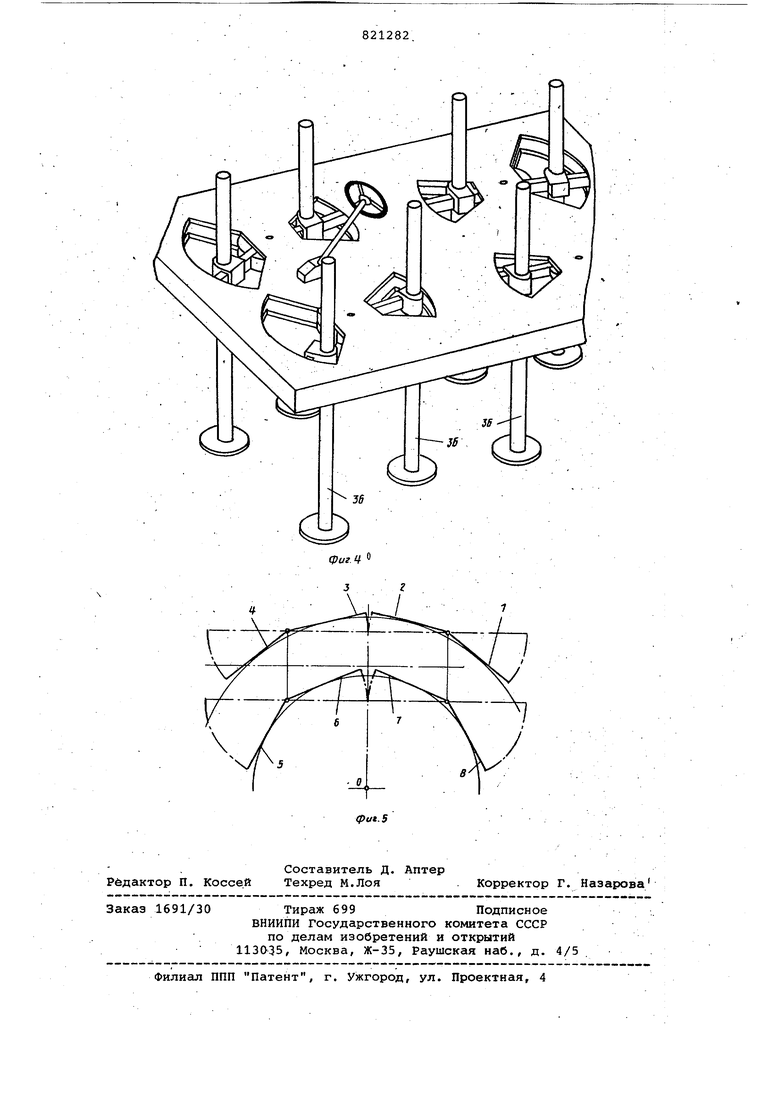
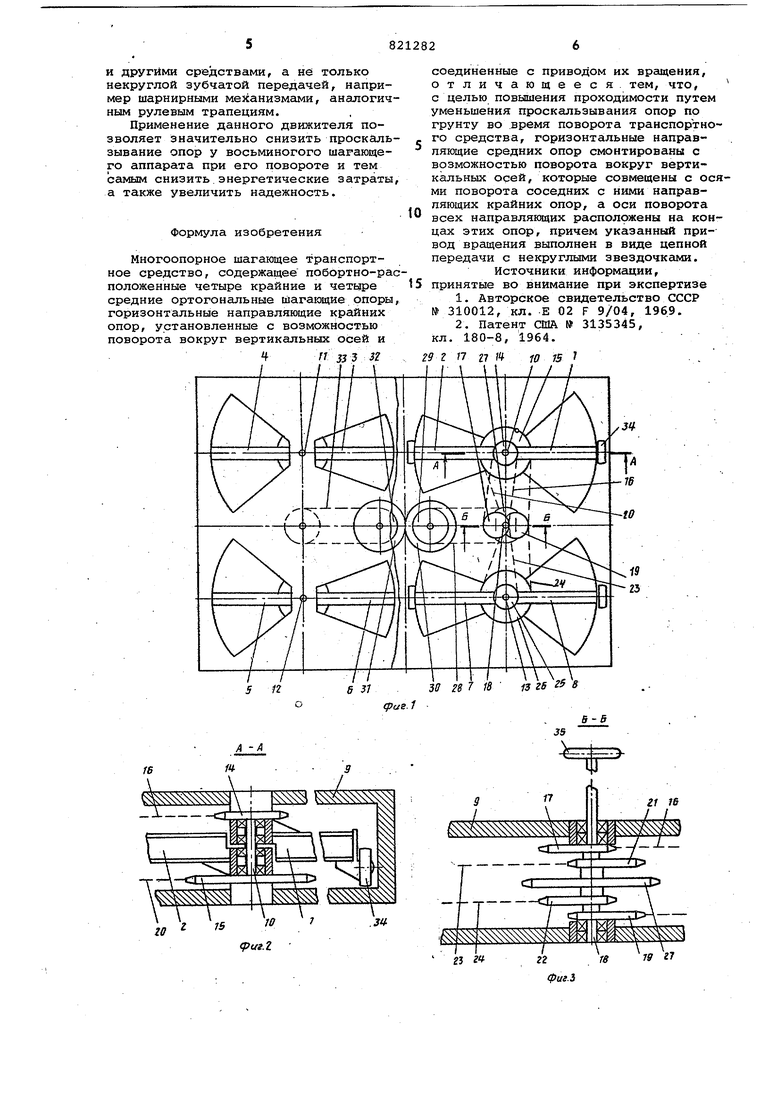
(54) МНОГООПОРНОЕ ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО Цель изобретения - повышение проходимости путем уменьшения проскальз вания опор по грунту во время поворота транспортного средства. Поставленная цель достигается тем что горизонтальные направляющие сред них, опор смонтированы с возможностью поворота вокруг вертикальных осей, которые совмещены с осями поворота соседних с ними направляющих крайних опор, а оси псЭворота всех направ ляющих расположены на концах этих опор, причем указанный привод вращения выполнен в виде цепной передачи С некруглыми звездочками. Этим обеспечивается возможность установки упо мянутых направляющих каждого борта п касательным .и концентрическим окружностям, проведенным из центра поворота корпуса движителя. На фиг. 1 изображен восьминогий шагающий движитель,, вид сверху; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 - изометрическое изобргикение восьминогого движителя; на фиг. 5 - схема расположения горизонтальных направляющих всех ортогональных опор восьминогого шагающего движителя на .повороте. Шагающий движитель содержит восем ортогональных шагающих опор, горизон тальные направляющие 1-8 которых установлены на корпусе 9 поворотно, при этом направляющие 1 и 2 имеют обычную ось 10. Точно также пара направляющих 3 и 4 имеет общую ось 11, пара 5 и 6 - ось 12 и пара 7 и 8 - ось 13. С каждой направляющей жестко скреплена звездочка цепной передачи. Например, с направляющей 1 скреплена звездочка 14, с направляющей 2 - зве дочка 15. Звездочка 14 цепью 16 связана с некруглой звездочкой 17, сидя щей на валу 18. На последнем сидит н круглая звездочка 19, связанная цепь 20 со зв ездочкой 15. На валу 18 имеется пара жестко связанных с ним некруглых звездочек 21 и 22, которые ц пями 23 и 24 св.