Изобретение относится к машиностроению, в частности к соединениям деталей машин.
Известно [1, с.20, 3-й и 4-й абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Известно также, что существуют лишь две пространственные двухподвижные кинематические пары, которые согласно [1, с.31, табл.1, поз.5 и 6] называют парами IV класса. Одна из этих пар обеспечивает два вращательных движения в двух разных плоскостях и представляет собой сферический шарнир с пальцем [1, с.31, табл.1, поз.6]. Вторая двухподвижная пара называется цилиндрической парой [1, с.31, табл.1, поз.5], она обеспечивает одно вращательное и одно поступательное движения относительно одной из осей координат.
Известна двухконтактная кинематическая пара [2], которая обеспечивает поступательное и вращательное движения, однако при условии, что оба эти движения являются зависимыми. При некотором заданном взаимном расположении пальцев эта пара может обеспечить поступательное движение.
В качестве прототипа настоящего изобретения принимаем двухподвижную двухконтактную кинематическую пару [3]. Она обеспечивает два относительных поступательных движения звеньев. Два звена - плоскость и параллелепипед снабжены конусообразными выступами, и контакт звеньев происходит по образующим конусообразных выступов.
Недостатком этой пары является то обстоятельство, что при силовом анализе механизма трудно определить место приложения реакций в кинематической паре, так как контакт звеньев происходит по двум линиям.
Задачей настоящего изобретения является нахождение такого геометрического исполнения звеньев, при котором помимо линейчатого контакта используются два точечных, вследствие чего могут быть более точно определены реакции в кинематической паре.
Сущность изобретения заключается в том, что в предлагаемой двухподвижной кинематической паре, обеспечивающей комплекс двух независимых поступательных движений, включающей два соприкасающихся звена, первое звено выполнено из двух жестко соединенных параллелепипедов, установленных под углом менее 180°, а второе звено снабжено одной конической и двумя шаровыми опорами, при этом коническая поверхность контактирует с одним из параллелепипедов, а две шаровые поверхности - с другим параллелепипедом.
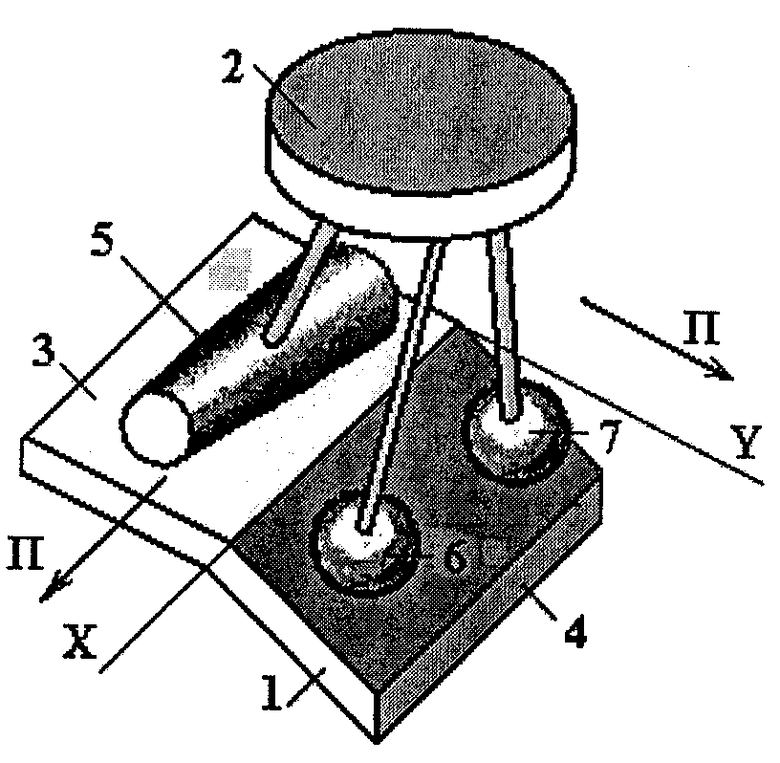
На чертеже изображена предлагаемая трехконтактная двухподвижная кинематическая пара. Она представляет собой соединение двух звеньев 1 и 2, причем звено 1 выполнено из двух параллелепипедов 3 и 4, жестко соединенных между собой под углом менее 180°, а звено 2 снабжено конусообразной опорой 5 и двумя шаровыми опорами 6 и 7. При этом тремя контактами пары являются места соприкосновения конусообразной опоры с параллелепипедом 3 (линейчатый контакт) и обеих шаровых опор звена 2 с параллелепипедом 4 (точечные контакты).
Работает пара следующим образом. При обеспечении линейчато-точечного контакта звеньев предлагаемая пара позволяет осуществить лишь два независимых друг от друга поступательных движения, а именно перемещение одного из звеньев вдоль оси Х и вдоль оси Y. Любой независимый поворот звена 1 относительно звена 2 вокруг вертикальной оси, перпендикулярной плоскости XY, приведет к нарушению одного из контактов между звеньями и потому невозможен. Необходимо отметить, что при перемещении звена 2 вдоль оси Y неизбежен некоторый разворот звена 2 вокруг оси X. Однако этот разворот является зависимым от основного движения, а потому такая пара является двухподвижной, т.к. независимых друг от друга движений можно задать в ней два. Так, например, винтовая пара обеспечивает два движения - вращательное и поступательное [1, с.22, п.6], однако так как поступательное движение является зависимым, она названа одноподвижной [4, с.10, поз.26].
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Учебник для ВТУЗов. - 4-е изд., перераб. и доп. - М.: Наука, Гл. ред. физ.-мат. лит., 1988, 640 с.
2. Дворников Л.Т., Живаго Э.Я. Двухконтактная кинематическая пара. Патент РФ на изобретение №2098701, Бюл. №34, 1997 г.
3. Дворников Л.Т., Живаго Э.Я. Двухконтактная двухподвижная кинематическая пара. Патент РФ на изобретение №2137964 от 20.09.99.
4. Теория механизмов и машин. Терминология. Вып.93. - М.: Наука, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2520624C2 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
Изобретение относится к области машиностроения и может быть использовано для соединения деталей машин. Пара включает два соприкасающихся звена. Первое звено выполнено из двух жестко соединенных параллелепипедов, установленных под углом менее 180°. Второе звено снабжено одной конической и двумя шаровыми опорами. Коническая поверхность контактирует с одним из параллелепипедов, а две шаровые поверхности - с другим параллелепипедом. Технический результат заключается в геометрическом исполнении звеньев, при котором помимо линейного контакта используется два точечных, вследствие чего могут быть определены реакции в кинематической паре. 1 ил.
Трехконтактная двухподвижная кинематическая пара, обеспечивающая комплекс двух независимых поступательных движений, включающая два соприкасающихся звена, отличающаяся тем, что первое звено выполнено из двух жестко соединенных параллелепипедов, установленных под углом не менее 180°, а второе звено снабжено одной конической и двумя шаровыми опорами, при этом коническая поверхность контактирует с одним из параллелепипедов, а две шаровые поверхности - с другим параллелепипедом.
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т.1, с.45, рис.57 | |||
| WO 9309356, 13.05.1993. | |||

