Изобретение относится к электротехнике, к управлению входными преобразователями электроподвижного состава переменного тока, и может быть использовано для улучшения формы тока электроподвижного состава с четырехквадрантными преобразователями.
Известен способ управления параллельной работой четырехквадрантных преобразователей (4QS), при котором с целью дополнительного увеличения коэффициента мощности используют параллельное питание промежуточного звена от двух преобразователей со сдвинутыми периодами модуляции (Ротанов Н.А. Электроподвижной состав с асинхронными тяговыми двигателями. / Н.А.Ротанов, А.С.Курбасов, Ю.Г.Быков, В.В.Литовченко. - М.: Транспорт, 1991 - 336 с. на с.86).
Применение указанного способа на электроподвижном составе, в частности на многоосных электровозах, ограничено количеством используемых преобразователей свыше двух.
Наиболее близким по технической сущности является способ управления параллельной работой четырехквадрантных преобразователей, состоящий в том, что переключения силовых полупроводниковых приборов в фазовых модулях четырехквадрантных преобразователей формируют на основе функции скважности широтно-импульсной модуляции напряжения, причем каждым преобразователем управляют с фиксированным фазовым сдвигом модуляции, чтобы исключить низкочастотные гармоники тока в первичной обмотке трансформатора (Скарпетовский Г., Витинс Я. Концепция тяговых преобразователей и систем управления для электровозов с асинхронными двигателями // Вестник ВНИИЖТ, 1996. № 2., с.5-11, на с.8).
При таком способе управления ток электроподвижного состава, являющийся суммарным током всех параллельно работающих 4QS на первичной стороне тягового трансформатора, не во всех случаях будет синусоидальным, в зависимости от частоты модуляции либо крайние, либо центральные участки формируемой синусоиды в каждом полупериоде могут быть искаженными. Вследствие этого средневзвешенный коэффициент мощности э.п.с. за период питающего напряжения будет невысоким.
Задачей предлагаемого изобретения является улучшение качества потребляемого тока электроподвижным составом (э.п.с.) с параллельно работающими четырехквадрантными преобразователями.
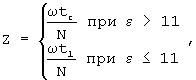
Поставленную задачу решают тем, что в известный способ управления параллельной работой четырехквадрантных преобразователей, при котором переключения силовых полупроводниковых приборов в фазовых модулях четырехквадрантных преобразователей формируют на основе функции скважности широтно-импульсной модуляции напряжения, причем каждым преобразователем управляют с фиксированным фазовым сдвигом модуляции, введены новые признаки: вводят количество параллельно работающих преобразователей, вводят нечетное количество импульсов напряжения модуляции на входе четырехквадрантного преобразователя за полупериод питающего напряжения, определяют для каждого полупериода длительность первого и центрального импульса напряжения и формируют фазовый сдвиг каждого преобразователя таким образом, что работу первого преобразователя осуществляют с нулевым фазовым сдвигом сетевого тока, работу следующего (четного) преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно первого преобразователя, работу следующего (нечетного) преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно первого преобразователя, работу каждого последующего нечетного преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно предыдущего нечетного преобразователя, работу каждого последующего четного преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно предыдущего четного преобразователя, при этом значение относительного фазового сдвига сетевого тока для всех преобразователей в каждый момент времени принимают одинаковым и определяют, в зависимости от количества импульсов модуляции напряжения за полупериод, по формуле
где t1 - длительность фазы первого импульса модулирующего сигнала за полупериод;
tC - длительность фазы центрального импульса модулирующего сигнала за полупериод;
ω - циклическая частота;
ε - количество импульсов напряжения модуляции на входе четырехквадрантного преобразователя за полупериод питающего напряжения;
N - количество параллельно работающих преобразователей.
Фактически количество параллельно работающих преобразователей для типажа современного электроподвижного состава не превышает восьми.
В предлагаемом техническом решении, в отличие от прототипа, несинусоидальность сетевого тока э.п.с. значительно снижается путем сложения сетевых токов каждого четырехквадрантного преобразователя, взаимно сдвинутых по фазе на значение длительности широтно-импульсно модулированного интервала (ШИМ-интервала), обратно пропорциональной количеству параллельно работающих преобразователей. В этом случае суммарный ток всех параллельно работающих четырехквадрантных преобразователей - ток э.п.с. - содержит меньше искажений, что приближает его к синусоидальной форме.
на приложенных к описанию чертежах показано:
на фиг.1 - временные зависимости токов 4QS и тока электровоза при параллельной работе двух 4QS с частотой модуляции каждого преобразователя 250 Гц (5 импульсов за полупериод промышленной частоты 50 Гц);
на фиг.2 - вариант устройства, реализующего предложенный способ управления;
на фиг.3 - алгоритм реализации предлагаемого способа управления параллельной работой четырехквадрантных преобразователей.
Сущность предлагаемого изобретения иллюстрируется фиг.1. На ней на примере параллельной работы двух четырехквадрантных преобразователей показано, что при фазовом сдвиге входного тока I2 второго преобразователя относительно фазы тока входного тока I1 первого преобразователя на значение Z суммарный потребляемый ток двух параллельно работающих преобразователей I12 имеет меньшие пульсации, а ток электровоза IN, на первичной стороне трансформатора вследствие влияния индуктивности последнего имеет практически синусоидальную форму.
Способ управления параллельной работой четырехквадрантных преобразователей реализуют микропроцессорной системой (фиг.2), состоящей из группы датчиков потребляемого тока 1 (11, 12, ..., 1N) и группы датчиков напряжения 2 (21, 22, ..., 2N), блока драйверов 3 (31, 32, ..., 3N) вентилей группы параллельно соединенных четырехквадрантных преобразователей 4, состоящих из N преобразователей (41, 42, ..., 4N), запитанных переменным напряжением u, блока синхронизации 5 преобразователей 4 с источником питания, процессора 6, оперативного запоминающего устройства (ОЗУ) 7, постоянного запоминающего устройства (ПЗУ) 8, блока таймеров 9, аналогово-цифрового преобразователя (АЦП) 10, блока широтно-импульсной модуляции (ШИМ) 11, блока ввода-вывода временных интервалов сигналов управления (В/В) 12, блока вычислений 13, контроллера прерываний 14, модуля "захват/сравнение" 15.
Входы-выходы блока синхронизации 5, процессора 6, ОЗУ 7, ПЗУ 8, блок таймеров 9, АЦП 10 и входы блока драйверов 4 объединены шиной данных-адресов 16. Преобразователи 4 получают питание от однофазной сети переменного тока, напряжение которой поступает на вход блока синхронизации 5. Выход блока синхронизации соединен с шинами синхронизации процессора 6, ОЗУ 7, ПЗУ 8, АЦП 10. Текущее значение тока и напряжения сети поступает на вход АЦП 10.
Процессор 6, ОЗУ 7, ПЗУ 8, блок таймеров 9, АЦП 10, блок ШИМ 11, блок ввода-вывода временных интервалов сигналов управления 12, блок вычислений 13, контроллер прерываний 14 и модуль "захват/сравнение" 15 могут быть выполнены на базе микропроцессорного контроллера М167-1х (каталог продукции АО "КАСКОД" "Бортовая и промышленная электроника", 189625, С.-Петербург, Павловск, Фильтровское шоссе, 3 (тел. (812) 466-5784, (812) 476-0795) с.66).
Способ управления параллельной работой четырехквадрантных преобразователей реализуют по алгоритму, приведенному на фиг.3. При переходе питающего напряжения u через нулевое значение на выходе блока синхронизации 5 появляется импульс синхронизации, по которому производят начальную установку процессора 6, ОЗУ 7, ПЗУ 8, блока ввода-вывода временного интервала 12 и запуск АЦП 10. После этого микропроцессорная система автоматического управления четырехквадрантного преобразователя функционирует в соответствии с командами и константами, записанными в ПЗУ 8.
Отсчет ведут от синхроимпульса (СИ) в начале каждого полупериода питающего напряжения. В блоке 17 вводят количество параллельно работающих преобразователей N, вводят количество импульсов напряжения модуляции на входе четырехквадрантного преобразователя за полупериод питающего напряжения, соответствующее функции скважности широтно-импульсной модуляции, определяют для каждого полупериода длительность первого t1 и центрального tC импульса напряжения на входе каждого преобразователя 41...4N. В блоке 18 сравнивают количество импульсов напряжения модуляции с пороговым ε=11 (одиннадцать). При ε>11 фазовый сдвиг каждого преобразователя определяют по выражению  (блок 19), иначе, при ε≤11 фазовый сдвиг каждого преобразователя определяют по выражению
(блок 19), иначе, при ε≤11 фазовый сдвиг каждого преобразователя определяют по выражению  (блок 20). Пороговое значение ε=11 определено экспериментальным путем.
(блок 20). Пороговое значение ε=11 определено экспериментальным путем.
В блоке 21 формируют фазовый сдвиг Z каждого преобразователя таким образом, что работу первого преобразователя 4 осуществляют с нулевым фазовым сдвигом сетевого тока (ϕ1=0), работу следующего (четного) преобразователя 42 осуществляют с положительным фазовым сдвигом сетевого тока относительно первого 41 преобразователя (ϕ2=ϕ1+Z), работу следующего 43 (нечетного) преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно первого преобразователя 41 (ϕ3=ϕ1-Z), работу каждого последующего нечетного преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно предыдущего нечетного преобразователя, работу каждого последующего четного преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно предыдущего четного преобразователя.
В блоке 22 реализуют алгоритм переключения силовых полупроводниковых приборов преобразователя в соответствии с рабочей частотой и фазовым сдвигом каждого из четырехквадрантных преобразователей. В процессе выполнения программы запускают драйверы блока драйверов 3, подключенных к цепям управления силовых полупроводниковых приборов преобразователей 4. При очередном съеме сигнала с датчиков тока 1 и датчиков напряжения 2 алгоритм управления повторяют.
Таким образом, предложенный способ управления параллельной работой четырехквадрантных преобразователей позволяет улучшить качество потребляемого тока электроподвижного состава: снизить амплитуды высокочастотных пульсаций тока электровоза, как следствие, улучшить энергетические характеристики и электромагнитную совместимость электропривода электроподвижного состава.
Согласно экспертной оценке повышение энергетических характеристик заявляемого способа управления по сравнению с прототипом при прочих равных условиях может быть увеличено в среднем на 2-2,5%.
Таким образом, совокупность вновь введенных в предлагаемом способе управления признаков позволяет решить задачу, на которую направлено изобретение, обеспечив при этом получение требуемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2004 |
|
RU2262189C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2004 |
|
RU2282295C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2005 |
|
RU2310263C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2000 |
|
RU2187185C2 |
Использование: в электротехнике, в управлении входными преобразователями электроподвижного состава переменного тока, для улучшения качества потребляемого тока. Сущность: формирование сетевого тока, потребляемого параллельно работающими четырехквадрантными преобразователями, осуществляют способом управления, при котором переключения силовых полупроводниковых приборов в фазовых модулях четырехквадрантных преобразователей формируют на основе функции скважности широтно-импульсной модуляции напряжения, причем каждым преобразователем управляют с фиксированным фазовым сдвигом модуляции. Вводят количество параллельно работающих преобразователей, вводят значение номинальной модуляции для нечетного количества импульсов напряжения на входе каждого преобразователя за полупериод несущей частоты, определяют для каждого полупериода длительность первого и центрального импульса напряжения на входе каждого преобразователя и формируют фазовый сдвиг каждого преобразователя таким образом, что работу первого преобразователя осуществляют с нулевым фазовым сдвигом сетевого тока, работу следующего (четного) преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно первого преобразователя, работу следующего (нечетного) преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно первого преобразователя. Работу каждого последующего нечетного преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно предыдущего нечетного преобразователя, работу каждого последующего четного преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно предыдущего четного преобразователя. Значение фазового определяют по формуле
где t1 - длительность фазы первого импульса модулирующего сигнала за полупериод;
tc - длительность фазы центрального импульса модулирующего сигнала за полупериод;
ω - циклическая частота;
ε - количество импульсов напряжения модуляции на входе четырехквадрантного преобразователя за полупериод питающего напряжения;
N - количество параллельно работающих преобразователей.