язаны со звездочками 25 и 26 соответственно. Звездочка 25 жестко скреплена с направляющей 8, а звездочка 26 - с направляющей 7. В середине вала 18 жестко прикреплена к нему звездочка 27, связанная цепью 28 со звездочкой 29. На одном валу со звездочкой 29 сидит жестко соединенная с ней шестерня 30, находящаяся в зацеплении сшестерней 31. С последней жестко соединена сидящая с ней на одном валу звездочка 32 с цепью 33. Цепь 33 связана с направляющими 3-6 аналогично тому, ;как цепь 28 связана с передними направляющими 1, 2 и 7, 8. На конце каждои направляющей прикреплены ролики 34. С валом 18 связано рулевое колесо 35. На направляющих 1-8 установ лены ноги 36 машины, имеющие возможность перемещаться возвратно-поступательно по направляющим под деист вием своих приводов горизонтального перемещения. Кроме того, имеется отдельный, привод для вертикального подъема и опускания ног и схема управления ля координации работы -горизонтального и вертикального привода каждой ноги (не показаны). Предложенное устройство работает следующим образом. При необходимости изменить направление движения водитель поворачивает рулевое колесо 35, например вправо. При этом связанный с ним вал 18 и жестко скрепленные с валом некруглые звездочки 17, 21, 22 и 27 также .поворачиваются по часовой стрелке. Этот поворот через цепи 16 и 20 передается звездочкам 14 и 15, заставляя поворачиваться й естко скрепленные с этими звездочками левые направляющие 1 и 2 по часовой стрелке. Вследствие того, что звездочка 15 имеет вдвое большее,число зубьев, чем звездочка 14, угол отклонения средней направляющей 2 будет примерно вдвое меньшим, чем угол отклонения крайней направляющей 1. Правые направляющие 7 и 8 также отклоняются по часовой стрелке под действием цепей 23 и 24, приводимые некруглЕдми звездочками 21 и 22. Угол поворота направлягацей 8 примерно вдвое больше угла поворота Направляющей 7. Жестко посаженная на ори 10 звездочка 27 через цепь 28 приводит во вргицение (по часовой стрелке) зубчатую,шестерню 30, которая сцеплена с одинаковой с ним шестерней 31. Поэтому шестерня 30 и связанная с ним звездочка 32 поворачивается на тот же угол-, но против часовой стрелки. Цепь 33 заставляет все задние направляющие 3-6 поворачиваться против часовой стрелки на углы, равные соответствующим углам передних направляквдих. Звездочки 17, 19, 21 и 22 на переднем управляющем валу 18, как и аналогичные, им звездочки на Зсщнем управляющем валу сделаны некруглыми, чтобы осуществить неодинаковый поворот