Изобретение относится к области терминального управления траекторным движением разгонных блоков, выводящих космические аппараты на заданные орбиты с помощью маршевого двигателя с нерегулируемой тягой.
Для таких разгонных блоков одной из операций терминального управления, периодически выполняемого в процессе реализации активного маневра, является прогноз длительности маневра и, соответственно, времени отсечки маршевого двигателя, определяемых из условия достижения заданного значения принятого функционала, например функционала энергии. Для прогноза длительности маневра и времени отсечки маршевого двигателя в качестве модели прогноза траекторного движения разгонного блока используется система уравнений
где  вектор абсолютной скорости;
вектор абсолютной скорости; радиус-вектор;
радиус-вектор; ускорение, развиваемое тягой маршевого двигателя;
ускорение, развиваемое тягой маршевого двигателя; единичный вектор тяги;
единичный вектор тяги; вектор гравитационного ускорения.
вектор гравитационного ускорения.
Прогноз параметров движения выполняется путем численного интегрирования модели движения с периодичностью решения терминальной задачи управления.
Известен способ определения момента времени окончания маневра и отсечки маршевого двигателя на основе численного прогноза движения разгонного блока, заключающийся в том, что на каждом такте (шаге) терминального управления прогнозируют движение с фиксированным шагом интегрирования по времени, равным отношению прогнозируемой длительности маневра к предварительно заданному количеству шагов интегрирования модели движения, причем прогнозируемую длительность маневра на первом цикле терминального управления принимают равной заданной, а на последующих циклах - равной длительности, полученной на предыдущем цикле, уменьшают шаг интегрирования до минимально допустимого, прогнозируют моменты времени окончания маневра и отсечки маршевого двигателя путем суммирования длительности выполненных шагов интегрирования до момента достижения вычисленным значением функционала энергии заданного значения [1].
Интегрирование выполняется с фиксированным шагом по времени, а в конце интервала интегрирования производится уменьшение шага с целью точного определения времени tf окончания текущего маневра и отсечки маршевого двигателя из условия достижения текущим функционалом энергии F заданного в полетном задании значения Ff
F = Ff, (2)
V, R - модули вектора абсолютной скорости и радиус-вектора соответственно;
В0 - гравитационная постоянная.
Фиксированный шаг интегрирования Н назначается путем деления интервала времени от начала интегрирования t0 до предполагаемого времени окончания маневра tf на n частей
где Н - фиксированный шаг интегрирования;
tf - время окончания маневра;
t0 - время начала интегрирования;
n - количество заданных шагов интегрирования.
Время tf для первого интегрирования задается в полетном задании, а для последующих циклов терминального управления берется равным значению с предыдущего цикла управления.
При малых значениях n обеспечивается высокое быстродействие терминального управления, но уменьшается точность вычисления параметров движения разгонного блока. При больших значениях n увеличивается объем вычислений и общее время формирования очередного цикла управления. На практике принимают n = 10.
На последнем интервале интегрирования шаг интегрирования принимается равным значению требуемой точности ΔT определения времени tf и количество шагов интегрирования на этом интервале будет
где Кш - количество шагов интегрирования;
ΔT - такт счета бортовой цифровой вычислительной машины.
Прогнозируемое время tf маневра и отсечки маршевого двигателя определяется по формуле
tf = t0 + tд,
где tд - время, равное сумме выполненных шагов интегрирования, до выполнения условия (2)
Недостатком такого способа является большое количество шагов интегрирования на последнем интервале. Так для длительного маневра с начальной разницей tf-t0, равной 2200 с и при ΔT = 0,1 с при n = 10 количество шагов на конечном интервале интегрирования равно значению Кш = 2200, что приводит к значительным затратам времени счета бортовой цифровой вычислительной машины.
Техническим результатом изобретения является сокращение объема вычислений и шагов интегрирования в задаче прогнозирования времени отсечки маршевого двигателя.
