Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов.
Известен исполнительный механизм робота (а.с. СССР №1798176, кл. В 25 J 9/00, 1993), содержащий основание, два основных кривошипа, шарнирно связанные одними концами с приводными двигателями, установленными на основании, другими - с двумя основными шатунами, шарнирно связанных между собой, и дополнительный шатун, шарнирно соединенный с дополнительным кривошипом, причем два шатуна, соответственно, основной и дополнительный, выполнены в виде треугольных рычагов и снабжены захватами. Данный исполнительный механизм робота может осуществлять одновременное манипулирование двумя объектами.
Недостатком указанного исполнительного механизма робота является то, что позиционирование объектов дополнительным захватом происходит после фиксации движения основного захвата и приводит к резкому снижению скорости перемещения объектов с одной позиции на другую. Это способствует увеличению погрешности манипулирования объектами двумя захватами, что является недопустимым. Следует отметить, что для обеспечения транспортировки более двух объектов за счет одновременной работы захватов потребуются усложнения конструкции. Кроме того, исполнительный механизм робота является плоским и не может обеспечить манипулирование объектами в трехмерном пространстве.
Наиболее близким аналогом к изобретению является пространственный исполнительный механизм робота (предварительный патент РК №9242, кл. В 25 J 9/00, 2000), содержащий основание, три кривошипа с одинаковыми приводами вращательных движений, расположенных на взаимно перпендикулярных осях трехмерного пространства и связанных шарнирами треугольными рычагами, снабженными схватами и соединенных между собой сферическими шарнирами дополнительным треугольным рычагом. Данный исполнительный механизм робота может осуществлять одновременное манипулирование тремя объектами.
Недостатком данного пространственного исполнительного механизма робота заключается в том, что треугольные рычаги связаны между собой дополнительным треугольным рычагом, выполненным в виде одной детали с жестким треугольным контуром, стороны которой имеют постоянные линейные размеры. Это существенно ограничивает манипулирование объектом в пространстве.
Задача изобретения состоит в создании пространственного регулируемого исполнительного механизма робота, расположенного на взаимно перпендикулярных осях трехмерного пространства, обеспечивающего одинаковыми приводами вращательных движений и регулирующими звеньями, выполненными в виде гидроцилиндров, позиционирование объектов различных, конфигурации и формы в трехмерном пространстве без ограничения манипулирования.
Для этого пространственный регулируемый исполнительный механизм робота, содержащий основание, три привода вращательных движений, расположенных на трех взаимно перпендикулярных осях трехмерного пространства, шарнирно связанные с ними три кривошипа, шарнирно связанные с кривошипами первый, второй, третий треугольный рычаги, содержащие схваты, согласно изобретению снабжен платформой, приводным рычагом с дополнительным приводом вращательных движений и тремя регулирующими звеньями, выполненными в виде гидроцилиндров и соединяющими между собой первый, второй и третий треугольные рычаги, при этом платформа шарнирно соединена с тремя кривошипами, приводной рычаг шарнирно соединен с платформой дополнительным приводом вращательных движений и основанием.
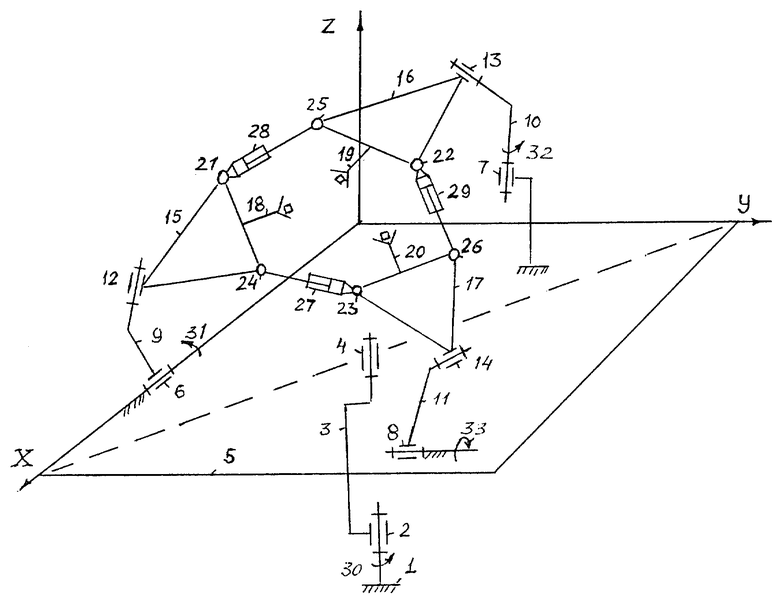
На чертеже показана кинематическая схема пространственного регулируемого исполнительного механизма робота.
Пространственный регулируемый исполнительный механизм робота содержит основание 1. С ним шарниром 2 соединен приводной рычаг 3 с дополнительным приводом вращательных движений 30, связанный через одноподвижный шарнир 4 с платформой 5, которая посредством шарниров 6, 7, 8 связана, с кривошипами 9, 10, 11 и с одинаковыми приводами вращательных движений 31, 32, 33, расположенными на осях трехмерного пространства. Кривошипы 9, 10, 11 соединены между собой шарнирами 12, 13, 14 через первый 15, второй 16, третий 17 треугольные рычаги, содержащие, соответственно, схваты 18, 19, 20, причем первый 15, второй 16, третий 17 треугольные рычаги соединены между собой посредством двухподвижных 21, 22, 23 и трехподвижных 24, 25, 26 сферических шарниров и с регулирующими звеньями 27, 28, 29, выполненными в виде гидроцилиндров. Регулирующие звенья 27, 28, 29 предназначены для изменения расстояния между шарнирами 21 и 25, 22 и 26, 23 и 24. Система рычагов 15, 16, 17 и звеньев 27, 28, 29 представляет собой замкнутый изменяющийся многоугольник, выполненный в виде пространственной группы Ассура VI класса.
Пространственный регулируемый исполнительный механизм робота работает следующим образом.
При воздействии, например, дополнительным приводом вращательных движений 30 на приводной рычаг 3 платформа 5 совершает вращение вокруг оси шарнира 4. Движение приводов вращательных движений 31, 32, 33 вокруг шарниров 6, 7, 8, расположенных на взаимно перпендикулярных осях трехмерного пространства, передается через кривошипы 9, 10, 11 на треугольные рычаги 15, 16, 17, содержащие соответственно схваты 18, 19, 20, для их позиционирования в рабочей зоне, соединенные между собой регулирующими звеньями 27, 28, 29, выполненными в виде гидроцилиндров.
При фиксированных положениях гидроцилиндров регулирующих звеньев 27, 28, 29 работа механизма может осуществляться в различных режимах, в зависимости от расположения объекта в пространстве. При включенных гидроцилиндрах регулирующих звеньев 27, 28, 29 механизм может осуществлять манипулирование в пространстве с учетом конфигурации и формы объекта. Регулирующие звенья 27, 28, 29 с включенными гидроцилиндрами при фиксированных положениях кривошипов 9, 10, 11 приводят в движение систему рычагов 15, 16, 17 и звеньев 27, 28, 29, выполненную в виде пространственной группы Ассура VI класса, которая может осуществлять манипулирование схватами в рабочей зоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
Изобретение относится к машиностроению и может быть использовано в исполнительных механизмах роботов и манипуляторов. Устройство содержит основание, три привода вращательных движений, расположенных на трех взаимно перпендикулярных осях трехмерного пространства, шарнирно связанные с ними три кривошипа, шарнирно связанные с кривошипами первой, второй, третий треугольные рычаги, содержащие схваты. Устройство снабжено платформой, приводным рычагом с дополнительным приводом вращательных движений и тремя регулирующими звеньями, выполненными в виде гидроцилиндров и соединяющими между собой первый, второй, и третий рычаги. При этом платформа шарнирно соединена с тремя кривошипами, приводной рычаг шарнирно соединен с платформой дополнительным приводом вращательных движений и основанием. Изобретение позволяет создать пространственно регулируемый исполнительный механизм робота, обеспечивающего одинаковыми приводами вращательных движений и регулирующими звеньями позиционирование объектов различной конфигурации и формы в трехмерном пространстве без ограничения манипулирования. 1 ил.
Пространственный регулируемый исполнительный механизм робота, содержащий основание, три привода вращательных движений, расположенных на трех взаимно перпендикулярных осях трехмерного пространства, шарнирно связанные с ними три кривошипа, шарнирно связанные с кривошипами первой, второй, третий треугольные рычаги, содержащие схваты, отличающийся тем, что он снабжен платформой, приводным рычагом с дополнительным приводом вращательных движений и тремя регулирующими звеньями, выполненными в виде гидроцилиндров и соединяющими между собой первый, второй и третий рычаги, при этом платформа шарнирно соединена с тремя кривошипами, приводной рычаг шарнирно соединен с платформой, дополнительным приводом вращательных движений и основанием.
| Державка для точения и праки пластинчатых двулезвенных клинков безопасных бритв | 1927 |
|
SU9242A1 |
| Исполнительный механизм робота | 1991 |
|
SU1798176A1 |
| Исполнительный механизм робота | 1990 |
|
SU1722806A1 |
| Манипулятор | 1979 |
|
SU861061A1 |