направляющих, обеспечивающий расположение их по касательным к концентричным окружностям, проводимым из центра поворота корпуса движителя (фиг. 5), где линиями показано расположение направляющих на повороте, а пунктирными линиями - при прямолинейном движении аппарата.. Расположение направляющих (фиг.5) позволяет при задании всем опорам одного борта одной и той же скорости относительно направляющих минимизировать взаимное проскальзывание ног по земле и снизить энергетические затраты на ходьбу и вероятность поломки ног. Такой взаимный поворот направляющих может быть осуществлен и другйлш средствами, а не только некруглой зубчатой передачей, например шарнирными механизмами, аналогич ным рулевым трапециям. Применение данного движителя позволяет значительно снизить проскаль зывание опор у восьминогого шагающего аппарата при его повороте и тем самым снизить.энергетические затраты а также увеличить надежность. Формула изобретения Многоопорное шагающее транспортное средство, содержащее побортно-ра положенные четыре крайние и четыре средние ортогональные шагающие опоры горизонтальные направляющие крайних опор, установленные с возможностью поворота вокруг вертикальных осей и соединенные с приводом их вращения, отличающееся, тем, что, с целью повышения проходимости путем уменьшения проскальзывания опор по грунту во .время поворота транспортного средства, горизонтальные направляющие средних опор смонтированы с возможностью поворота вокруг вертикальных осей, которые совмещены с осями поворота соседних с ними направляющих крайних опор, а оси поворота всех направляющих расположены на концах этих опор, причем указанный привод вращения выполнен в виде цепной передачи с некруглыми звездочками. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 310012, кл. Е 02 F 9/04, 1969. 2.Патент США № 3135345, кл. 180-8, 1964. 7 г W 10 15 I. } L}
/
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Шагающая машина | 1978 |
|
SU713752A1 |
| Поворотное устройство шагающей машины | 1979 |
|
SU856890A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Кресло-коляска для инвалидов | 1990 |
|
SU1743605A1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |