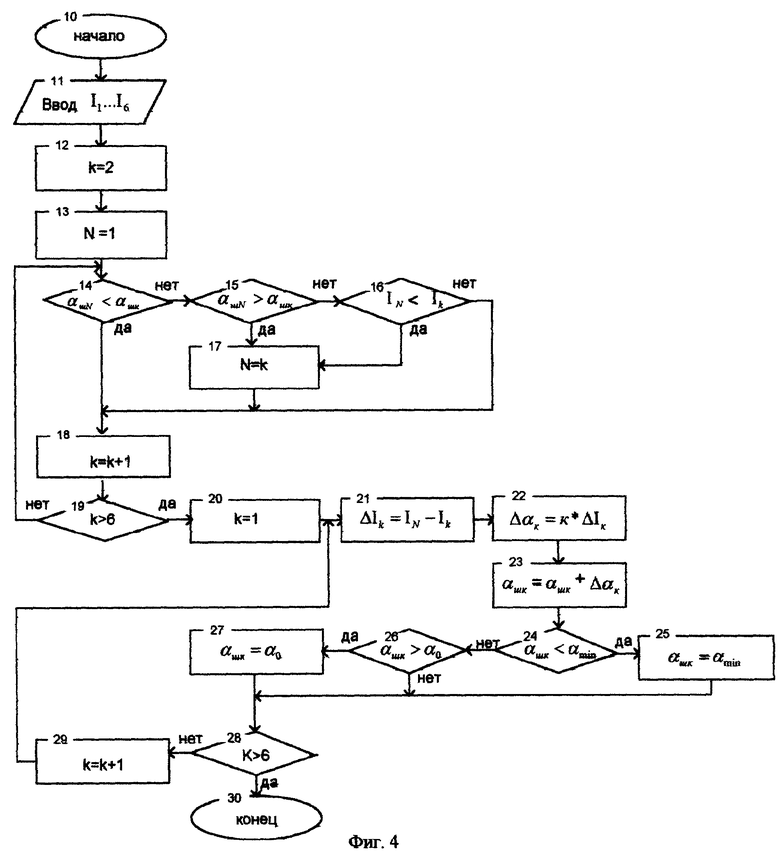
Способ регулирования для режима тяги реализуют в соответствии с алгоритмом, приведенным на фиг.4.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 5 появляется импульс, по которому производится начальная установка процессора 2, ОЗУ 3, ПЗУ 4, дискретного фазосдвигающего устройства 7 и запускается АЦП 6. После этого микропроцессорная система функционирует в соответствии с командами и константами, записанными в ПЗУ 4, причем в первом полупериоде питающего напряжения значения углов отпирания вентилей, шунтирующих обмотки возбуждения, αш1...αш6, задают равными αmin, что соответствует минимальной величине тока отпитки.
В текущем полупериоде осуществляют ввод (блок 11) значений токов якорей шести двигателей и определяют номер тягового двигателя N с минимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения (блоки 12, 13, 14, 15), причем при равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения двигателей, номер двигателя, по току которого идет выравнивание, идентифицируют с номером двигателя, имеющего максимальный ток якоря (блоки 16...17). В блоке 21 из сигнала, пропорционального току двигателя, по которому осуществляется выравнивание IN, вычитают сигнал, пропорциональный току якоря того двигателя, ток которого выравнивают. В блоке 22 осуществляют ввод в регулятор сигнала, пропорционального этой разности, и в блоке 23 формируют фазу импульса управления αшк вентилем, шунтирующим обмотку возбуждения двигателя, ток якоря которого выравнивают. В блоках 24...27 значение фазы ограничивают по максимуму и минимуму.
Способ регулирования для режима рекуперации реализуют в соответствии с алгоритмом, приведенным на фиг.5.
При переходе питающего напряжения через нулевое значение на выходе блока синхронизации 5 появляется импульс, по которому производится начальная установка процессора 2, ОЗУ 3, ПЗУ 4, дискретного фазосдвигающего устройства 7, и запускается АЦП 6. После этого микропроцессорная система функционирует в соответствии с командами и константами, записанными в ПЗУ 4, причем в первом полупериоде питающего напряжения при входе в рекуперацию значения углов отпирания вентилей, шунтирующих обмотки возбуждения, αш1...αш6, задают равными βрег, что соответствует минимальной величине тока отпитки.
В текущем полупериоде осуществляют ввод (блок 32) значений якорей тяговых двигателей I1...I6 и определяют номер тягового двигателя с минимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения, причем при равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения двигателей, определяют номер двигателя N с минимальным током якоря из этих тяговых двигателей (блоки 33-40). В блоке 42 из сигнала, пропорционального току двигателя, по которому осуществляют выравнивание IN, вычитают сигнал, пропорциональный току якоря того двигателя, ток которого выравнивают. В блоке 43 осуществляется ввод в регулятор сигнала, пропорционального этой разности, и формирование фазы импульсов управления αшк (блок 44) вентилем, шунтирующим обмотку возбуждения двигателя, нагрузку которого выравнивают. В блоках (45-48) значение фазы ограничивают по максимуму и минимуму.
Предлагаемый способ выравнивания нагрузок тяговых двигателей позволяет выравнять их во всем диапазоне изменения без статической погрешности, при этом потери энергии в резисторах отпитки обмоток возбуждения минимальны, т.к. резисторы отпитки стали находиться под напряжением меньшее время (см. фиг.2 и фиг.6).
Способ реализован на электровозе ЭП1 №103 и прошел испытания на обкатном кольце НЭВЗа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1989 |
|
SU1676859A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ТОКОВОЙ ЗАЩИТЫ ББР ЭЛЕКТРОВОЗОВ СЕРИИ ВЛ80Р | 2011 |
|
RU2459717C1 |
| Устройство для сравнения постоянных токов | 1976 |
|
SU656019A2 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2018 |
|
RU2724981C2 |
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ТЯГОВЫХ ДВИГАТЕЛЯХ ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА И СХЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2288851C2 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| Устройство для перевода тягового двигателя постоянного тока в режим рекуперации | 1971 |
|
SU521159A1 |




Изобретение относится к электрическому транспорту. Для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, и вводят в регулятор сигнал, пропорциональный разности этих сигналов. В зависимости от величины этой разности формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя через резистор отпитки. Сигналом, из которого вычитают сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный току якоря тягового двигателя с минимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения. При равенстве фаз импульсов управления вентилями, шунтирующими обмотки возбуждения, вычитание ведут для режима тяги из сигнала, пропорционального максимальному из токов якорей этих тяговых двигателей, а для режима рекуперации - из сигнала, пропорционального минимальному из токов якорей этих тяговых двигателей. Это позволяет свести потери энергии в шунтирующих тиристорах к минимуму, т.к. резисторы находятся меньше времени под напряжением, чем в прототипе. 6 ил.
Способ выравнивания нагрузок тяговых двигателей постоянного тока в режимах тяги и рекуперации, состоящий в том, что для каждого тягового двигателя из сигнала, пропорционального току якоря одного из тяговых двигателей, вычитают сигнал, пропорциональный току якоря этого тягового двигателя, вводят в регулятор сигнал, пропорциональный разности этих сигналов, и, в зависимости от величины этой разности, формируют фазу импульсов управления вентилем, шунтирующим обмотку возбуждения этого тягового двигателя через резистор отпитки, отличающийся тем, что сигналом, из которого вычитают сигнал, пропорциональный току якоря этого тягового двигателя, является сигнал, пропорциональный току якоря тягового двигателя с минимальной фазой импульсов управления вентилем, шунтирующим его обмотку возбуждения, а при равенстве фаз в режиме тяги вычитание ведут из сигнала, пропорционального максимальному из токов якорей этих тяговых двигателей, а в режиме рекуперации - из минимального.
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| Устройство для выравнивания нагрузок тяговых электродвигателей подвижного состава | 1985 |
|
SU1232521A1 |
| Устройство для распределения нагрузок тяговых электродвигателей электровоза | 1986 |
|
SU1428617A1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ТОКАМЕЖДУ ПАРАЛЛЕЛЬНЫМИ ВЕТВЯМИТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1972 |
|
SU435149A1 |