Указанный технический результат достигается тем, что в известный способ определения момента времени окончания маневра и отсечки маршевого двигателя на основе численного прогноза движения разгонного блока, заключающийся в том, что на каждом такте терминального управления прогнозируют движение с фиксированным шагом интегрирования по времени, равным отношению прогнозируемой длительности маневра к предварительно заданному количеству шагов интегрирования модели движения, причем прогнозируемую длительность маневра на первом цикле терминального управления принимают равной заданной, а на последующих циклах - равной длительности, полученной на предыдущем цикле, уменьшают шаг интегрирования до минимально допустимого, прогнозируют моменты времени окончания маневра и отсечки маршевого двигателя путем суммирования длительности выполненных шагов интегрирования до момента достижения вычисленным значением функционала энергии заданного значения, вводят за три фиксированных шага до конца интегрирования модели движения разгонного блока определение скорости изменения функционала энергии, оценивают оставшееся время до конца интегрирования как отношение разности заданного значения функционала энергии и вычисленного к скорости изменения функционала энергии, при непревышении оставшегося времени шага интегрирования последующий шаг интегрирования устанавливают равным 0,9 оставшегося времени интегрирования до тех пор, пока шаг интегрирования не станет равным минимально допустимому.
Для решения этой задачи за три фиксированных шага до конца интегрирования вычисляется на каждом шагу производная по времени функционала энергии
где  производные по скорости и радиусу, определяемые в процессе расчета правых частей системы уравнений (1).
производные по скорости и радиусу, определяемые в процессе расчета правых частей системы уравнений (1).
Оценка времени Δtf, оставшегося до конца интегрирования, вычисляется по формуле
При  выполняется уменьшение последующих шагов по зависимости
выполняется уменьшение последующих шагов по зависимости
Н = 0,9•Δtf.
Для оценки количества шагов интегрирования с изменяемым шагом учтем, что на каждом последующем шаге время Δtf будет уменьшаться на шаг интегрирования и в результате за l шагов интегрирования его величина уменьшится до значения Δtf (l):
Δtf(l) = 0,1l•Δtf0, (3)
где Δtf0 - начальное значение Δtf, при изменении шага интегрирования.
Величина Δtf(l) определяет требуемую точность вычисления прогнозируемого момента отсечки маршевого двигателя. Если требуемая точность равна такту счета бортовой цифровой вычислительной машины и этот такт равен Тц = 0,032 с, то из уравнения (3) следует, что
l = 1,495 + ln(Δtf).
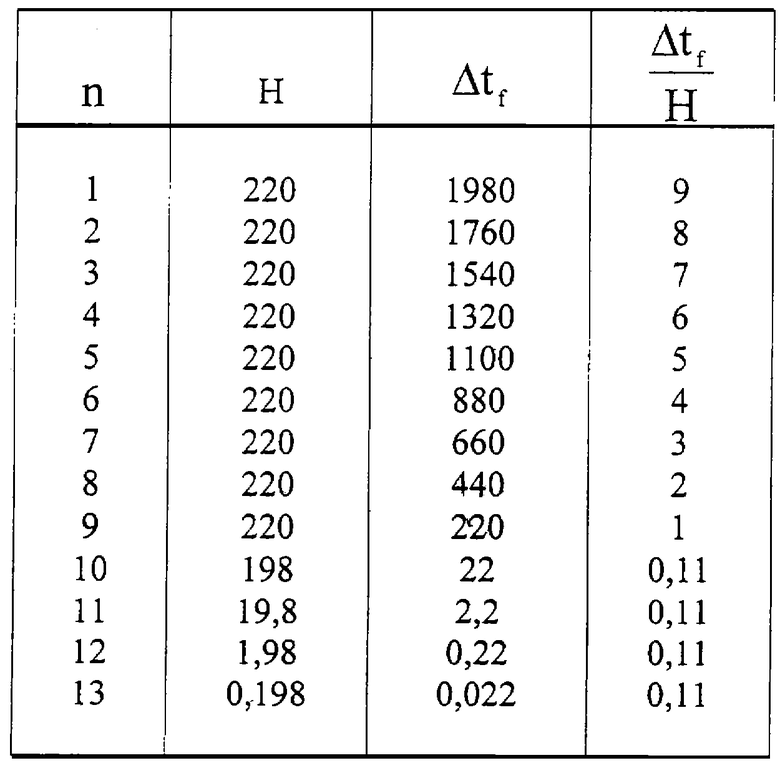
Для фиксированного шага Н = 220 с l = 3,83, то есть за 4 переменных шага интегрирования обеспечивается требуемая точность определения времени отсечки маршевого двигателя.
В таблице приведены шаги интегрирования на каждом такте при начальном значении разности tf-t0, равной 2200 с.
На 13-м шаге интегрирования от начала решения задачи величина Δtf становится меньше такта Тц бортовой цифровой вычислительной машины и на этом интегрирование заканчивается с прогнозируемым временем отсечки маршевого двигателя
tf = t0 + 2199,978 с.
Литература.
1. Сыров А.С., Соколов В.Н., Ежов В.В., Кислик Л.И. Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью. Авиакосмическая техника и технология, 1998, 1, с.31-33.
Изобретение относится к космической технике, а более конкретно к бортовым средствам терминального управления разгонных блоков с нерегулируемыми маршевыми ракетными двигателями. В предлагаемом способе на каждом такте терминального управления прогнозируют движение с фиксированным шагом интегрирования модели движения разгонного блока. Прогнозируемую длительность маневра разгонного блока на первом такте принимают равной заданной, а на последующих тактах - полученной на предыдущем такте. Уменьшают шаг интегрирования до минимально допустимого, прогнозируя моменты окончания маневра и отсечки двигателя путем суммирования длительности выполненных шагов интегрирования до момента достижения значением функционала энергии разгонного блока заданного значения. При этом за три фиксированных шага до конца интегрирования определяют скорость изменения указанного функционала энергии и по ней оценивают оставшееся время до конца интегрирования. При непревышении оставшимся временем шага интегрирования последующий шаг интегрирования устанавливают равным 0,9 этого оставшегося времени. Так действуют до тех пор, пока шаг интегрирования не станет равным минимально допустимому. Изобретение направлено на сокращение объема вычислений и шагов интегрирования при прогнозировании времени отсечки маршевого ракетного двигателя разгонного блока. 1 табл.
Способ определения момента времени окончания маневра и отсечки маршевого двигателя на основе численного прогноза движения разгонного блока, заключающийся в том, что на каждом такте терминального управления прогнозируют движение с фиксированным шагом интегрирования по времени, равным отношению прогнозируемой длительности маневра к предварительно заданному количеству шагов интегрирования модели движения разгонного блока, причем прогнозируемую длительность маневра разгонного блока на первом такте терминального управления принимают равной заданной, а на последующих тактах - равной длительности, полученной на предыдущем такте, уменьшают шаг интегрирования до минимально допустимого, прогнозируют моменты времени окончания маневра и отсечки маршевого двигателя путем суммирования длительности выполненных шагов интегрирования до момента достижения вычисленным значением функционала энергии разгонного блока заданного значения, отличающийся тем, что за три фиксированных шага до конца интегрирования модели движения разгонного блока определяют скорость изменения указанного функционала энергии, оценивают оставшееся время до конца интегрирования как отношение разности заданного и вычисленного значений функционала энергии к скорости изменения функционала энергии, и при непревышении оставшимся временем шага интегрирования последующий шаг интегрирования устанавливают равным 0,9 этого оставшегося времени интегрирования, действуя так до тех пор, пока шаг интегрирования не станет равным минимально допустимому.
| СЫРОВ А.С., СОКОЛОВ В.Н | |||
| и др | |||
| Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью | |||
| Авиакосмическая техника и технология | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| В.П.ПЕТРОВ, А.А.СОЧИВКО | |||
| Управление ракетами | |||
| - М.: Воениздат, 1963, с.143-145 | |||
| RU 94029548 А1, 20.06.1996 | |||
| US 4470562 А, 11.09.1984. | |||
