Изобретение относится к электротехнике, к векторному регулированию входных преобразователей электроподвижного состава переменного тока, и может быть использовано для регулирования заданных параметров четырехквадрантного преобразователя при изменяющейся нагрузке.
Предпосылки создания изобретения.
Недостатком большинства существующих способов регулирования четырехквадрантного преобразователя является сложность точной идентификации изменения угла сдвига фаз тока сети относительно напряжения сети при изменении угла нагрузки. На практике это приводит к потреблению из сети реактивного тока, увеличению установленной мощности питающего трансформатора и росту электрических потерь, а также требует принятия специальных технических мер для обеспечения необходимой ориентации вектора тока сети при изменении характера нагрузки и питающей сети.
Процесс регулирования вектора тока сети преобразователя, обусловленный как недостаточно качественной первоначальной настройкой регуляторов, так и постоянным изменением нагрузки в эксплуатации, вносит в определение углового положения вектора тока сети погрешность, приводящую к ухудшению энергетических показателей и электромагнитной совместимости электроподвижного состава, а в ряде случаев и к нарушению устойчивого функционирования электропривода.
При изменении нагрузки преобразователя, в зависимости от постоянной времени регулятора, достижение заданных показателей происходит с определенной инерционностью. По достижении регулируемой величиной требуемого значения может оказаться, что работа с таким параметром неудовлетворительно сказывается на характеристиках системы преобразования и требует изменения этого параметра до приемлемого уровня. Такое регулирование сопровождается затяжными переходными процессами, что негативно сказывается на качестве преобразованной энергии.
В связи с изложенным, чрезвычайно актуальна разработка эффективных способов регулирования вектора тока сети четырехквадрантного преобразователя, обеспечивающих работу преобразователя с допустимыми параметрами регулирования.
Известен способ прогнозирующего релейно-векторного управления вектором токов сети обратимого преобразователя энергии переменного тока в энергию постоянного тока (Заявка РФ №2001102907/09. Способ прогнозирующего релейно-векторного управления вектором токов сети обратимого преобразователя энергии переменного тока в энергию постоянного тока. Авторы: Р.Т.Шрейнер, А.А.Ефимов, Г.С.Зиновьев. Опубликовано 12.20.2002, МПК 7 Н 02 М 7/00), при котором формируют массив состояний ключей полупроводникового коммутатора, формируют массив значений дискретной коммутационной вектор-функции, элементы которого соответствуют только тем элементам массива состояний, которые, будучи реализованы, дают различимые комбинации фазных напряжений на силовых входах полупроводникового коммутатора, затем по результатам прогноза выбирают то значение коммутационной функции, которое обеспечит получение вектора токов сети, наиболее близкого к заданному вектору токов сети.
При таком способе управления, применительно к четырехквадрантному преобразователю, сложно спрогнозировать ориентацию вектора токов сети, зависящую как от изменения нагрузки, так и от текущей ориентации вектора токов сети, что в свою очередь приводит к излишним функциональным операциям при регулировании по достижению заданных параметров.
Известен способ регулирования четырехквадрантного преобразователя, заключающийся в том, что фазу вектора тока сети регулируют изменением продолжительности времени приложения к обмотке питающего трансформатора напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и выходного напряжения преобразователя, вводят величину заданного напряжения на выходе преобразователя и сравнивают ее с текущим значением, при отрицательной разнице заданного и текущего напряжения на выходе преобразователя уменьшают интегральную сумму регулируемого напряжения, при положительной разнице - увеличивают интегральную сумму регулируемого напряжения преобразователя (Солтус К.П.Формирование логики управления четырехквадрантным преобразователем // Известия вузов. Северо-Кавказский регион. Технические науки. - 2004, №1. - С.37-40).
Этот способ реализуют посредством сложных определений времени приложения переменного напряжения и разности переменного напряжения и напряжения на выходе преобразователя с целью определения углов фаз вектора тока сети и угла нагрузки, что требует значительных ресурсов системы управления преобразователем, связанных с трудностями измерения и преобразования угла сдвига фаз, а также с погрешностями при разделении мгновенной фазы от мгновенной амплитуды (например, переменного напряжения на входе преобразователя и падения напряжения на индуктивности входной цепи).