Техническим результатом является улучшение качества потребляемого тока электроподвижным составом. 3 ил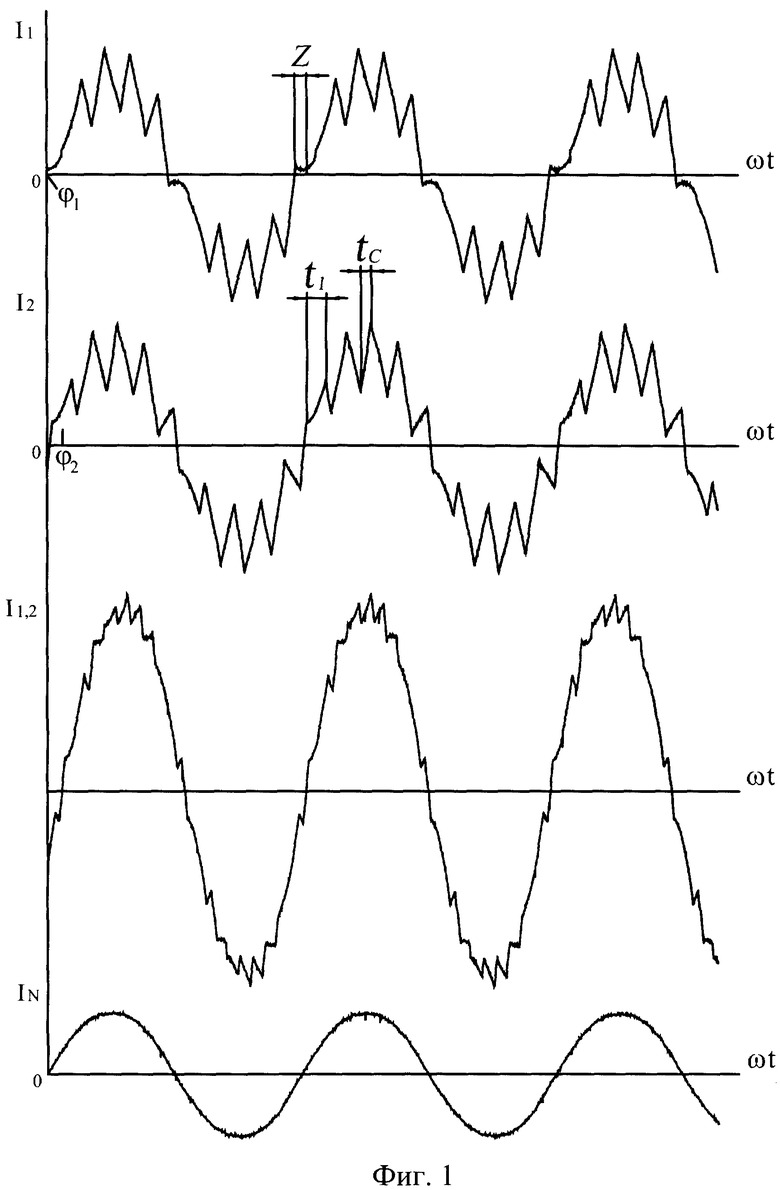
Способ управления параллельной работой четырехквадрантных преобразователей, состоящий в том, что переключения силовых полупроводниковых приборов в фазовых модулях четырехквадрантных преобразователей формируют на основе функции скважности широтно-импульсной модуляции напряжения, причем каждым преобразователем управляют с фиксированным фазовым сдвигом модуляции, отличающийся тем, что вводят количество параллельно работающих преобразователей, вводят нечетное количество импульсов напряжения модуляции напряжения на входе каждого преобразователя за полупериод несущей частоты, определяют для каждого полупериода длительность первого и центрального импульса напряжения на входе каждого преобразователя и формируют фазовый сдвиг каждого преобразователя таким образом, что работу первого преобразователя осуществляют с нулевым фазовым сдвигом сетевого тока, работу следующего (четного) преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно первого преобразователя, работу следующего (нечетного) преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно первого преобразователя, работу каждого последующего нечетного преобразователя осуществляют с положительным фазовым сдвигом сетевого тока относительно предыдущего нечетного преобразователя, работу каждого последующего четного преобразователя осуществляют с отрицательным фазовым сдвигом сетевого тока относительно предыдущего четного преобразователя, при этом значение фазового сдвига сетевого тока для всех преобразователей принимают одинаковым и определяют по формуле
где t1 - длительность фазы первого импульса модулирующего сигнала за полупериод;
tc - длительность фазы центрального импульса модулирующего сигнала за полупериод;
ω - циклическая частота;
ε - количество импульсов напряжения модуляции на входе четырехквадрантного преобразователя за полупериод питающего напряжения;
N - количество параллельно работающих преобразователей.
| Способ управления статическим преобразователем с параллельными вентильными цепями | 1974 |
|
SU523499A1 |
| RU 2002103827 C2, 10.11.2003 | |||
| Блок насадки для удерживания микроорганизмов и гидробионитов в биореакторах очистки сточных вод | 1987 |
|
SU1502487A1 |

