Изобретение относится к области измерительной гироскопической техники и может быть использовано в геодезической и навигационной аппаратуре наземных транспортных средств.
По вопросам гироскопии существует обширная литература, например [1, 2, 3].
Известна система определения положения оси наземного транспортного средства относительно направления на Север [4], которая принята за прототип заявляемого устройства.
Устройство-прототип, определяющее направление на Север, состоит из блока азимутального и блока горизонтального (горизонтальной платформы). Гироскоп блока азимутального имеет горизонтальную ось собственного вращения.
При определении направления на Север в устройстве-прототипе осуществляется привод оси гироскопа блока азимутального в плоскость меридиана с помощью следящей системы, при этом изменение чувствительности датчика угла, датчика момента и усилителя приводит к погрешности измерения, что является недостатком прототипа.
Изобретение направлено на уменьшение погрешности определения направления на Север (направления меридиана).
Сущность изобретения заключается в том, что в устройство, состоящее из горизонтальной платформы и гироскопа с системой стабилизации положения ротора относительно Земли, включающей в себя два комплекта последовательно соединенных датчиков угла, усилителей и датчиков момента, при этом соответствующие датчики угла и момента установлены на ортогональных осях, введены устройство разворота гироскопа в горизонте и блок вычисления, причем в качестве гироскопа применен гироскоп с упругим подвесом ротора в горизонте, выходы усилителей соединены с соответствующими входами блока вычисления, выход которого является выходом устройства определения направления на Север.
На чертеже изображена схема заявляемого устройства.
Предлагаемое устройство определения направления на Север содержит горизонтальную платформу 1, гироскоп 2 с системой стабилизации положения ротора относительно Земли, включающей в себя два комплекта последовательно соединенных датчиков угла 3, 4, усилителей 5, 6 и датчиков момента 7, 8, при этом соответствующие датчики угла и датчики момента расположены на ортогональных осях, а для увеличения точности определения в него введены устройство разворота 9 гироскопа 2 в горизонте и блок вычисления 10, причем в качестве гироскопа применен гироскоп с упругим подвесом ротора в горизонте, выходы усилителей соединены с соответствующими входами блока вычисления, выход которого является выходом устройства определения направления на Север.
Заявленное устройство работает следующим образом.
При отсутствии движения горизонтальной платформы 1 относительно Земли включают устройство. Автоматические следящие системы в составе датчика угла 3, усилителя 5, датчика момента 7 и датчика угла 4, усилителя 6, датчика момента 8 обнаруживают уход ротора гироскопа 2 из горизонта и с помощью датчиков момента, задавая прецессии вокруг соответствующих осей, возвращают ротор в горизонт.
Вследствие вращения Земли и стремления ротора гироскопа сохранять неизменным свое положение в системе координат, связанной со звездами, ротор гироскопа будет несколько отставать от горизонта, а следящие системы будут иметь некоторое рассогласование. В стационарном состоянии скорости вращения ротора гироскопа вокруг ортогональных осей чувствительности будут равны соответствующим проекциям горизонтальной составляющей угловой скорости вращения Земли на эти оси, а на выходах усилителей 5 и 6 будут иметь место сигналы, величины которых теоретически равны:
V7 = Δω7+к7(t)•ωзг•cosα,
V8 = Δω8+к8(t)•ωзг•sinα,
где V7,8 - сигналы на выходах усилителей 5, 6 (на входах блоков 7, 8) соответственно;
Δω7,8 - аддитивные составляющие выходных сигналов усилителей 5, 6;
к7,8 - усиление контуров стабилизации;
ωзг - горизонтальная составляющая угловой скорости вращения Земли;
α - угол между направлением на Север и осью чувствительности (одной из двух ортогональных).
При регистрации сигналов на 3-х разных углах: α, α±90o и α±180o в одном запуске величины сигналов (для V7) равны:
v

Поскольку время между измерениями невелико, то с большой точностью можно допустить:
С учетом этого из выражений для v7 I и v7 II получаем:
что в свою очередь позволяет получить
и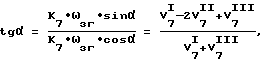
а
Аналогичные выражения получаются и для V8, что позволяет получить второе приборное значение α, определить выходное значение угла среднеарифметическое двух значений: 
Все вычисления по этому алгоритму совершает блок вычисления 10.
Перед началом практических вычислений осуществляется юстировка. Поскольку гироскоп с системой удержания его ротора в горизонте является датчиком угловой скорости вращения Земли (ДУС), то оператор разворачивает ДУС в горизонте до грубого совпадения биссектрисы между его ортогональными осями чувствительности с направлением на Север, определяемым по буссолям теодолита.
После достижения стационарного состояния оператор дает команду на запоминание сигналов v7 I и v8 I и разворачивает ДУС в любую сторону на 90o и после достижения стационарного состояния дает команду на запоминание сигналов v7 II и v8 II.
Затем оператор разворачивает ДУС в ту же сторону еще на 90o и после достижения стационарного состояния дает команду на запоминание сигналов v7 III и v8 III, которая одновременно является командой на вычисление α.
После снятия показаний устройство может быть выключено.
Анализ работы показывает, что заявленное устройство учитывает конкретные значения параметров сигналов и обеспечивает проведение измерений с большей, чем у прототипа, точностью.
При этом для реализации изобретения нет необходимости разрабатывать новые приборы, т.к. горизонтирование и юстировку ДУС можно обеспечить, разместив его на теодолите. А в качестве гироскопа может быть взят серийно выпускаемый динамически настроенный гироскоп (гироскоп с упругим подвесом) типа ГВК-6.
Проведенные испытания макета показали, что определение направления на Север с помощью заявляемого устройства производится с большей точностью, чем с помощью устройства-прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АЗИМУТА ОСИ | 2005 |
|
RU2289787C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2002 |
|
RU2215993C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2002 |
|
RU2215263C1 |
Использование: в геодезической аппаратуре и аппаратуре счисления координат наземных транспортных средств. Сущность: устройство представляет собой гироскоп с упругим подвесом ротора и вертикальной осью. Гироскоп размещен на горизонтальной платформе с обеспечением разворота ротора в горизонте для обеспечения снятия показаний с усилителей стабилизации ротора в горизонте на 3-х углах, разнесенных на ±90 и ±180o, и с вычислением угла направления на Север по алгоритму, определяющему конкретные значения аддитивной и мультипликативной составляющей сигналов. Технический результат: уменьшение погрешности определения направления на Север. 1 з.п. ф-лы, 1 ил.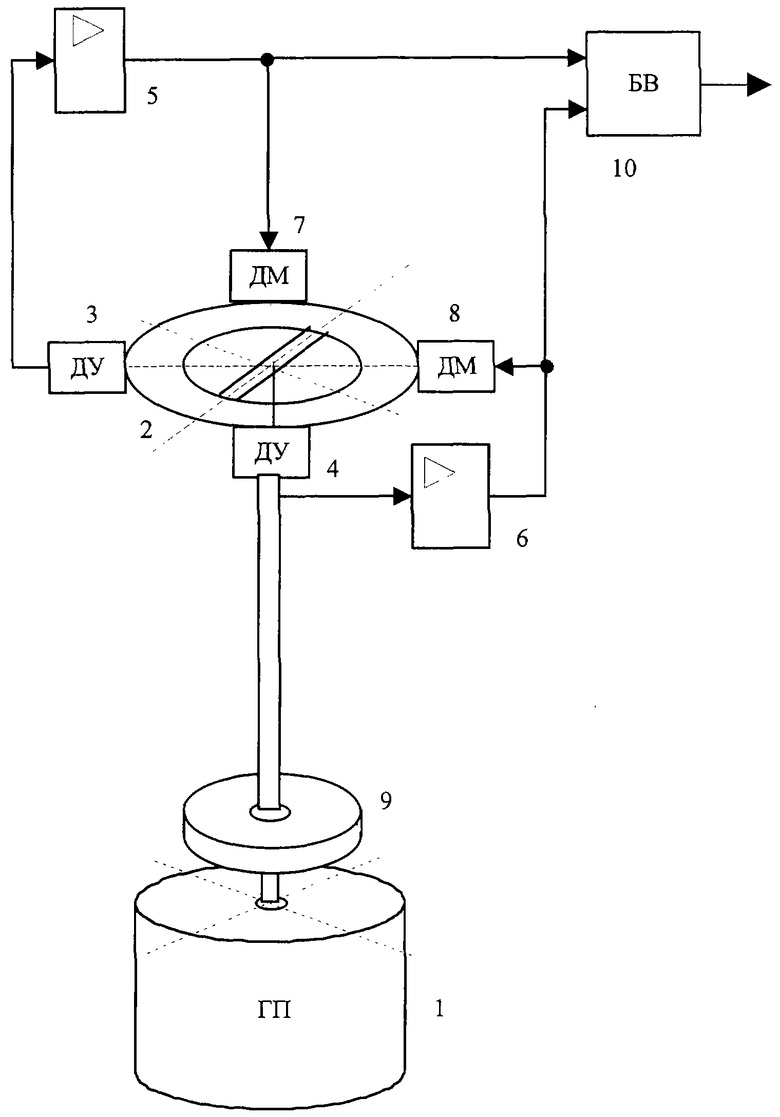
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| DE 3019372 А, 26.11.1981 | |||
| US 4530164 А, 23.07.1985. | |||