Кроме того, способ не учитывает влияние изменения нагрузки и фазы вектора тока сети на мощность тягового трансформатора питающего преобразователь, которая может варьироваться в широких пределах и превышать установленные значения до недопустимого уровня, исходя из формулы:
где UN - напряжение источника питания.
ω - частота напряжения источника питания;
LN - приведенная индуктивность входной цепи преобразователя;
ϕ - угол сдвига фаз между векторами напряжения и тока источника питания (сети);
ψ - угол нагрузки преобразователя.
Угол нагрузки преобразователя можно определить по формуле:
где IN - ток сети.
Таким образом, к причинам, препятствующим достижению требуемого результата - регулированию фазы тока сети при изменяющейся нагрузке, относится вероятность возникновения недопустимых комбинаций ψ и ϕ, способных завысить установленную мощность тягового трансформатора сверх допустимой.
Наиболее близким, по технической сущности, является способ регулирования четырехквадрантного преобразователя, принятый за прототип, состоящий в том, что фазу вектора тока сети в каждом полупериоде питающего напряжения регулируют изменением модуляции входного напряжения посредством коммутации вентилей четырехквадрантного преобразователя (см. Литовченко В.В. 4q-S-четырехквадрантный преобразователь электровозов переменного тока // Изв. вузов. Электромеханика. 2000. №3. С.64-73).
Недостатком способа, как и предыдущего аналога, является отсутствие возможности спрогнозировать изменение фазы вектора тока сети при изменении нагрузки. Способ характеризуется также сложностью определения положения изменяющихся векторов, что связано с вероятностью появления вектора ошибки из-за нелинейных взаимосвязанных изменений фазы и амплитуды ориентирующих векторов состояния преобразователя.
Задачей предлагаемого изобретения является создание способа регулирования четырехквадрантного преобразователя, позволяющего, при множестве возможных комбинаций управляющих величин, однозначно определять изменение фазы тока сети при изменении нагрузки, а также исключать недопустимые комбинации параметров регулирования преобразователя.
Поставленную задачу решают тем, что в известный способ регулирования четырехквадрантного преобразователя, при котором фазу вектора тока сети в каждом полупериоде питающего напряжения регулируют изменением модуляции входного напряжения коммутацией вентилей четырехквадрантного преобразователя, введены новые признаки: формируют массив значений М потребляемой мощности преобразователя, элементами которого являются допустимые значения фазы вектора тока сети и угла нагрузки, формируют массив прогнозных значений F фазы вектора тока сети, элементами которого являются текущее значение фазы вектора тока сети, текущее значение угла нагрузки и изменение угла нагрузки от текущего значения, которые, будучи реализованы, дают различимые комбинации управляющих воздействий, соответствующих допустимой потребляемой мощности преобразователя, причем прогнозное изменение фазы Δϕ вектора тока сети в зависимости от текущего значения фазы вектора тока сети и текущего значения угла нагрузки при изменении угла нагрузки определяют по формуле
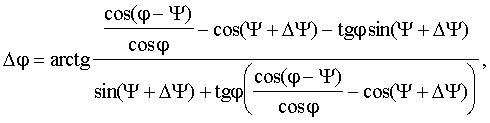
где ϕ - текущее значение фазы вектора тока сети;
ψ - текущее значение угла нагрузки;
Δψ - изменение угла нагрузки.
В предлагаемом техническом решении, в отличие от прототипа, изменение угла сдвига фазы тока сети можно прогнозировать по изменению угла нагрузки. Это существенно разгрузит ресурсы системы регулирования, сократив время "прямого счета" обрабатываемой информации с датчиков сети и исключит работу преобразователя с недопустимыми параметрами регулирования, приводящими, в частности, к перегрузке тягового трансформатора.
