113
Изобретение относится к машиностроению и может быть использовано в промьшшенных роботах.
Целью изобретения является упрощение конструкции манипулятора путем сокращения числа кинематических пар.
На чертеже показана кинематическая, схема манипулятора.
Манипулятор содержит основание 1, каретки 2-4 с приводами 5-7, установленные в кольцевой направляющей 8, гидроципиндры 9-11, своими щтоками 12-14 связанные с помощью вращательных пар 15-17 с каретками 2-4, а своими гильзами 18-20 с помощью сферических пар 21-23 - с ведомым звеном 24.
Основание 1, каретки 2-4, гидрр- цилиндры 9-11, ведомое звено 24 и кинематические пары 15-17 и 21-23 образуют пространственный механизм, имитирующий руку робота и представляющий собой замкнутую кинематическую цепь. Ведомое звено 24 жестко связано с захватным устройством 25.
Манипулятор работает следующим образом.
При подаче управляющего силового воздействий на приводы 5-7 происходит перемещение кареток 2-4 по направляющей В. В результате этого изменяется положение гидроцилиндров 9-11, связанных с каретками 2-4. При подаче управляющего силового воздействия на гидроцилиндры 9-11 происходит изменение положения в пространстве ведомоРедактор И.Николайчук
Составитель Е.Петраков
Техред н. Глущенко Корректор Г. Решетник
Заказ 2258/17
Тираж 953 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производствейно-полиграфическое предприя.тие, г. Ужгород, ул. Проектная, 4
52902
го звена 24. Одновременная .подача управляющего силового воздействия на силовые приводы 5-7 и 9-11 обеспечивает шесть степеней подвижности
с выходного звена- 24 и жестко связанного с ним захватного устройства 25, а также плоскопараллельное его перемещение. I.
10 При движении- кареток 2-4 с одинаковой скоростью и при равенстве вылетов штоков 12-14 гидроципиндров 9-11 происходит вращение ведомого звена 24 на требуемьй угол вокруг оси, пер1Д пендикулярной плоскости основания.
Формула изобретения
Манипулятор, содержащий.основание, по крайней мере шесть приводных звеньев, три из которых выполнены в виде кареток, размещенных на кольцевой направляющей, установленной на основании, причем приводные звенья кинематически с помощью цилиндрических и сферических пар и тяг связаны с ведо- ым звеном, на котором установлено захватное устройство, отличаю- щ Ч и с я тем, что, с целью упрощения конструкции, остальные приводные звенья выполнены в виде силовых цилиндров, шток каждого из которых с помощью цилиндрической пары связан с кареткой, а на его корпусе закреп- лена тяга, связанная сферической па-: рой с ведомым звеном.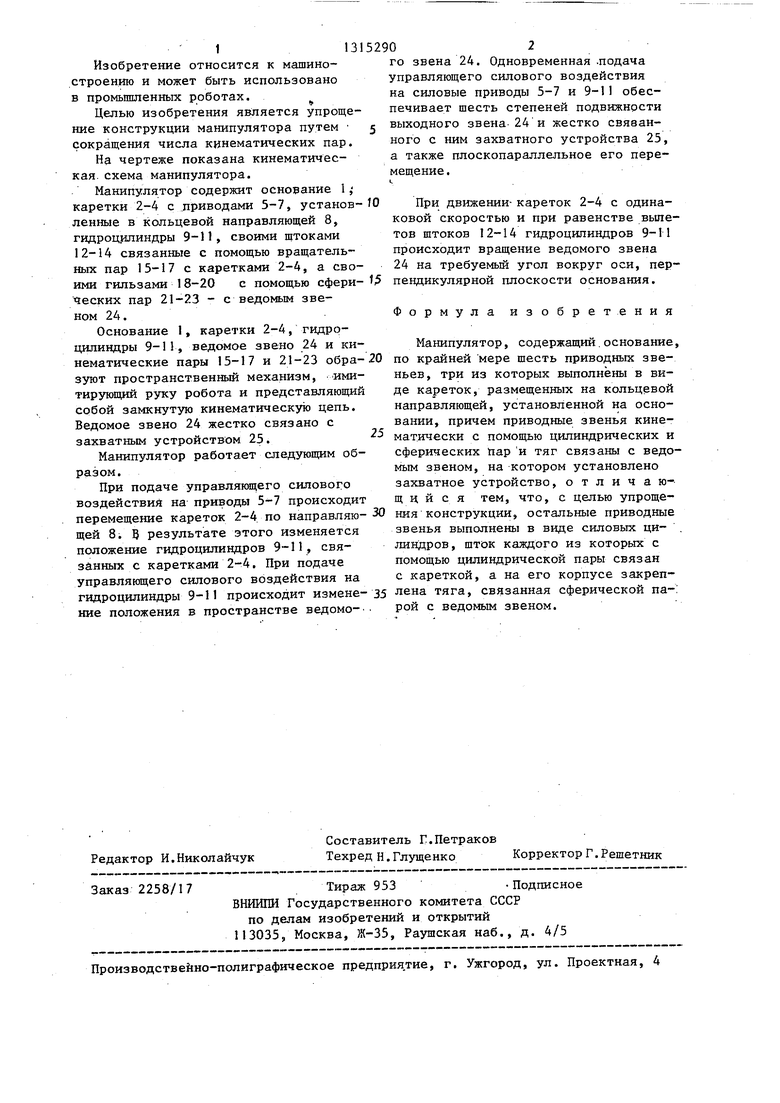
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Модульный манипулятор | 1980 |
|
SU952578A1 |
Изобретение может быть использовано при создании промышленных роботов. Целью изобретения является упрощение конструкции манипулятора путем сокращения кинематических пар. Манипулятор содержит основание 1, каретки 2,3,4 с приводами 5,6,7, установленные на кольцевой направляющей .8, Гидроцилиндры 9,10,11 своими штоками связаны с каретками вращательными парами 15,16,17 и своими корпусами связаны сферическими парами 21,22,23 с ведомым звеном 24, на котором закреплено захватное устройство 25. 1 ил. 6 (Л Сл2
| Манипулятор | 1982 |
|
SU1049244A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