Сказанное позволяет сделать вывод о причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
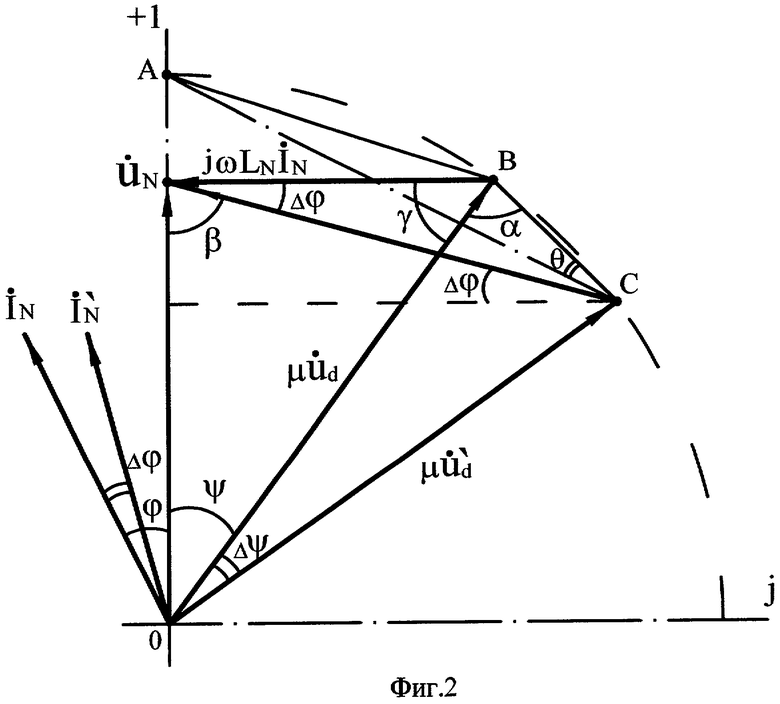
Сущность предлагаемого изобретения иллюстрируется векторной диаграммой четырехквадрантного преобразователя, из которой видно, что изменение угла нагрузки ψ вызывает изменение фазы ϕ вектора тока сети  относительно напряжения сети UN.
относительно напряжения сети UN.
С изменением (в данном случае увеличением) нагрузки происходит изменение вектора падения напряжения на индуктивности входной цепи  из точки B в точку С при постоянстве амплитудного значения напряжения на входе преобразователя
из точки B в точку С при постоянстве амплитудного значения напряжения на входе преобразователя  . При этом угол нагрузки ψ изменяется на величину Δψ. Изменение угла нагрузки приводит к изменению фазы ϕ вектора тока сети IN на значение Δϕ, что приводит к изменению пространственного положения вектора тока сети до состояния I'N. Из анализа векторной диаграммы можно получить выражение, характеризующее влияние изменения угла нагрузки Δψ на изменение фазы вектора токов сети в зависимости от исходного состояния фазы ψ нагрузки и фазы ϕ вектора тока сети, что позволяет рассматривать эти параметры как массив состояний F фазы тока сети, элементами которого являются: текущее значение фазы вектора тока сети, текущее значение угла нагрузки, изменение угла нагрузки от текущего значения и изменение фазы вектора тока сети
. При этом угол нагрузки ψ изменяется на величину Δψ. Изменение угла нагрузки приводит к изменению фазы ϕ вектора тока сети IN на значение Δϕ, что приводит к изменению пространственного положения вектора тока сети до состояния I'N. Из анализа векторной диаграммы можно получить выражение, характеризующее влияние изменения угла нагрузки Δψ на изменение фазы вектора токов сети в зависимости от исходного состояния фазы ψ нагрузки и фазы ϕ вектора тока сети, что позволяет рассматривать эти параметры как массив состояний F фазы тока сети, элементами которого являются: текущее значение фазы вектора тока сети, текущее значение угла нагрузки, изменение угла нагрузки от текущего значения и изменение фазы вектора тока сети
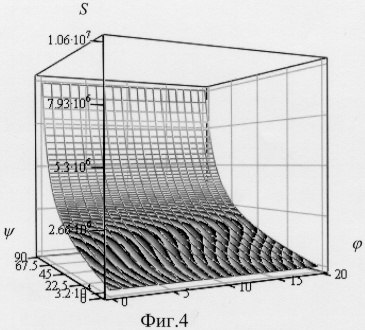
На фиг.4 приведена типовая зависимость мощности потребляемой преобразователем S (ось аппликат) от фазы ϕ вектора тока сети (ось абсцисс) и угла нагрузки ψ (ось ординат). Как видно из зависимости, существуют участки работы, определяемые углами ϕ и ψ, при которых возможно значительное превышение мощности потребляемой преобразователем, а следовательно и установленной рабочей мощности питающего трансформатора.
Как показывает опыт проектирования подобных систем, ввиду ограниченности массо-габаритных показателей электроподвижного состава весьма сложно закладывать запасы по установленной мощности тягового трансформатора с целью снижения порога перегрузок, а аппаратное ограничение предельной мощности тягового трансформатора может ухудшить тяговые свойства электроподвижного состава. Это обстоятельство приводит к наличию недопустимых параметров работы трансформатора при питании четырехквадрантного преобразователя.
Фаза вектора тока сети и угол нагрузки являются элементами массива значений М мощности потребляемой преобразователем 
На приложенных к описанию чертежах показано:
на фиг.1 - принципиальная схема четырехквадрантного преобразователя;
на фиг.2 - векторная диаграмма четырехквадрантного преобразователя;
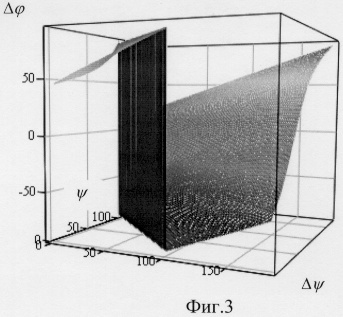
на фиг.3 - зависимость изменения фазы вектора тока сети от изменения угла нагрузки и текущего значения угла нагрузки;
на фиг.4 - зависимость мощности, потребляемой преобразователем от фазы вектора тока сети и угла нагрузки;
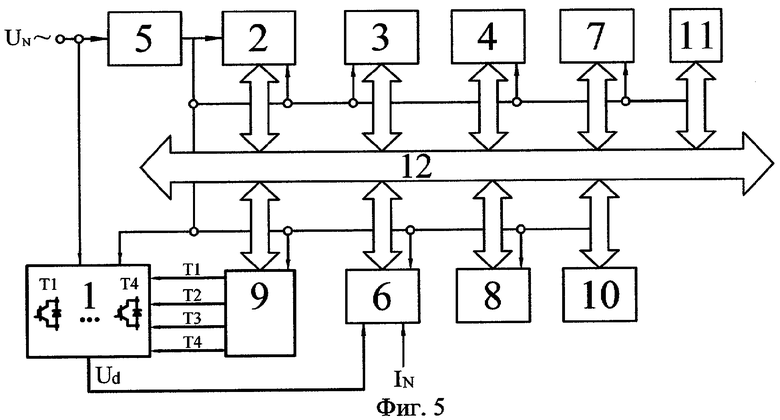
на фиг.5 - вариант структурной схемы, реализующей предложенный способ регулирования;
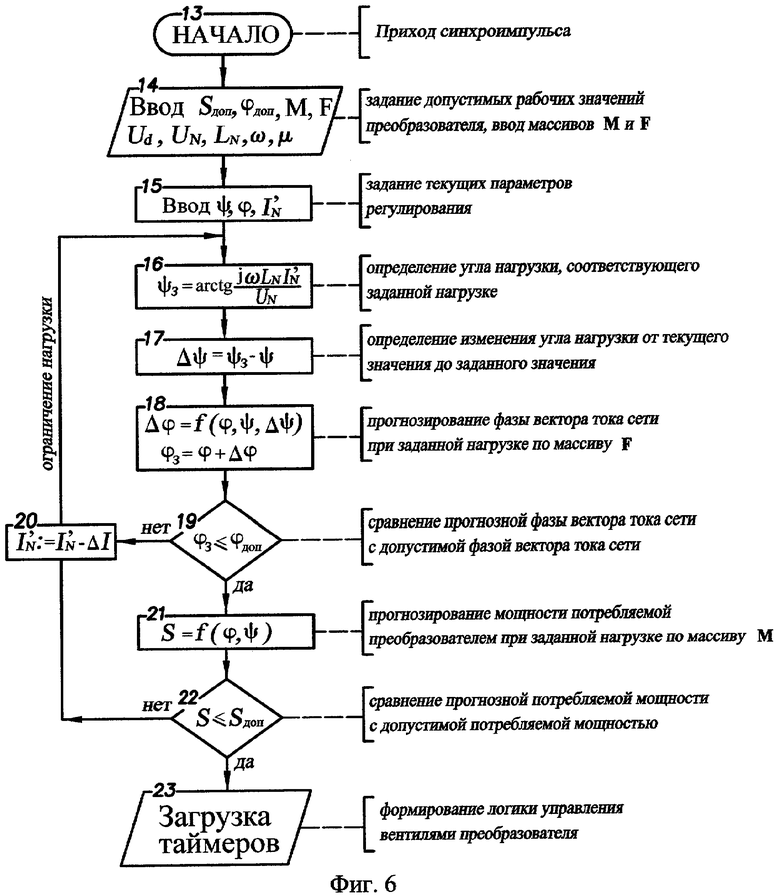
на фиг.6 - алгоритм реализации предлагаемого способа регулирования;
Схема (фиг.5) представляет собой микропроцессорную систему регулирования четырехквадрантного преобразователя, в которой блоки 5, 7, 8 и 10 реализованы программно.
Преобразователь 1 управляется микропроцессорной системой автоматического регулирования, состоящей из процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, блока синхронизации 5, аналого-цифрового преобразователя (АЦП) 6, блока прогнозирования фазы тока сети 7, блока определения потребляемой мощности преобразователя 8, блока драйверов 9 вентилей преобразователя 1, блока ввода-вывода временных интервалов 10, задатчика нагрузки 11. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, выходы АЦП 6 и входы блока драйверов объединены шиной данных-адресов 12. Преобразователь 1 получает питание от однофазной сети переменного тока, напряжение которой поступает на вход блока синхронизации 5. Выход блока синхронизации соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, АЦП 6, блока прогнозирования фазы тока сети 7. Текущее значение тока сети поступает на вход АЦП 6.
Процессор 2, ОЗУ 3, ПЗУ 4 и АЦП 6 могут быть выполнены на базе микропроцессорного контроллера М167-1х (каталог продукции АО "КАСКОД" "Бортовая и промышленная электроника", 189625, С-Петербург, Павловск, Фильтровское шоссе, 3 (тел. (812) 466-5784, (812) 476-0795) с.66).
До реализации алгоритма рассматриваемого способа управления четырехквадрантного преобразователя формируют массив значений М потребляемой мощности преобразователя, элементами которого являются допустимые значения фазы вектора тока сети и угла нагрузки, формируют массив прогнозных значений F фазы вектора тока сети, элементами которого являются текущее значение фазы вектора тока сети, текущее значение угла нагрузки и изменение угла нагрузки от текущего значения, которые, будучи реализованы, дают различимые комбинации управляющих воздействий, соответствующих допустимой потребляемой мощности преобразователя.
Массивы F и М формируют исходя из параметров регулирования и значений величин элементов схемы четырехквадрантного преобразователя. Сформированные массивы данных F и М помещают для хранения в память ПЗУ 4.
Способ реализуют следующим образом. При переходе питающего напряжения UN через нулевое значение на выходе блока синхронизации 5 появляется импульс, по которому производят начальную установку процессора 2, ОЗУ 3, ПЗУ 4, блока ввода-вывода временного интервала 10 и запуск АЦП 6. После этого микропроцессорная система автоматического регулирования четырехквадрантного преобразователя функционирует в соответствии с командами и константами, записанными в ПЗУ 4, причем в первом полупериоде питающего напряжения значения фазы вектора тока сети ϕ и значение угла нагрузки ψ задают равными номинальным.
В текущем полупериоде по приходу синхроимпульса (блок 13 (на фиг.6)) осуществляют ввод (блок 14) параметров и заданных допустимых рабочих значений преобразователя, ввод сформированного массива значений М потребляемой мощности преобразователя, элементами которого являются допустимые значения фазы вектора тока сети и угла нагрузки, ввод сформированного массива прогнозных значений F фазы вектора тока сети, элементами которого являются текущее значение фазы вектора тока сети, текущее значение угла нагрузки и изменение угла нагрузки от текущего значения, которые будучи реализованы, дают различимые комбинации управляющих воздействий, соответствующих допустимой потребляемой мощности преобразователя. При формировании массива F прогнозное изменение фазы Δϕ вектора тока сети в зависимости от текущего значения фазы вектора тока сети и текущего значения угла нагрузки при изменении угла нагрузки определяют по формуле
где ϕ - текущее значение фазы вектора тока сети;
ψ - текущее значение угла нагрузки;
Δψ - изменение угла нагрузки. Сигнал на изменение нагрузки (блок 15), полученный с задатчика нагрузки 11, подают в блок 16 где для значения заданного тока сети I'N определяют угол нагрузки ψЗ. В блоке 17 определяют изменение угла нагрузки Δψ от текущего значения ψ до заданного ψЗ. В блоке 18 выполняют прогнозирование фазы ϕЗ вектора тока сети при изменении нагрузки с исходного (текущего) состояния ψ, соответствующего сетевому току IN до заданного I'N по данным массива F. В блоке 19 прогнозное значение фазы вектора тока сети ϕз сравнивают с допустимым значением фазы вектора тока сети ϕдоп и в случае превышения ϕз над ϕдоп задают команду на снижение заданного значения потребляемого тока сети I'N (блок 20). Далее циклически определяют значение угла нагрузки, соответствующее сниженной нагрузке на величину ΔI. Величина изменения нагрузки ΔI за один цикл регулирования может принимать значения, равные, например, 0,005 от I'N. Нагрузку снижают до тех пор, пока угол нагрузки не будет соответствовать допустимой фазе тока сети из массива F. При соответствии прогнозной фазы вектора тока сети допустимой фазе тока сети из массива F прогнозируют мощность, потребляемую преобразователем (блок 21) по информации сформированной в массиве М, записанной и хранящейся в ПЗУ 4 системы регулирования. В случае превышения прогнозного значения мощности S из массива М (блок 22) при заданной нагрузке над значением допустимой мощности SДОП, снижают нагрузку (блок 20), а в случае ее соответствия допустимому значению формируют логику управления вентилями T1÷T4 четырехквадрантного преобразователя в блоке 10 для загрузки таймеров блока драйверов 9 (блок 23), обеспечивающих коммутацию преобразователя 1.
Отсчет ведут от синхроимпульса в начале каждого полупериода питающего напряжения (блок 13).
Таким образом, предложенный способ регулирования четырехквадрантного преобразователя позволяет заранее, до достижения регулятором требуемой величины нагрузки, исключать недопустимые комбинации параметров регулирования, приводящие к перегрузке тягового трансформатора, сократить количество функциональных преобразований при реализации требуемых параметров с целью снижения времени "прямого счета" системой регулирования, однозначно определять логико-математическим путем изменение фазы вектора тока сети при изменении нагрузки.
Примером конкретной реализации предложенного способа прогнозирующего векторного управления четырехквадрантного преобразователя является физическая модель четырехквадрантного преобразователя испытательного стенда ОАО "ВЭлНИИ". В качестве нагрузки преобразователя использовался трехфазный инвертор напряжения, питающий индукторный двигатель НТИ-350.
Коэффициент мощности четырехквадрантного преобразователя составил 0,9991 и оказался инвариантен к нагрузке. Значение выходного напряжения преобразователя поддерживалось на заданном уровне (1350 В) при изменении мощности нагрузки в диапазоне от 10 до 350 кВт. При этом значительно (в 2,7 раза) сократился объем управляющей программы системы регулирования.
Настоящее изобретение, основанное на прогнозном определении фазы вектора тока сети при изменении нагрузки, позволяет регулировать заданную фазу потребляемого тока сети во всем диапазоне работы и исключать недопустимые комбинации параметров регулирования, способных ухудшить энергетические показатели работы четырехквадрантного преобразователя.
Предлагаемое изобретение может найти применение в системах тягового привода электроподвижного состава переменного тока, где в качестве входных преобразователей используются четырехквадрантные преобразователи. Способ применим также и при параллельной работе четырехквадрантных преобразователей с любым типом модуляции входного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГЕНЕРИРУЮЩЕЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2005 |
|
RU2295191C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2000 |
|
RU2187185C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ УПРАВЛЕНИЯ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2004 |
|
RU2282295C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2005 |
|
RU2310263C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| Способ питания асинхронных двигателей трехфазного переменного тока системы вспомогательных машин электровоза | 2019 |
|
RU2714920C1 |
Использование: в электротехнике, в управлении входными преобразователями электроподвижного состава переменного тока, для регулирования заданных параметров четырехквадрантного преобразователя при изменяющейся нагрузке. Сущность: изменение фазы вектора тока сети, потребляемого четырехквадрантным преобразователем при изменении нагрузки, прогнозируют исходя из текущего значения фазы тока сети, текущего значения нагрузки и заданного значения нагрузки. При этом регулирование преобразователя осуществляют в области допустимых параметров работы. Техническим результатом является обеспечение точности определения фазы вектора тока сети четырехквадрантного преобразователя при изменении нагрузки, исключение недопустимых параметров регулирования, снижение требований к ресурсам системы регулирования. 6 ил.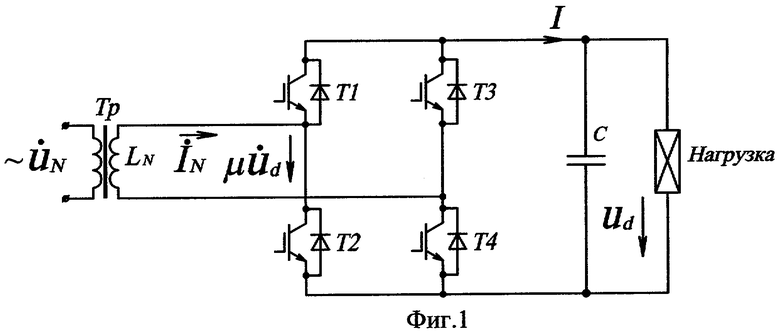
Способ прогнозирующего векторного регулирования четырехквадрантного преобразователя, состоящий в том, что фазу вектора тока сети в каждом полупериоде питающего напряжения регулируют изменением модуляции входного напряжения коммутацией вентилей четырехквадрантного преобразователя, отличающийся тем, что формируют массив значений М потребляемой мощности преобразователя, элементами которого являются допустимые значения фазы вектора тока сети и угла нагрузки, формируют массив прогнозных значений F фазы вектора тока сети, элементами которого являются текущее значение фазы вектора тока сети, текущее значение угла нагрузки и изменение угла нагрузки от текущего значения, которые будучи реализованы, дают различимые комбинации управляющих воздействий, соответствующих допустимой потребляемой мощности преобразователя, причем прогнозное изменение фазы Δϕ вектора тока сети в зависимости от текущего значения фазы вектора тока сети и текущего значения угла нагрузки при изменении угла нагрузки определяют по формуле
где ϕ - текущее значение фазы вектора тока сети;
ψ - текущее значение угла нагрузки;
Δψ - изменение угла нагрузки.
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2000 |
|
RU2187185C2 |
| СПОСОБ И ЭЛЕКТРИЧЕСКАЯ ЦЕПЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1997 |
|
RU2177883C2 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| US 4629959 A, 16.12.1986 | |||
| DE 3301496 A, 19.07.1984 | |||
| DE 4138256 A, 27.05.1993 | |||
| Шихта для наплавки | 1974 |
|
SU500950A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |

